

Методическое пособие 701
.pdfСервер под управлением Windows Server2003
Процедура задания параметров резервирования
Хранилище |
Резервное |
данных |
хранилище |
|
(RAID – массив) |
|
Процедура резервирования |
|
Процедура те- |
|
Процедура |
|
|
DAS |
|
невого копиро- |
|
зеркалирования |
|
|
|
|
вания |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Процедура виртуализации хранилища |
|
|
|||
|
|
|
|
|
|
|
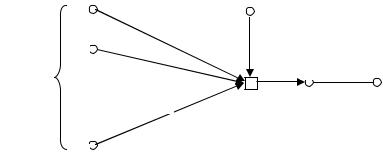
Рис. 2.17. Структурная схема резервного копирования данных
Техническое исполнение резервного копирования реализовано на базе единого сервера под управлением операционной системы Windows Server 2003. В состав соответствующего модуля входят следующие процедуры: задания параметров резервирования; резервирования DAS; теневого копирования; зеркалирования; виртуализации хранилища. Резервное хранилище включает 4 ЖМД емкостью 2000 ГГб каждый.
В рамках процедуры задания параметров резервирования системный администратор вводит значения требуемых параметров резервирования, таких как
-количество месячных резервных копий;
-количество еженедельных резервных копий;
-количество ежедневных резервных копий;
-наиболее целесообразный временной интервал резервирования данных;
-частота формирования теневых копий;
91
- размер места, отведенного для теневых копий.
Процедура резервирования DAS (direct-attached-storage) используется для реализации соответствующего типа резервирования. Выбор данного типа обусловлен его простотой реализации и относительно невысокой стоимостью. Поскольку резервное хранилище реализовано на жестких магнитных дисках, а не на накопителях на магнитных лентах, данный тип резервного копирования оказался практически лишенным недостатков.
Процедура теневого копирования реализует получение так называемых «Теневых копий» [191]. Системный администратор включает и настраивает службу Volume Shadow Copy, входящую в состав используемой операционной системы Windows Server 2003. Чтобы разрешить на сервере теневое копирование, вызывается окно свойств тома, осуществляется переход на вкладку «Теневые копии (Shadow Copies)», выбирается том и активизируется опция «Включить (Enable)». В результате пользователь имеет возможность доступа к различным версиям документа в соответствии с привязкой к определенному моменту времени. Само теневое копирование производится «на лету», независимо от того, открыт файл или нет. В этом режиме Windows Server 2003 копирует все файлы в общих папках и помечает их атрибутами с текущей датой и временем. Пока разрешено теневое копирование тома, Windows Server 2003 будет ежедневно создавать по две копии файлов. Этот процесс продолжится до исчерпания на диске места, отведенного под теневые копии. Вот почему в процедуре задания параметров резервирования важно настроить частоту копирования и размер места, отведенного для теневых копий. Теневое копирование томов позволяет создавать библиотеки версий файлов, тем самым обеспечивая доступ к сохраненным версиям удаленных или поврежденных файлов, что избавляет системных администраторов от одной из наиболее обременительных задач - восстановления одиночных файлов, ошибочно удаленных пользователями.
