

Лекции / Лекция 13 Физические процессы в АМ
.pdfРабочий магнитный поток в асинхронном двигателе, как и в трансформаторе, определяется приложенным напряжением и практически одинаков при любой нагрузке. Для преодоления момента холостого хода достаточно маленького тока в роторе.
Связь между токами ротора и статора определяется соотношением, характерным и для трансформатора. Следовательно, при холостом ходе ток в каждой фазе обмотки статора I тоже мал и содержит на-
магничивающую (реактивную) составляющую и небольшую активную составляющую, обусловленную потерями холостого хода:
|
p10 p1э p1ст pмех mU1I10 cos 0 , |
(2.5) |
||
где |
p э – электрические потери в обмотке статора от тока холостого |
|||
хода; |
|
~U f ( , ... , ) |
|
|
p |
– потери в стали магнитопровода статора, p |
; |
||
ст |
|
ст |
|
|
Pмех – механические потери на трение, зависящие от скорости враще- |
||||
ния ротора; — угол между напряжением и током статора. |
|
|||
|
Потери p э определяются выражением |
|
|
|
|
p |
mI r , |
|
|
|
1э |
|
|
|
где r1 – активное сопротивление фазы обмотки статора.
Напомним, что вследствие малой частоты тока ротора в его сердечнике отсутствуют магнитные потери.
Проведем некоторые измерения в режиме холостого хода и используем полученные данные для разделения потерь (2.5) на составляющие. Для этого на обмотку статора подадим напряжение U изме-
няемое регулятором в пределах от , U ном до U min . Снижение на-
пряжения будем производить всето время, пока скорость вращения ротора остается постоянной, т.е. пока не изменяются механические потери Pмех . Электрические потери в обмоткевычислим с использованием
известного значения сопротивления r1.
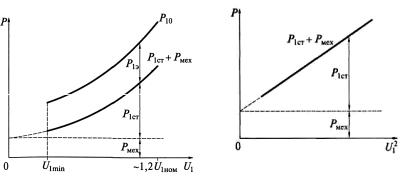
Рис. 2.13. Более точная экстраполяция кривой
P1ст Рмех , приведенной на рис. 2.12
Рис. 2.12. Разделение потерь холостого хода на составляющие
|
На рис.2.12 показаны зависимости P10 |
и разности |
|
|
|
||||
p |
p |
= p |
+ p |
мех |
от напряжения U . Так как P |
U |
|
, данная |
|
10 |
1э |
ст |
|
|
ст |
|
|
|
|
кривая представляет собой параболу, экстраполируя которую до пересечения с осью ординат, получим значение pмех , неизменное в преде-
лах всего графика, поскольку n const .
Точность экстраполяции будет выше, если построить график p cт pмех f (U ). Это будет прямая линия, которую надо продолжить до пересечения с осью ординат ((рис. 2.13.)
Асинхронный двигатель, имеющий нагрузку на валу. Замена вращающегося ротора неподвижным. В асинхронной машине при вращающемся роторе происходит преобразование электрической энергии в механическую, если она работает двигателем, и обратное преобразование, если она работает генератором. Кроме того, при вращающемся роторе частота тока в его обмотке отличается от частоты тока в обмотке статора. Этими особенностями асинхронная машина при вращающемся роторе отличается от трансформатора, в котором происходит преобразование электрической энергии в электрическую.
В то же время асинхронная машина при неподвижном роторе с точки зрения преобразования энергии полностью соответствует трансформатору. Поэтому возникает естественное желание заменить асинхронную машину при вращающемся роторе эквивалентной ей по энергетическим и электромагнитным процессам машиной при неподвижном роторе. Добиться этого можно, если при такой замене ток и его фаза в роторе и МДС. ротора F останутся неизменными.
Ток во вращающемся роторе при скольжении s

I s |
|
|
E s |
|
|
, |
|
|
|
|
|
|
|||
r |
|
x |
|
||||
|
|
|
|
||||
|
|
|
|
s |
|||
где r2 – активное сопротивление фазы обмотки ротора.
Электродвижущая сила E s представляет собой ЭДС, наводи-
мую в фазе ротора при скольжении s :
E2s 4,44f2sw2kоб2Ф
Учитывая, что f s f s , получаем
E s , f w kоб2 s =E s.
Электродвижущая сила E наводится в фазе неподвижного ро-
тора (s ). Следовательно, при заданном потоке ЭДС, индуцируемая в роторе при его вращении равна ЭДС E при неподвижном роторе, умноженной на скольжение. Индуктивное сопротивление рассеяния фазы ротора при скольжении s
x s f sL f L s x s,
где f L – индуктивное сопротивление рассеяния при неподвижном
роторе.
