

Элементы гидравлических сетей, гидроаппаратура распределительная и регулирующая, насосы и двигатели гидравлические.
3.3.1.Изучить типовые схемы систем управления механизмами строительных машин;
3.3.2.Изучить общее устройство систем управления конкретными механизмами строительных машин (по указанию преподавателя).
3.4. Форма отчёта
Лабораторная работа № 3
1.Цель работы.
2.Классификация систем управления, назначение, общее устройство.
3.Составить схему системы управления рабочим органом строительной машины с описанием её элементов (по заданию преподавателя).
Лабораторная работа № 4
Устройство ходового оборудования строительных и дорожных машин
иклассификация
4.1.Цель работы
Изучить различные виды ходового оборудования строительных и дорожных машин. Ознакомиться с основными параметрами, характеризующими взаимодействие ходовой части с опорной поверхностью при движении.
4.2. Общие сведения к выполнению работы
Ходовая часть – это совокупность элементов шасси, образующих ходовую тележку самоходных и прицепных машин. Она предназначена для передвижения машин, передачи нагрузки на опорную поверхность, обеспечения устойчивости машин, реализации тягового усилия через движитель. Движителем называют устройство, преобразующее энергию силовой установки в движение машины: у автомобиля – это ведущие колеса, у гусеничного трактора – гусеничные тележки и т. д.
Для строительных и дорожных машин характерными является пневмоколесный, гусеничный и рельсовый ход.
Пневмоколесный ход наряду с высокой универсальностью обеспечивает хорошую маневренность, высокие скорости передвижения и проходимость.
15

Основным элементом пневмоколесных ходовых частей является пневматическая шина (рис. 4.1).
По конструкции шины бывают диагональные и радиальные, шины высокого (0,5…0,7 МПа) и низкого (0,12…0,35 МПа) давления. В зависимости от соотношения Н/В различают шины обычные (Н/В = 0,9…1,1), широкопрофильные (Н/В = 0,4…0,9), арочные (Н/В = 0,3…0,4) (рис. 5.1, д) и
пневмокатки(Н/В=0,2…0,30)(рис.5.1, е).
Рис. 4.1. Пневматические шины:
а – камерная; б – бескамерная; в – основные размеры шины; г – типы рисунков протекторов; д – арочная; е – пневмокаток; 1 – покрышка; 2 – камера; 3 – ободная лента; 4 – вентиль; 5 – полость покрышки; 6 – обод колеса
У обычной шины наружный диаметр D связан с высотой Н и диаметром обода d зависимостью
D ≈ 2H +d . |
(4.1) |
Шины диаметром свыше 1,5 м называют крупногабаритными. Маркировку шин наносят на боковины двумя числами. Например: 14,00-20. Первое число характеризует ширину профиля В, а второе - внутренний диаметр (или посадочный диаметр) d в дюймах.
В пневмоколесные ходовые части входят элементы подвески (рис. 4.2).
16
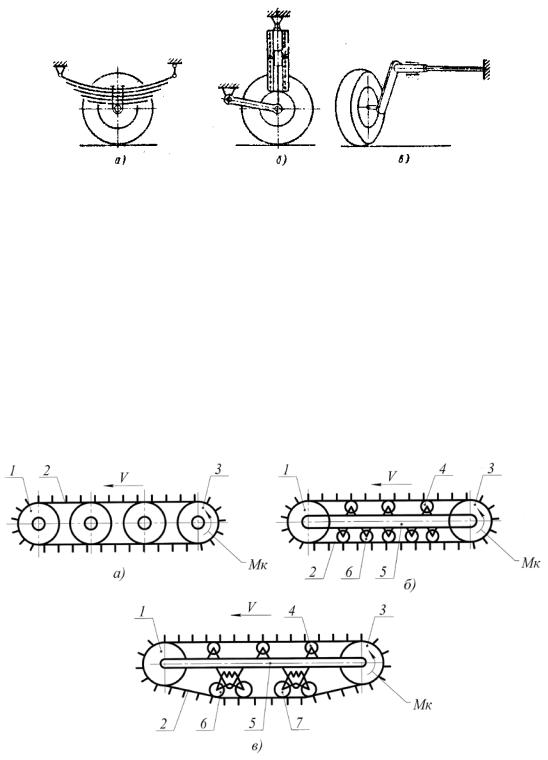
Рис. 4.2. Упругие подвески:
а – рессорная; б – пружинная; в – торсионная
Упругие подвески предназначены для снижения динамических нагрузок, действующих на раму машины при передвижении.
