

Лекции / Лекция 13 Физические процессы в АМ
.pdfФизические процессы в асинхронных машинах
Асинхронная машина при неподвижном роторе. Рассмотрим асинхронную машину, имеющую трехфазные обмотки на статоре и роторе. Ротор этой машины заторможен. Если обмотку статора подключить к трехфазной системе напряжений, а к обмотке ротора подсоединить сопротивление нагрузкиZнг (рис. 2.1), то в этом случае
асинхронная машина будет работать как трансформатор с вращающимся магнитным полем.
Рис. 2.1. Асинхронная машина как трансформатор
От трансформатора асинхронная машина будет отличаться в конструктивном отношении (распределением обмотки, наличием зазора и т. д.). Поэтому для анализа работы асинхронной машины при неподвижном роторе могут быть использованы основные уравнения, векторная диаграмма и схема замещения, полученные для трансформатора.
Магнитное поле основной гармоники индуктирует в обмотке статора ЭДС
E1 π
 2 f1W1Kоб1 ,
2 f1W1Kоб1 ,
а в обмотке ротора со скошенными пазами ЭДС

E2 π
 2 f1W2Kоб2Kс .
2 f1W2Kоб2Kс .
Отношение этих ЭДС равно коэффициенту трансформации
Ku |
E1 |
|
W1Kоб1 |
|
. |
|||
E |
2 |
W K |
об2 |
K |
|
|||
|
|
2 |
|
с |
||||
Приведенная обмотка ротора с приведенным током I создает
основную гармонику МДС, которая ориентирована в осевом направлении и имеет амплитуду
F2 m1
 2W1Kоб1 I2 .
2W1Kоб1 I2 .
πp
Неприведённая обмотка ротора создает основную гармонику МДС, которая ориентирована вдоль скошенных пазов ротора и имеет амплитуду
F2 m2
 2W2Kоб2 I2 .
2W2Kоб2 I2 .
πp
Это выражение не содержит коэффициента Kс , однако при вычислении потокосцепления взаимной индукции с обмоткой статора, создаваемого МДС F , надо учитывать коэффициент скоса Kс , так как МДС
F и создаваемый ею поток скошены относительно обмотки статора. По-
этому в отношении статора эффективной является МДС KсF2 и при приведении должнобыть соблюденоравенство
F2 KcF2.
Исходя из этого равенства и используя написанные выше выражения для F и F , найдем для коэффициента трансформации, или коэффициента приведения, токов
Ki I I
следующее выражение:
Ki m W Kоб .
m W Kоб Kс
Поскольку ротор может быть заторможен в любом положении и повёрнут вручную или с помощью вспомогательного двигателя, то оси обмоток статора и ротора будут занимать относительно друг друга различные положения Это относительное смещение осей обмоток статора и ротора вызывает
сдвиг по фазеЭДС, индуцируемых в обмотках вращающимся магнитным полем.
Это относительное смещение осей обмоток статора и ротора вызывает сдвиг по фазе ЭДС, индуцируемых в обмотках вращающимся магнитным полем.
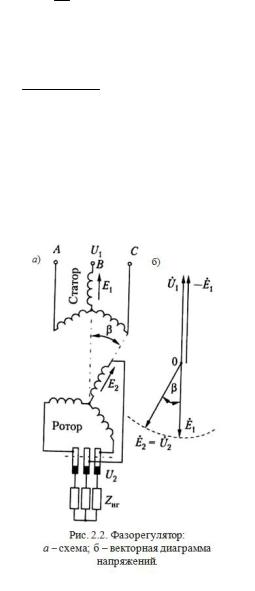
Если ротор повернуть в сторону вращения магнитного поля так, что оси фаз статора и ротора будут пространственно сдвинуты на угол
(рис. 2.2), то магнитное поле при своем вращении будет набегать сначала на фазу B статора,
а затем на фазу B ротора. Вследствие этого ЭДС фазы B будет от-
ставать от ЭДС фазы B на электрический угол
эл p (рис. 2.2). Изменяя положение ротора относительно статора,
можно изменять угол эл.
Такая машина называется фазорегулятором и представляет собой, в сущности, поворотный трансформатор с регулируемой фазой вторичного напряжения U относительно первичного U .