Откуда следует, что индуктивное сопротивление фазы ротора при его вращении равно индуктивному сопротивлению x при непод-
вижном роторе, умноженному на скольжение.
С учетом последних выражений получим ток в роторе
I2s |
|
|
E2s |
|
|
, |
|
|
|
|
|
||
r2 |
(x |
|
||||
|
|
2 |
s)2 |
|||
2 |
|
|
|
|||
Поделим числитель и знаменатель на скольжение s :
I2s |
|
|
|
|
E2 |
|
|
|
|
, |
|
|
|
|
|
|
|
|
|
||
r |
2 |
|
|
2 |
||||||
|
|
|
|
|
|
|||||
|
|
|
2 |
|
x |
2 |
|
|
|
|
|
|
s |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
Токи, полученные по последним двум формулам, имеют одинаковое значение. Одинаковыми будут углы их сдвига от ЭДС:
tg |
x |
|
x s |
tg |
. |
|
r /s |
r |
|||||
|
|
s |
|
|||
|
|
|
|
|
|
Однако между этими токами имеется принципиальное различие. Если ток I s обусловлен ЭДС E s и имеет частоту f s f s , то ток
I обусловлен ЭДС E и его частота равна f . Следовательно, ток
I s является током во вращающемся роторе, а ток I – в эквивалент-
ном неподвижном.
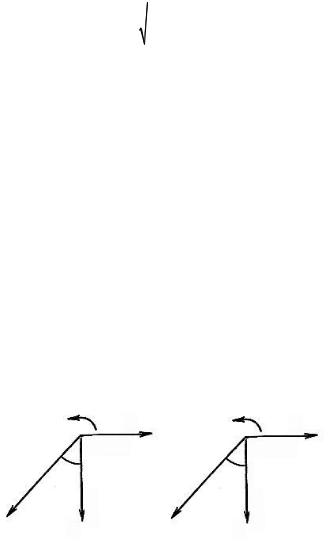
Векторные диаграммы вторичной цепи асинхронного двигателя при вращающемся роторе и эквивалентном неподвижном роторе изображены на рис. 2.14. В первом случае все векторы вращаются с угловой частотой f s f s, а во втором – с угловой частотой f ,
равной угловой частоте вращения векторов для цепи статора. Поэтому при неподвижном роторе оказывается возможным изображение на общей временной векторной диаграмме электрических величин для цепей статора и ротора.
|
2 f 2 |
|
|
2 f1 |
|
|
|
|
|
|
|
|
2S |
|
2 |
|
|
|
|
I |
|
|
|
I |
2S |
E |
S |
E |
|
|
2S |
а) |
б) |
||
|
|
|
S |
||
Рис. 2.14. Векторные диаграммы для вращающегося (а) и эквивалентного неподвижного (б) роторов
Так как токи I s и I равны по значению и фазе, то МДС, ими

созданные, также будут равны и одинаково ориентированы в пространстве, т.е. F S F Магнитодвижущая сила F s перемещается относительно ротора в направлении его движения с угловой скоростью
2 f2s 2 f1s 1s. p p
Так как скорость ротора ( s), то МДС F s при любых значениях скольжения s будет перемещаться в пространстве (относительно неподвижного статора) с угловой скоростью
s ( s) .
С такой же скоростью перемещается в пространстве МДС F
обмотки статора при протекании по ней тока с частотой сети. Следовательно, при любом значении скольжения МДС статора и ротора неподвижны относительно друг друга и будут создавать результирую-
щую МДС F0 :
F F F
откуда следует, что замена вращающегося ротора эквивалентным неподвижным не нарушает магнитное состояние машины. Таким образом, для перехода к эквивалентному неподвижному ротору следует у
заторможенного ротора активное сопротивление r заменить на |
r |
|
|
|
s |
|
для чего в его цепь вводится добавочное сопротивление rд , равное:
s r s .
Асинхронная машина с эквивалентным неподвижным ротором в электрическом отношении будет подобна трансформатору, работающему на чисто активную нагрузку.
Полная мощность, поглощаемая в эквивалентном неподвижном роторе
Pэм m I r . s
Эта мощность передается из статора в ротор электромагнитным

путем и носит название электромагнитной мощности. Часть этой мощности затрачивается на покрытие электрических потерь в обмотке ротора:
pэл2 m I r .
