

3127
.pdfMд j = kп j (q задд j - qд j ) - kc j qд j . |
(5.36) |
|
|
Редуктор координаты c номером j осуществляет преобразование угла поворота вала двигателя qд j во вращательное движение механизма по соответствующей координате qj . Углы и скорости при этом связаны соотношениям
qзадд j = nj qзад j , qд j = nj qj , qд j |
= nj q j , j =1, 2, |
(5.37) |
|
|
|
где nj – передаточное число редуктора |
|
|
Подставляя выражения (5.37) в (5.36), получим следующее уравнение: |
|
|
Mд j = nj kп j (qзад j - qj ) - nj kc j q j . |
(5.38) |
|
|
|
|
5.6. Cтабилизация пространственного движения двухкоординатного манипулятора
181
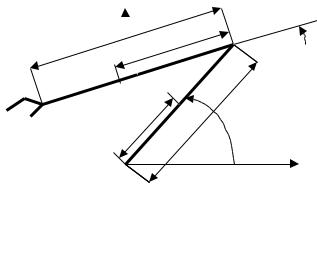
Рассматриваемый двухкоординатный манипулятор, работающий в угловых координатах, может быть представлен в виде расчетной схемы, изображенной на рис. 5.4.
Уравнения движения манипулятора, полученные на основе аппарата Лагранжа, имеют
|
|
|
l |
1 |
x2 |
|
l |
01 |
|
|
|
q 1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m 2 |
|
|
|
|
|
|
|
|
|
|
|
l02 |
|
q 2 |
|||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
l 2 |
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
x 1 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
Рис. 5.4. Расчетная схема двухкоординатного нипулятора, |
||||||||||||
|
|
Рис. 1. Расчетная с ема |
манипулятора |
|||||||||
|
|
|
|
|
|
|
|
схема манипулятора |
||||
|
работающегоРис. 1. Расчетнаяв угловой системе координат |
|||||||||||
следующий вид: |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
2 |
+J3 gcos q1/l2 = M1, |
||
J1 q1 |
+J3 cos (q2 -q1) q2 |
- J3 sin (q2 -q1) q |
2 |
|||||||||
|
|
|
|
|
|
|
|
|
2 |
(5.39) |
||
|
|
|
|
|
|
+J20 g cos q2/l2 =M2, |
||||||
J2 q2 |
+J3cos (q2 -q1) q1 +J3 sin (q2 |
-q1) q1 |
||||||||||
182
где J1 = m1l012 – момент инерции первого звена относительно его оси вращения;
J3 = - m1l01 l2 ;
g – ускорение свободного падения;
M1, M2 – вращающие моменты, действующие в сочленениях первого и второго звеньев;
J2 = m1l22 +m2 l022 ; J20 = m2 l2 l02 + m1l22.
В системе подчиненного управления двигателями постоянного тока с ПИ-регуляторами тока и П-регуляторами скорости и положения моменты в соответствии с (5.38) моменты M1, M2 определяются из выражений
M1 = nkп 1 (q1 З - q1 ) - nkс 1 q1 , (5.40)
M2 = nkп 2 (q2 З - q2 ) - nkс 2 q2 ,
где n – коэффициент передачи редукторов координат;
kп 1 kс 1 , kп 2 , kс 2 – коэфициенты, определяемые из выражений (5.35); q1З, q2 З – заданные перемещения координат q1 , q2 .
Уравнения (5.39) с учетом (5.40) и инерционности якорей двигателей приобретают вид
|
|
|
- J3 |
|
2 |
+ |
J1с q1 |
+ J3 cos (q2 - q1) q2 |
sin (q2 - q1) q |
2 |
|||
+ n k с1 q1 |
+J3 g cos q1 / l2 + n kп 1 q 1 = n kп 1 q1З , |
|||||
|
|
|
|
|
|
|
|
|
|
|
(5.41) |
|
|
183
J2с q2 + J3 cos (q2 - q1) q1 + J3 sin (q2 - q1) q 12 + + n k с2 q2 + J20 g cos q2 / l2 + n kп 2 q2 = n kп 2 q2З ,
где J1с , J2с – суммарные моменты инерции, приведенные к выходным валам редукторов первой и второй координат.