Для обеспечения надежности и восстановления после сбоев данные хранятся в различных местах и постоянно обновляются, благодаря чему изменение в одной реплике данных отражается и на других репликах. Именно эта идея лежит в основе схем зеркального отражения и репликации. Зеркалирование (mirroring) – технология, обеспечивающая копирование данных с одного носителя на другой в реальном времени. Она реализована в процедуре зеркалирования и обеспечивает систему хранения с резервированием всех данных. Технология зеркалирования тесно связана с формированием массивов RAID. Аббре-
виатура RAID расшифровывается как Redundant Array of Independent Disks - из-
быточный массив независимых дисков. Практически для всех реализаций мас-
92
сивов RAID общей является идея чередования (striping). Чередование состоит из определения базовой единицы ввода-вывода (обычно она имеет размер от 512 байт до 4 или 8 Мбайт) и метода физического размещения этих единиц на различных дисках. Таким образом, формируются логические блоки для кластеров более высокого уровня. Первая единица может находиться на диске 1, вторая - на диске 2 и т. д [165]. Реализация массивов RAID может быть аппаратной и программной. Использована аппаратная реализация массива RAID. Аппаратный RAID - устройство RAID, созданное и поддерживаемое на аппаратном уровне. Для операционной системы такое устройство выглядит как один физический жесткий диск - отдельные диски, составляющие данное устройство, системе невидны. Наиболее удобное, надежное и относительно не дешевое решение. Тем не менее данные затраты окупятся, поскольку позволят решить основные проблемы программной реализации массива RAID, в частности:
-вычисление четности и других данных, необходимых для работы массива, требует значительных затрат времени центрального процессора;
-для каждой операции записи по шине ввода-вывода передается две операции записи, одна для данных, вторая для четности;
-при использовании программных массивов RAID два уровня абстракции могут значительно повысить сложность и накладные расходы. Во-первых, файловая система добавляет уровень абстракции, осуществляя преобразование данных файлового ввода-вывода в данные блочного ввода-вывода на уровне тома. Во-вторых, диспетчер тома (внедряющий программный массив RAID) добавляет еще один уровень абстракции, выполняя преобразование блоков тома
вдисковые блоки. В контексте распределенной файловой системы (DFS) это означает необходимость получения двухуровневых блокировок - физических или виртуальных (т.е. файл, открытый в эксклюзивном режиме, может обрабатываться как виртуально заблокированный). Последнее имело принципиальное значение для реализации виртуализации хранилища.
Процедура виртуализации хранилища обеспечивает предоставление единого интерфейса для управления коммутаторами связной архитектуры. Данный интерфейс не зависит от производителя коммутатора, его модели и возможностей. Последовательность действий системного администратора при проведении резервного копирования заключается в следующем:
-создании тома (может потребоваться управление дисками или массива-
ми RAID);
-обеспечении доступности тома для механизма создания моментальных снимков (может потребоваться перенастройка зонирования);
93
-создании моментального снимка;
-реализации доступа сервера резервного копирования к тому с моментальным снимком;
-проведении резервного копирования;
-возвращении снимка в пул свободных ресурсов хранилища, для чего может также потребоваться дополнительная настройка коммутатора.
Обычно все происходит таким образом: администратор хранилища выполняет часть действий вручную, запускает программное обеспечение, выполняет еще несколько ручных операций, запускает другое программное обеспечение и т.д.
Процедура виртуализации хранилища позволяет полностью автоматизировать эти задачи.
Модуль ввода данных входит в состав каждой ВД и обеспечивает загрузку исходных данных, требуемых для работы соответствующего приложения. Применительно к НМХ это: число временных интервалов и их протяженности, значения исходного временного ряда и др. Данный модуль также обеспечивает загрузку данных из различных источников, выбираемых пользователем, в ХД.
Модуль автоматизированной загрузки данных предназначен для оперативного ввода больших объемов данных (курсов акций, котировок валют и др.)
вавтоматическом режиме. В качестве примера на рис. 2.18 приведена блоксхема алгоритма автоматизированного ввода информации о котировках акций.
Блоки 1,11 обеспечивают пуск и остановку данного алгоритма. В блоке 2 реализован выбор требуемой акции из списка.
В блоке 3 пользователь подтверждает свои намерения работать с выбранной акцией. Если это так, то управление передается в блок 4. В противном случае управление передается в блок 11.
Блок 4 обеспечивает вывод характеристик выбранной акции.
В блоке 5 пользователь принимает решение об обновлении информации по выбранной акции. В случае положительного решения, управление передается в блок 6. В противном случае управление передается в блок 3.
Блок 6 предназначен для соединения с одним из сайтов, предоставляющих информацию о данном типе акции.
В блоке 7 реализовано обновление характеристик выбранной акции. Блок 8 обеспечивает запись обновленной информации в базу данных.
Вблоке 9 ЛПР принимает решение о необходимости анализа информации о данной акции. В случае положительного решения, управление передается
вблок 10. В случае отрицательного решения, управление передается в блок 4.
94

1
Начало
2
Выбор акции из
списка
3 |
Выбрать |
да |
|
4 |
|
|
Вывод данных об |
||||
|
|
|
|||
|
акцию? |
|
|
|
акции |
|
|
|
|
|
|
 нет
нет
11
нет 5 Обновить
данные?
6
да
Соединение
ссайтом
7Обновление инфор-
мации
8Копирование в ВД
вывод обн.инф.