Гусеничное ходовое оборудование по сравнению с пневмоколесным имеет большую поверхность опоры, что обеспечивает лучшее сцепление с грунтом, повышенную проходимость в условиях бездорожья и слабонесущих грунтов. Удельное давление на грунт гусеничного хода 0,04…0,1 МПа.
К недостаткам гусеничного хода следует отнести сложность конструкции, интенсивность износа, большую массу (до 40 % общей массы машины), малые транспортные скорости.
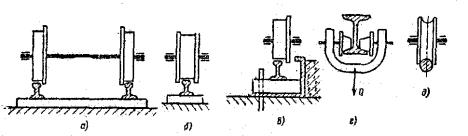
Разновидности гусеничного хода и устройство показаны на рис. 4.3.
Рис. 4.3. Гусеничный ход:
а– жесткий малоопорный; б – жесткий многоопорный;
в– упругобалансирный; 1 – направляющее колесо; 2 – гусеница; 3 – ведущее колесо; 4 – поддерживающие катки; 5 – рама гусеничной тележки;
6 – опорные катки; 7 – балансир с упругим элементом
Рельсовый ход характеризуется простотой конструкции, надежностью и долговечностью. Рельсовый ход применяют для различных кранов
17
(башенных, мостовых, козловых). Недостатками рельсового хода являются малая маневренность, ограничение уклона пути, необходимость укладки рельсовых путей. На рис. 4.4 показаны различные виды рельсового хода.
Рис. 4.4. Рельсовый ход:
а– вагонная ось с одноребордными колесами;б– двухребордное колесо (крановое);
в– рельсформа;г– монорельс сгрузовой тележкой;д– канатный монорельс
По назначению колеса разделяются на ведущие и ведомые. В результате взаимодействия ведущего колеса с опорной поверхностью крутящий момент, подводимый от двигателя к движителю, преобразуется в силу тяги. Ведомое колесо является только поддерживающим элементом и вращается при движении машины под действием толкающей силы, приложенной к оси колеса. При перекатывании колес возникают сопротивления, которые вызваны как деформацией опорной поверхности, так и деформацией шины.
Приложенный к ведущему колесу крутящий момент определяется:
Mкр = Mдв i η, |
(4.2) |
где Mдв – крутящий момент на валу двигателя, кН·м; |
i , η – передаточное |
число и КПД трансмиссии.
Для характеристики взаимодействия ходового оборудования с опорной поверхностью используют коэффициенты сопротивления качению f и
коэффициент сцепления ϕ . |
|
|
|
|
|
||
f = |
Pf |
|
; |
(4.3) |
|||
G |
|||||||
|
|
|
|
|
|||
|
|
k |
|
|
|
||
ϕ = |
Pk max |
, |
(4.4) |
||||
|
|||||||
|
|
G |
|
|
|
||
|
|
k |
|
|
|
||
где Pf – сила сопротивления качению, |
кН; |
Pk max – максимальная сила тяги |
|||||
движителя, кН; Gk – вертикальная нагрузка на ведущее колесо, кН.
На рис. 4.5 представлены схемы сил, действующих на колесо при работе в различных режимах.
Для обеспечения качения к движителю подведен крутящий момент Mкр . Равнодействующая элементарных реактивных сил, возникающих в
результате взаимодействия шины и опорной поверхности, обозначена через N ; её вертикальная и горизонтальная составляющие обозначены R и T . При этом T = Fk и R =Gk .