Остальная ее часть будет поглощаться в сопротивлении rд :
Рмх Рэм рэл2 m I r s .
s
В реальном вращающемся двигателе этой мощности будет соответствовать полная механическая мощность, которая получается в результате преобразования электрической энергии в механическую. В дальнейшем полная механическая мощность реальной асинхронной машины будет определяться по численно равным ей электрическим потерям в сопротивлении rд эквивалентного неподвижного ротора. Элек-
тромагнитный момент, развиваемыймашиной,
|
Рмх |
|
m I r |
( s) |
|
|
m I |
r |
|
|
Рэм |
|
|
|
|
|
|
|
|
|
|
|
|||||
М |
|
s |
|
|
s |
|
. |
||||||
|
( s) |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|||||
Это равенство показывает, что электромагнитный момент может быть найден делением полной механической мощности Рмх на угло-
вую скорость ротора или делением электромагнитной мощности Рэм на угловую скорость магнитного поля.
Приведение величин цепи ротора к обмотке статора. Приве-
дение величин, как и в трансформаторах, осуществляется для удобства сопоставления величин первичной и вторичной обмоток и изображения их в одном масштабе, а также для получения более простой схемы замещения для расчета характеристик.
Суть приведения состоит в том, что реальный ротор с числом фаз m и числом витков в обмотке w заменяется ротором, у которого
число фаз, число витков в обмотке и обмоточный коэффициент приняты такими же, как и у обмотки статора, при этом мощность, потери и МДС в приведенном роторе должны сохранить те же значения, что и в реальном роторе.
Параметры приведенного ротора обозначаются теми же символами, но со штрихом.

Определим соотношения между величинами в приведенном и реальном роторах.
Так как число витков приведенного ротора равно числу витков обмотки статора w w , то его ЭДС E2 изменится пропорционально
отношению w Kоб1 и будет равна ЭДС статора:
w Kоб2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
w K |
|
|
|
|
|
|
|
|
|
|
||
E2 E1 |
E2 |
|
1 об1 |
E2Ku . |
(2.6) |
|||||||||||||
w K |
||||||||||||||||||
|
|
|
|
|
|
2 |
об2 |
|
|
|
|
|
|
|||||
Присутствующие в коэффициенте трансформации KU |
обмоточ- |
|||||||||||||||||
ные коэффициенты Kоб1 |
и |
Kоб2 |
|
учитывают пространственное рас- |
||||||||||||||
пределение обмоток. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Соотношение между токами находим, исходя из равенства МДС: |
||||||||||||||||||
0,45m1 |
w1Kоб1 |
|
I2 0,45m2 |
|
w2Kоб2 |
|
I2 , |
|
||||||||||
|
p |
|
|
|
|
p |
|
|
|
|
||||||||
откуда |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I2 |
|
|
|
m2w2Kоб2 |
|
|
1 |
|
. |
(2.7) |
|||||||
|
I2 |
|
|
|
|
I2 |
|
|
|
|||||||||
|
m w k |
|
|
K |
i |
|||||||||||||
|
|
|
|
1 |
1 об1 |
|
|
|
|
|
|
|
|
|
||||
Активное сопротивление r найдем, приравняв электрические потери в обмотках роторов:
m I r m I r .
Подставив значение тока I из (2.7), получим
r2 r2kuki .
Для сохранения неизменным угла сдвига между ЭДС и током ротора необходимо, чтобы выполнялось равенство
x2 x2kuki .
Комплексное сопротивление приведенного ротора

z r jx .
При приведении величин обмотки ротора к обмотке статора следует иметь в виду, что для двигателей с фазным ротором число фаз ротора равно числу фаз статора: m m . Для короткозамкнутых двигателей число фаз ротора равно:
m2 Z2 . 2p
Число витков в фазе w2 1; kоб2 1.
Основные уравнения и векторная диаграмма асинхронной машины. Процессы, протекающие в асинхронной машине с эквивалентным неподвижным ротором, описываются системой уравнений, подобной системе уравнений для трансформатора.
В асинхронной машине первичной обмоткой является обмотка статора. Уравнение ЭДС обмотки статора
U |
E |
I |
z |
|
(2.8) |
|
|
|
|
|
где U – напряжение, подводимое к обмотке статора; E – ЭДС, наво-
димая в обмотке статора (2.6); z r jx – комплексное сопротивление обмотки статора, состоящее из активного сопротивления обмотки статора r и ее индуктивного сопротивления рассеяния x ; I – ток в
обмотке статора.