9Анализировать нет
изменения ?
да
10
Вывод результатов анализа в табл. и граф. форме
11
Конец
Рис. 2.18. Блок схема алгоритма автоматизированного ввода информации о котировках акций
95

Структурно–функциональная схема модуля автоматизированного ввода данных приведена на рис.2.19.
Процедура аутенти- |
|
Процедура подклю- |
|
Процедура загрузки |
фикации |
|
чения к инф. сайтам |
|
(обновления) данных |
|
|
|
|
|
Процедура таблич- |
|
|
|
Процедура графиче- |
|
Интерфейс |
|||||
ного представления |
|
|
ского представления |
||
|
пользователя |
|
|||
данных |
|
|
данных |
||
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
ВД
Рис. 2.19. Структурно – функциональная схема модуля автоматизированного ввода данных
Интерфейс пользователя – это набор процедур, обеспечивающих взаимодействие ЛПР с программным модулем.
Процедура аутентификации обеспечивает проверку пароля.
Процедура подключения к информационным сайтам обеспечивает выход пользователя на сайты, содержащие информацию о вводимых данных.
Процедура загрузки (обновления) данных обеспечивает первичный ввод исходных данных либо их обновление по желанию пользователя. Представляемые данные могут быть получены либо из сайта, либо из ВД. Данная процедура включает форму выбора номенклатуры вводимого инструмента (например, акции) из предложенного списка, а также таблицу статистики цен (котировок акций), показывающей данные об изменении котировок.
Процедура табличного представления данных обеспечивает формирование таблицы, в которой размещены исходные данные (характеристики акций).
Процедура графического представления данных реализует отображение введенных данных (характеристики акций) в графическом виде.
Внешний вид окна главной экранной формы модуля автоматизированного ввода данных с открытой вкладкой «Статистика цен», приведен на рис. 2.20.
96

Рис. 2.20. Главная форма программного модуляавтоматизированного ввода данных
Если выбрана закладка «График» и нажата кнопка «Показать», то появится график, показывающий, как изменялась стоимость данной акции на протяжении выбранного интервала времени (рис. 2.21.).
Рис. 2.21. Главная форма программного модуля с активированной закладкой «График»
97
2.4.2. Специальное математическое и программноеобеспечение подсистемыисследованияискусственных нейронных сетей
Подсистема исследования ИНС предназначена для поиска рациональных структур и обучающих алгоритмов ИНС в максимальной степени адаптированных для прогнозирования «риск – эффектов» для НМШ. Она включает программные модули: «Многослойный персептрон»; «Алгоритм обратного распространения ошибки»; «Алгоритм имитации отжига»; «Эвристические алгоритмы обучения»; «Адаптация архитектуры нейронной сети»; «Градиентные алгоритмы обучения».
Модуль «Многослойный персептрон» реализует генерацию структур ИНС данного класса. В настоящее время данный вид ИНС находит широкое применение в качестве инструмента прогнозирования временных рядов [104, 148], что обусловило их выбор в интересах прогнозирования значений «риск – эффектов» для НМШ [83]. В теоретическом плане, на примере модели простейшего персептрона (рис. 2.22) доказана принципиальная возможность корректной настройки персептрона. Последнее выражается в существовании и сходимости алгоритма обучения [174].
x1 |
w1 |
Порог, b |
|
|
|
x2 |
|
|
|
||
|
|
|
Выход |
||
Входы |
w2 |
|
|||
|
y |
||||
|
|
||||
. |
wm |
Ограничитель |
|
||
. |
|
|
|
||
Линейный
сумматор
xm
Рис. 2.22. Модель простейшего персептрона
На рис. 2.22 показано, что структура простейшего персептрона состоит из единственного нейрона, который в свою очередь представляется линейным сумматором и ограничителем. Сумматор вычисляет линейную комбинацию входных сигналов, поступающих на синапсы с учетом внешнего возмущения (порога). Полученная сумма (так называемое индуцированное локальное поле) передается на узел ограничителя. Ограничитель реализован в виде пороговой функции, определяющей знак. Выход нейрона принимает значение +1, если сигнал на выходе сумматора положителен, и -1, если отрицателен. В данной модели синаптические веса персептрона обозначены w1, w2,…, wm,; сигналы, поступающие на вход персептрона, обозначены х1,x2, …, хт; пороговое значение - b. Входной сигнал ограничителя (т.е. индуцированное локальное поле) нейрона определяется выражением:
m |
|
v wixi b. |
(2.29) |
i 1
98

Целью функционирования простейшего персептрона является корректное отнесение множества входных сигналов (входных образов) х1,x2, …, хт к одному из двух классов: С1 или С2. Решающее правило такой классификации заключается в следующем: входной сигнал относится к классу С1, если выход у равен +1, и к классу С2 в противном случае (если выход равен -1).