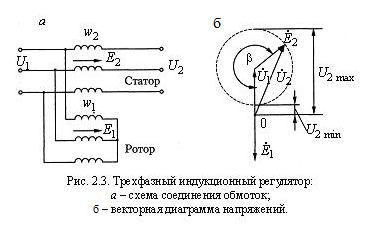
Асинхронную машину при заторможенном роторе можно включить по схеме автотрансформатора. При такой схеме включения она называется индукционным регулятором. Трехфазный индукционный регулятор служит для регулирования напряжения трехфазной сети переменного тока. Схема соединений обмоток наиболее широко применяемого трехфазного индукционного регулятора представлена на рис .2.3, а. Одна из обмоток W является первичной и включается па-
раллельно в сеть первичного напряжения U , а вторичная обмотка W включается в эту сеть последовательно.
В качестве первичной обмотки обычно используют обмотку ротора, так как при этом необходимо вывести с помощью контактных колец и щеток или гибких проводников только три конца обмотки. Первичная обмотка может быть включена как в звезду, так и в треугольник. Ниже для ясности будем иметь в виду соединение в звезду.
Первичная обмотка потребляет из первичной сети намагничивающий ток, который создает вращающийся поток . Если пренебречь падениями напряжения, то этот поток индуктирует в обмотках ЭДС E U . ЭДС E складывается с напряжением U под углом
(рис. 2.3, б), равным электрическому углу поворота фазы вторичной обмотки относительно первичной. При изменении концы векторов
E и U при U const скользят по окружности.
У регулятора одновременно с изменением величины напряжения
U2 меняется также его фаза, что иногда нежелательно.
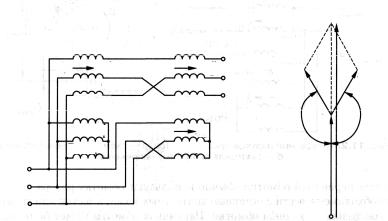
Втаких случаях можно применить сдвоенный индукционный регулятор (рис. 2.4), у которого первичные обмотки присоединены к первичной сети параллельно, а вторичные – последовательно друг с другом.
а |
|
|
|
б |
|
|
w2 |
w2 |
|
|
|
|
2 |
E2 |
|
|
|
|
U |
|
E2 |
U |
|
|
|
|
|
|
|
2 |
E |
|
2 |
|
|
|
|
|
2 |
||
Статор |
Статор |
|
E |
|
||
|
|
|
|
|||
w1 |
w1 |
|
|
|
|
|
|
|
|
|
|
||
E1 |
E1 |
|
|
|
|
|
Ротор |
Ротор |
|
|
|
|
|
U1 |
|
|
|
|
U |
|
|
|
|
|
|
1 |
|
|
|
|
|
0 |
|
|
Рис. 2.4. Сдвоенный трёхфазный индукционный регулятор:
а– схема соединений обмоток;б– векторная диаграмма напряжений
Оба регулятора укреплены на общем валу, и у второго регулятора на первичной и вторичной сторонах присоединения к двум фазам переменены местами. Вследствие этого магнитные поля двух регуляторов вращаются в противоположные стороны, и при повороте ротора одного регулятора по направлению вращения поля ротор другого поворачивается против направления вращения поля. Векторы вторичных
ЭДС регуляторов E и E на векторной диаграмме (рис. 2.4, б) пово-
рачиваются поэтому в противоположных направлениях, и при не учете падения напряжения фаза вторичного напряжения остается неизменной. Вращающий момент на валу сдвоенного регулятора равен нулю. Недостатком сдвоенного регулятора является наличие двух машин, что приводит к удорожанию установки.