Уравнения напряжения эквивалентного неподвижного ротора
|
|
|
|
|
|
|
s |
|
|
|
|
|
|||
E |
|
I |
|
z |
|
I |
|
r |
|
I |
|
z |
s |
, |
(2.9) |
|
|
|
|
s |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где z r jx – комплексное сопротивление обмотки неподвижного
ротора; z s r jx . s
Уравнение МДС
F |
F |
F |
(2.10) |
|
|
|
|
Амплитуда первой гармонической МДС одной фазы равна
F |
|
2 2 |
|
WKоб1 |
I 0,9 |
WKоб1 |
I . |
|
|
|
|
||||
1(1) |
|
р |
|
р |
|||
|
|
|
|||||
Для m – фазной обмотки амплитуда первой гармонической МДС будет в m/ раз больше
|
F |
m |
|
WKоб |
I , |
m |
|
WKоб1 |
I . |
|
|
|
||||||
|
|
|
|
|
|
р |
|
|
|
|
р |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
С учетом этого уравнение (2.10) запишем в виде |
|
|
|
|||||||||||||||
|
w1Kоб1 |
|
|
|
|
w1kоб1 |
|
|
|
|
|
w2kоб2 |
|
|
||||
0,45m |
|
I |
0 |
0,45m |
|
I |
0,45m |
|
I |
2 |
(2.11) |
|||||||
|
|
|
||||||||||||||||
1 p |
|
|
|
1 p |
1 |
|
|
|
2 p |
|
|
|||||||
Здесь m и m – число фаз
обмоток статора и ротора соответственно.
Поделив обе части (2.11) на 0,45m1w1kоб1 / p , получим
уравнение для токов
I I I , |
(2.12) |
где I2 I2 m2w2Kоб2 . m1w1Kоб1
Электродвижущие силы E
и E индуцируются в обмотках
асинхронной машины основным потоком , являющимся потоком взаимной индукции. Этот поток создается результирующей МДС F . Ток I по своей сути является током возбуждения и
|
|
|
|
|
jI x |
|
|
|
|
U |
|
|
1 1 |
|
|
||
|
1 |
|
I |
r |
|
I |
||
|
|
|
|
|
1 1 |
|
1 |
|
|
|
|
|
|
|
1 |
|
I2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
I0 |
I0a |
|
|
|
r |
|
90 |
|
|
I |
|
|
|
|
|
|
||||
2 |
|
|
|
|
0ð |
|||
I2 |
|
|
|
|
|
|
|
|
s |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
I |
2a |
|
|
|
|
|
|
|
E |
E |
||
|
|
|
|
|
|
1 |
|
2 |
I2 |
|
|
|
|
I2 jx2 |
|||
|
|
|
|
|
|
|
||
|
|
|
I |
2ð |
|
|
|
|
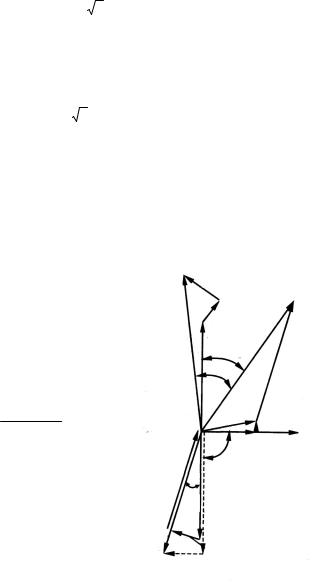
Рис. 2.15. Векторная диаграмма асинхронного двигателя
носит название намагничивающего тока.
Приложенное к обмотке статора напряжение U1 уравновешива-
ется ЭДС обмотки статора и падением напряжения в сопротивлениях обмотки. При изменении нагрузки от холостого хода до номинальной падение напряжения в сопротивлениях обмотки относительно мало и поэтому можно принять:
U E . f w Kоб ,
откуда следует, что если U const , то поток и создающий его ток I практически также должны оставаться постоянными.
При идеальном холостом ходе ( s ) ток I и I I . При s
в обмотке ротора появляется ток I , который будет стремиться изменить магнитный поток. Для сохранения магнитного потока неизменным первичная обмотка будет потреблять из сети кроме тока I также дополнительный ток I , уравновешивающий в магнитном отноше-
нии ток I . Поэтому в асинхронной машине при увеличении сколь-
жения одновременно с ростом тока I будет расти ток I .
Для практических расчетов можно принять, что ток I0 равен то-
ку при реальном холостом ходе машины, когда отсутствует тормозной момент на валу (s ).
Намагничивающий ток в асинхронной машине относительно большой и составляет 20 – 50 % номинального тока статора. Большое значение намагничивающего тока объясняется наличием воздушного зазора между статором и ротором, требующим для создания магнитного потока значительной МДС Для снижения намагничивающего тока воздушный зазор следует уменьшать.
При больших скольжениях, когда токи будут значительно превышать свои номинальные значения, падением напряжения пренебрегать нельзя.
Поэтому при U const с ростом тока ЭДС E поток и ток
I будут уменьшаться. При s поток примерно равен половине его значения при холостом ходе
Поэтому при U const с ростом тока ЭДС E поток и ток
I будут уменьшаться.
При s поток примерно равен половине его значения при холостом ходе.