Уравнения (5.41) движения исполнительной системы характеризуются взаимовлиянием координат по ускорению, скорости и перемещению. Выражая из второго уравнения ускорение
q2 |
и подставляя его в первое уравнение, а затем наоборот, исключим из уравнений взаимовлия- |
||||||||
ние по ускорению |
|
|
|
|
|
||||
|
|
2 |
|
|
- J2 с n k п1 q1- J2с J3 |
g cos q1/l2 + |
|
||
q1 |
= (B q |
1 |
/2 - J2с n k с1 q 1 |
|
|||||
|
|
|
|
|
|
2 |
|
|
|
|
+J2с n kп1 q1З + J2с Е q |
2 +Д k с2 |
q2 +Д kп 2 q2 + |
|
|||||
|
|
|
+Д J20 g cos q2 / l2 n - Д kп 2 q2 З ) / Г, |
|
|||||
|
|
|
2 |
|
- J1с n kп 2 q2 - J1с J20 |
g cos q2 / l2 + |
(5.42) |
||
q2 |
= (-В q |
2 |
/2 - J1с nkс2 q2 |
|
|||||
+J1с n kп 2 q2 З - J1с Е q 12 +Д k с1 q 1 +Д k п 1 q1+
+Д J3 g cos q1 / l2 n - Д k п 1 q1З ) / Г,
где В = J32 sin 2(q2 - q1); Е = J3 sin (q2 - q1);
184
Д = J3 cos (q2 - q1) n;
Г= J1с J2с - J32 cos2 (q2 - q1).
Кинематическая взаимосвязанность степеней подвижности манипуляторов определяет не-
обходимость устранения существенного взаимного влияния подсистем отдельных координат друг на друга. Эта задача может быть решена путем совершенствования системы управления следящими приводами манипулятора за счет введения в существующую структуру адаптивного регулятора.
Уравнения эталонного движения для рассматриваемой исполнительной системы имеют следующий вид:
J1с q1m + n kс1 q1m + nkп1 q1m = nkп 1 q1 З,
(5.43)
J2с q2 m + n kс 2 q2 m + n kп2 q2m = n kп2 q2З,
где q1m , q1m , q1m , q2m , q2m , q2m – ускорения, скорости и перемещения координат при эталонном движении.
Динамика эталонной модели определяется только настройками подчиненных контуров. Задачами адаптивного управления являются развязывание динамики подсистем отдельных координат реального манипулятора, т.е. компенсация их взаимного влияния, и согласование собственного (локального) движения подсистем с эталонным движением (5.43), возбуждаемым программным управлением.
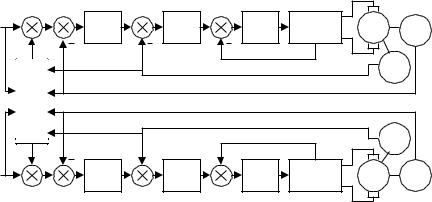
Структурная схема системы управления, обеспечивающей решение этих задач, приведена на рис. 5.5.
185
q1 |
З |
|
РП1 |
РС1 |
РТ1 |
ШИП1 |
М1 ДП1 |
|
|
|
|||||
|
|
Uа1 |
q 1 |
|
|
|
|
|
|
|
|
|
ДС1 |
||
|
|
|
q 1 |
|
|
|
|
|
АР |
q 2 |
|
|
|
|
|
|
|
На схеме представлены трехконтурные исполнительные приводы двух координат робота и |
|||||
приняты следующие обозначения: |
|
|
ДС2 |
||||
|
|
Uа2 |
q |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
РП1, РП2 – регуляторы положения; |
|
|
|||
|
|
|
РП2 |
РС2 |
РТ2 |
ШИП2 |
М2 ДП2 |
q |
2 З |
РС1, РС2 – регуляторы скорости; |
|
|
|||
|
|
РТ1, РТ2 – регуляторы тока; |
|
|
|
||
|
|
ШИП1, ШИП2 – широтно-импульсные пр обр зов т ли; |
|||||
|
Рис. 2. Структурная схема самонаст аив ющей я системы упр вления |
||||||
7. Рис. 5.5. Структурная схема само- |
|||||||
|
|
|
|
|
|
186 |
|
|
|
|
настраивающейся |
|
|||
М1, М2 – двигатели; ДП1, ДП2 – датчики положения;
ДС1, ДС2 – датчики скорости.