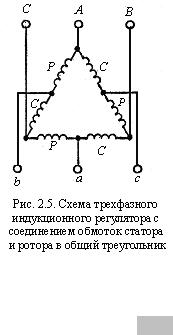
Не изменяющееся по фазе вторичное напряжение можно получить также в индукционном регуляторе с соединением фаз обмоток статора (с) и ротора ( р) в общий треугольник (рис .2.5), если числа витков
статора и ротора одинаковы. Первичное напряжение U const в таком регуляторе подводится к вершинам треугольника ABC, а вторичное U2 var отводится от средних точек а, б, с сторон этого тре-
угольника Не изменяющееся по фазе вторичное напряжение можно полу-
чить также в индукционном регуляторе с соединением фаз обмоток статора (с) и ротора ( р) в общий треугольник (рис .2.5), если числа
витков статора и ротора одинаковы. Первичное напряжение U const в таком регуляторе подводится к вершинам треугольника ABC, а вторичное U2 var отводится от средних точек а, б, с сторон этого тре-
угольника (рис. 2.5). Векторные диаграммы напряжений регулятора, изображенного на рис. 2.5, можно построить, учитывая, что ЭДС фаз
статора EC . и ротора EP одного и того же плеча треугольника
WсKоб.р WpKоб.р
равны по величине, сдвинуты по фазе на угол β поворота ротора
относительно статора и в сумме равны приложенному фазному напряжению:
U1 Eс Eр ..
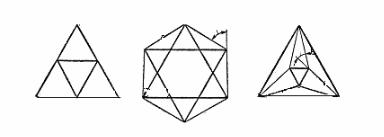
На рис. 2.6, а, б, в показаны векторные диаграммы регулятора, выполненного по схеме рис. 2.5, соответственно для случаев
0 , , .
a) |
A |
б) A |
|
в) |
A |
|
|
|
|
|
|
|
|
|
b |
b |
|
c |
|
c |
|
c |
|
b |
|
||
|
|
|
|
|||
|
|
|
|
|
|
|
C |
а |
B C |
|
B C |
а |
B |
|
|
|||||
|
|
|
||||
|
=0 |
|
а |
|
<0 |
|
|
|
|
|
>0
Рис. 2.6. Векторная диаграмма ЭДС инапряжений индукционного регулятора, выполненного по схеме рис. 2.5, при разных положениях ротора
Треугольники ABC представляют собой систему неизменных первичных напряжений. Векторы Cb, Ac, Ba – ЭДС фаз статора Eс и
векторы bA, cB, aC – ЭДС фаз ротора Eр . При повороте ротора сдвиг фаз между ЭДС Eс и Eр изменяется и одновременно изме-
няются также величины вращающегося потока и ЭДС Eс , Eр , так
что сумма ЭДС фаз одного и того же плеча треугольника остается неизменной
Eс EP U const.
Как видно из рис. 2.6, треугольник вторичных напряжений abc при этом меняется по величине, но при Eс Eр положение этого тре-
угольника и, следовательно, фаза вторичного напряжения не изменяются.
Принцип действия асинхронного двигателя. Обмотка статора асинхронного двигателя подключается к сети переменного тока. Под действием напряжения сети в ней протекает переменный ток, создаются МДС и вращающееся магнитное поле. Рабочий поток взаимной индукции проходит по ярму (спинке сердечника) и зубцам статора, через воздушный зазор, по зубцам и ярму ротора и замыкается через полюс другой полярности (см.рис. 2.2).
Магнитное поле при вращении пересекает проводники обмотки ротора, цепь которой всегда замкнута. В каждом проводнике при этом наводится ЭДС
eпр ВlVотн |
(2.1) |

где B — индукция в месте расположения проводника;
l — длина проводника; Vотн — линейная скорость перемеще-
ния поля относительно проводника ротора.
Полярность ЭДС, наводимой в проводнике, определяется по правилу правой руки. Под действием этой ЭДС в проводнике потечет ток iпр eпр . В результате его взаимодействия с вращающимся полем
статора появится тангенциальная сила Fпр , действующая па провод-
ник. Направление этой силы определяется по правилу юной руки. Проводники обмотки ротора распределены по пазам его сердеч-
ника на окружности с диаметром D . Произведение силы Fпр на ее
плечо — расстояние до оси вращения — равно электромагнитному моменту. Суммированием электромагнитных моментов тех проводников получают результирующий электромагнитный момент, действующий на ротор:
М FпрD ,
Z
где Z — число пазов ротора.
Ротор начинает вращаться под действием результирующего электромагнитного момента, если он больше момента сопротивления нагрузки. Естественно, механический момент нагрузки прикладывается к валу двигателя.