18
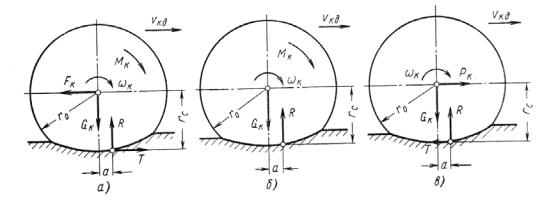
Рис. 4.5. Схемы сил, действующих на колесо:
а – «ведущее колесо»; б – «свободное колесо»; в – «ведомое колесо»
Уравнение равновесия колесного движителя:
|
|
|
|
|
|
Mкр |
=T rc + R a , |
(4.5) |
||||||
где rc |
– силовой радиус |
колесного |
движителя, м; a |
– снос реакции |
||||||||||
приложения силы N , м. |
|
|
|
|
|
|
|
|
|
|||||
|
|
Разделив обе части уравнения на rc |
получим |
|
||||||||||
|
|
|
|
|
|
|
Mкр |
=T |
+ R |
a |
|
, |
(4.6) |
|
|
|
|
|
|
|
|
r |
|
r |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
c |
|
|
|
c |
|
|
|
|
|
где |
|
Mкр |
– отношение, |
представляющее собой окружную силу – P ; |
||||||||
|
|
|
|
|||||||||||
|
|
|
|
rc |
|
|
|
|
|
|
|
|
k |
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
||
|
= f – принят как коэффициент сопротивления качению. |
|
||||||||||||
|
r |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
Тогда, обозначив Pk =T +Gk f |
и Gk |
f = Pf , получим |
|
|||||||||
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
Pk =T + Pf . |
|
(4.7) |
||||
Таким образом, окружная сила колесного движителя в режиме «ведущего колеса» равна сумме силы тяги и силы сопротивления качению.
Тяговые и экономические качества колесных и гусеничных машин для любых режимов работы наиболее полно оцениваются с помощью тяговых характеристик, представляющих собой графическое выражение выходных тяговых параметров машин. К таким параметрам относят:
1) коэффициент буксования колесного движителя δ :
|
T |
|
T |
n |
100 %, |
(4.8) |
||
δ = A |
+ B |
|
|
|||||
R |
R |
|||||||
|
|
|
|
|
|
|||
|
k |
k |
|
|
|
|||
где A , B , n – коэффициенты, зависящие от типа шин, рисунка протектора, давления воздуха в шине, состояния и влажности грунта (табличные величины);Rk – нормальная реакция грунта на ведущих колесах Rk =Gk , кН;
T – текущее значение силы тяги, кН;
19

2) действительная скорость машины Vд :
V |
= 0,377 nдв rc (1−δ |
i |
) , км/ч, |
(4.9) |
д |
i |
|
|
|
|
|
|
|
где nдв – частота вращения вала ДВС, об/мин; i – передаточное число трансмиссии на соответствующей передаче; δ i – текущее значение коэффициента буксования в зависимости от T i ;
3) тяговая мощность колесного движителя NT :
NTд=V T , кВт; 4) тяговый коэффициент полезного действия:
ηT = NT ,
Nдв
где Nдв – мощность двигателя внутреннего сгорания, кВт; 5) удельный расход топлива:
q =1000 |
|
Gч |
, г/(кВт·ч). |
|
|||
T |
|
NT |
|
|
|
|
(4.10)
(4.11)
(4.12)
4.3. Порядок проведения работы
Произвести расчет и построение тяговой характеристики колесных тракторов по данным, приведенным в табл. 4.1.
|
Характеристики колесных тракторов |
|
Таблица 4.1 |
|||
|
|
|
|
|||
№ |
Наименование показателей |
Трактор |
|
Трактор |
|
Трактор |
пп |
МТЗ-80 |
|
Т-150К |
|
К-701 |
|
|
|
|
||||
1 |
Масса трактора, приходящаяся на |
|
|
|
|
|
|
ведущие колёса, кг |
3000 |
|
8135 |
|
13500 |
2 |
Силовой радиус колеса, м |
0,774 |
|
0,8 |
|
0,85 |
3 |
Значение коэффициентов |
|
|
|
|
|
|
А |
0,12 |
|
0,12 |
|
0,12 |
|
В |
14,79 |
|
14,79 |
|
14,79 |
|
n |
6 |
|
6 |
|
6 |
4 |
Двигатель: |
|
|
|
|
|
|
мощность, кВт |
58,8 |
|
110 |
|
198,5 |
|
номинальнаячастотавращения,об/мин |
2200 |
|
2100 |
|
1900 |
|
часовой расход топлива, кг/ч |
14,6 |
|
26,9 |
|
51,5 |
5 |
Общее передаточное число |
|
|
|
|
|
|
трансмиссии на 1-й передаче |
107 |
|
88 |
|
120 |
20