|
Адаптивный регулятор АР, используя информацию о заданных |
перемещениях q1З, q2З |
|||||
координат, а также о фактических перемещениях q1, q2 |
и скоростях q1, |
q2 движения, формиру- |
|||||
|
|
|
|
|
|
|
|
ет управляющие воздействия Uа1, Uа2 в соответствии с выражениями |
|
|
|||||
|
|
|
Uа 1 =Uа л 1 +Uа р 1 , |
Uа 2 =Uа л 2 +Uа р 2 , |
(5.44) |
||
где Uа л 1 , Uа л 2 – локальные адаптивные управляющие воздействия; |
|
|
|||||
|
Uа р 1 , Uа р 2 – развязывающие адаптивные управляющие воздействия. |
|
|
||||
|
Локальные адаптивные управляющие воздействия определяются параметрами движения и |
||||||
самонастраивающимися коэффициентами ki 1 (t), ki 2 (t ), ki 3 (t), ki 4 (t ): |
|
|
|||||
|
|
|
2 |
(5.45) |
|
|
|
Uа л i = ki 1 (t )qi +ki 2 (t) qi +ki 3 |
(t ) q i +ki 4 (t )qi З , i = 1, 2. |
|
|
|
|||
|
|
|
Настройка параметров может осуществляться в соответст- |
||||
|
|
|
вии с уравнениями /4/: |
|
|
|
|
k i1 (t)=-Gi 1 di qi -Ai 1 ki 1 (t), |
k i 2 |
(t)= -Gi 2 di qi -Ai 2 ki 2 (t ), |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
(t)=-Gi 4 di qi З -Ai 4 ki 4 (t ), |
(5.46) |
|
|
|
k i 3 |
(t)=-Gi 3 di q i -Ai 3 ki 3 (t), |
k i 4 |
|
|
|
||
187

di = pi 1 |
(qi - qi m )+pi 2 (qi |
qi m ) , |
i = 1, 2, |
|
|
|
|
где Gi 1 , Ai 1 , |
Gi 2 , Ai 2 , Gi 3 , Ai 3 , Gi 4 , |
Ai 4 , pi 1 , pi 2 – положительные коэффициенты усиления |
|
алгоритмов настройки. |
|
|
|
Коэффициенты Gi 1 , Gi 2 , |
Gi 3 , Gi 4 , pi 1 , pi 2 определяют степень приближения перемеще- |
||
ний и скоростей координат манипулятора к эталонным, а коэффициенты Ai 1 , Ai 2 , Ai 3 , Ai 4 – глубину стабилизирующей отрицательной обратной связи по самонастраивающимся парамет-
рам ki 1 (t), ki 2 (t), ki 3 (t), ki 4 (t).
|
|
|
|
|
|
Развязывающие адаптивные воздействия равны |
|||
|
|
|
|
|
2 |
|
+k110(t) q2З, |
|
|
Uар1= k16(t) q2+k17(t) q 2 |
+k18(t) q |
2 |
+k19(t) q1q2 |
|
|||||
|
|
|
|
|
2 |
|
+k210(t) q1З , |
(5.47) |
|
|
|
|
|
||||||
Uар2 = k26(t) q1+k27(t) q1 |
+k28(t) q 1 |
+k29(t) q1q2 |
|
||||||
|
|
|
|
|
|
при этом алгоритмы настройки параметров выражаются сле- |
|||
|
|
|
|
|
|
дующими уравениями: |
|
||
k16 (t)= - G16 d1 q2 - A16 k16 (t), |
k17 |
(t)= - G17 d1 q 2 - A17 k17(t), |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
2 |
k18(t), |
|
|
|
|
|
|
k18 |
(t)= - G18 d1 q |
2 -A18 |
k |
19 (t)= - G19 d1 q1q2 -A19 k19(t), |
|||||
k110 (t)= - G110 d1 q2З-A110 k110(t), |
k 26 (t)= - G26 d2 q1-A26 k26(t), (5.48) |
||||||||
|
|
|
|
|
|
|
2 |
|
|
k 27 (t)= - G27 d2 q1 -A27 k27(t), |
k |
28 (t)= - G28 d2 q |
1 -A28 k28(t), |
|
|||||
k 29 |
(t)= - G29 d2 q1q2 -A29 k29(t), |
k |
210 (t)= -G210 d2 q1З-A210 k210(t). |
||||||
|
|
|
|
|
|
|
|
|
|
188
где G16, A16, G17, A17, G18, A18, G19, A19, G110, A110, G26, A26, G27, A27, G28, A28, G29, A29, G210, A210 – по-
ложительные коэффициенты усиления алгоритмов настройки. Коэффициенты G16, G17, G18,
G19, G110, G26, G27, G28, G29, G210 определяют степень приближения перемещений и скоростей координат манипулятора к эталонным, а коэффициенты A16, A17, A18, A19, A110, A26, A27, A28, A29, A210
– глубину стабилизирующей отрицательной обратной связи по самонастраивающимся парамет-
рам k16(t), k17(t), k18(t), k19(t), k110(t), k26(t), k27(t), k28(t), k29(t), k210(t).
Совокупность уравнений движения исполнительной системы, выражений для определения адаптивных управляющих воздействий и алгоритмов настройки параметров в уравнениях для расчета локальных и развязывающих воздействий представляет собой математическую модель робота с угловой системой координат, которая используется для моделирования на ЭВМ и исследования самонастраивающейся системы управления.
Реализация алгоритмов кинематического, динамического и адаптивного управления требует применения современных ЭВМ. Они обеспечивают необходимую гибкость благодаря простоте программирования и перепрограммирования и позволяют создавать сложные информационные и управляющие системы. Вопросам создания аппаратных и программных средств систем управления роботами посвящена следующая глава.
189
190