Поле статора всегда вращается с постоянной скоростью n , не
зависящей от нагрузки. Начав вращаться под действием электромагнитного момента, ротор будет «догонять» поле статора. Но скорость вращения ротора n не может стать равной синхронной скорости
вращения поля статора n . Рассмотрим, почему это так.
Ответ на этот вопрос имеет ключевое значение для понимания принципа работы асинхронного двигателя.
Предположим, что скорость n стала равна скорости n1 . Так как
Vотн n n , то при n =n ЭДС eпр [см. (2.1)], iпр , Fпр ,
М , поэтому ротор начнет останавливаться.
Таким образом, у асинхронного двигателя всегда n <n , т.е. ротор «отстает» от поля статора, вращаясь медленнее его и скользя отно-
сительно него. Это несинхронное вращение ротора и обусловило название «асинхронный двигатель».
Скорость скольжения ротора относительно поля статора
nск n -n . Обычно используется ее относительная величина, называемая скольжением асинхронного двигателя:
s |
nск |
|
n n |
. |
(2.2) |
n |
|
||||
|
|
n |
|
||
Скольжение иногда выражают в процентах: s% s. Отметим некоторые характерные значения скольжения.
1.При пуске асинхронного двигателя в первый момент после включения в сеть ротор еще неподвижен, т. е. n , s .
2.При холостом ходе асинхронного двигателя, т.е. при работе
без нагрузки на валу, скорость ротора n весьма близка к n1 (но не равна ей), следовательно, s 0.
3. Работе асинхронного двигателя с номинальным моментом нагрузки соответствует номинальное скольжение sном .
Вращающееся магнитное поле индуцирует в создавшей его обмотке статора ЭДС с частотой питающей сети. Частота ЭДС в обмотке ротора определяется скоростью ncк :
f |
S |
|
pnск |
|
p(n n ) |
|
psn |
sf , |
(2.3) |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где n n sn [см. (2.2)]
Следовательно, можно сделать следующий важный вывод: поле статора наводит в роторе ЭДС переменной частоты f S , которую на-
зывают частотой скольжения.
Преобразование частоты – одно из полезных свойств асинхронной машины, используемое на практике.
При пуске асинхронного двигателя частота ЭДС в роторе наи-
большая, т.к. при n2 0, s , а f2s f1. При холостом ходе f2s 0 , в номинальном режиме, согласно (2.3),
f2s 0,02 50 1Гц.

С такой же низкой частотой изменяется магнитный поток в сердечнике ротора, т.е. в нем практически отсутствуют потери в стали. Однако магнитопровод ротора делают шихтованным по следующим причинам:
пуски, торможения и другие переходные процессы (особенно если они происходят часто) сопровождаются изменением скольжения и частоты в роторе в широких пределах;
высшие пространственные гармоники поля перемагничивают сердечник ротора с частотами, зачастую даже превышающими частоту сети;
при штамповке листов электротехнической стали для сердечника статора внутреннюю часть вырубки можно использовать для шихтовки сердечника ротора. В противном случае ее пришлось бы отправлять в отходы.
В заключение отметим, что в теории электрических машин используются три вида скоростей двигателя: линейная V , м/с; угловая
, рад/с, или 1/с, или c 1; частота вращения n , об/мин. Напомним связь между ними:
v |
Dn |
; |
n |
. |
(2.4) |
|
|
||||
|
|
|
|
||
Из выражений (2.4) получаем
v D .
Асинхронный двигатель при холостом ходе. Холостым ходом называется работа двигателя без нагрузки на налу. При холостом ходе двигателя к обмотке статора подведено номинальное питающее напряжение, поле статора вращается с синхронной скоростью n , ско-
рость вращения ротора самая большая, скольжение почти равно нулю. Двигатель в этом случае преодолевает только незначительные моменты трения в подшипниках и щеток о контактные кольца (в двигателях с фазным ротором), момент сопротивления собственного вентилятора, находящегося на валу (см. рис. 1.2), и момент трения поверхности ротора о воздух. Сумму этих моментов называют моментом
холостого хода.
Электромагнитный момент в асинхронном двигателе создается и счет взаимодействия потока вращающегося магнитного поля с током ротора I т.е. M ~ ФI2 .