В данном случае в m-мерном пространстве сигналов, определяемом переменными х1,x2, …, хт имеются всего две области решения (рис. 2.23), разделенные гиперплоскостью, определяемой формулой (3.30):
m |
wi xi b 0. |
(3.30) |
i 1 |
|
|
Для случая двух переменных, х1 и х2, когда разделяющая гиперплоскость вырождается в прямую, точки (x1,x2), лежащие выше этой прямой, относятся к классу С1 а точки, расположенные ниже прямой, принадлежат классу С2. Пороговое значение определяет смещение разделяющей поверхности по отношению к началу координат.
х2
Класс С1
Класс С2
x1
0
Граница решений w1x1+w2x2+b=0
Рис. 2.23. Разделяющая поверхность в виде гиперплоскости для двумерной задачи классификации образов на два класса
Синаптические веса персептрона w1, w2,…, wm можно адаптировать итеративным методом. В частности, для настройки весовых коэффициентов можно использовать алгоритм, основанный на коррекции ошибок и получивший название алгоритма сходимости персептрона.
Для определения алгоритма обучения персептрона, основанного на коррекции ошибок, построим модифицированный гpаф передачи сигнала (рис. 2.24). Данный граф эквивалентен модели нейрона, показанной на рис. 2.22. При этом порог b(n) рассматривается как синаптический вес связи с фиксированным входным сигналом + 1.
Это можно описать следующим входным вектором размерности (m+ 1):
99

|
x(n) [ 1,x1(n),x2(n),...,xm(n)]T , |
(2.31) |
||
где n - номер итерации алгоритма. |
|
|
||
Фиксированный |
|
|
|
|
вход |
x0= +1 |
|
|
|
|
x1 |
w0=b |
|
|
|
x2 |
w1 |
|
|
|
|
|
Выход |
|
Входы |
|
|
||
w2 |
Жесткое |
y |
||
|
. |
wm |
|
|
|
. |
ограничение |
|
|
Линейный xm сумматор
сумматор
Рис. 2.24. Эквивалентный граф передачи сигнала для персептрона
Аналогично можно определить (m + l) мерный вектор весовых коэффициентов:
w(n) [b(n),w1(n),w2(n),...,wm(n)]T . |
(3.32) |
Следовательно, выход линейного сумматора можно записать в более |
|
компактной форме: |
|
m |
|
v(n) wi (n)xi (n) wˆT (n)x(n), |
(2.33) |
i 0
где wo(n) - пороговое значение b(n). При фиксированном значении n,
уравнение wˆT (n) 0в m -мepном пространстве с координатами х1,x2, …, хт оп-
ределяет гиперплоскость (для нeкoтopoгo предопределенноro значения порога), которая является поверхностью решений для двух различных классов входных сигналов.
Чтобы персептрон функционировал корректно, два класса, С1 и С2, должны быть линейно разделимыми. Это, в свою очередь, означает, что для правильной классификации образы должны быть отдалены друг от друга, чтобы поверхность решений могла представлять собой гиперплоскость. Это требование проиллюстрировано на рис. 2.25 для случая двумерного персептрона. Из рисунка видно, что два класса С1 и С2 удалены друг от друга, и их можно разделить гиперплоскостью (в данном случае прямой).
Предположим, что входные переменные персептрона принадлежат двум линейно разделимым классам. Пусть Х1 подмножество векторов обучения хl(l), xl(2), ..., которое принадлежит классу C1 , а Х2 подмножество векторов обучения хl(l), xl(2), ..., относящееся к классу С2. Объединение подмножеств Х1 и Х2 составляет все обучающее множество Х. Использование подмножеств Х1 и Х2 для обучения классификатора позволит настроить вектор весов w таким образом, что два класса С1 и С2 будут линейноразделимыми. Это значит, что существует
100