

Лекции / Лекция 13 Физические процессы в АМ
.pdfПоток рассеяния σ сцеплен с обмоткой статора и индуцирует в ней ЭДС Eσ jI x . В обмотке ротора индуцируется ЭДС от сцеп-
ленного с ней потока рассеяния σ . Эта ЭДС равна Eσ jI x .
Поскольку потоки рассеяния замыкаются через относительно большие воздушные промежутки и насыщение магнитной цепи в рабочих режимах на них сказывается мало, то они и индуцируемые ими ЭДС будут пропорциональны соответствующим токам.
Векторная диаграмма асинхронного двигателя является графической иллюстрацией векторных уравнений (2.8) – (2.10). Поскольку уравнения асинхронного двигателя при неподвижном роторе совпадают с уравнениями трансформатора, то их векторные диаграммы также будут подобны друг другу.
Построение диаграммы удобно начинать с вектора потока
(рис. 2.15). Намагничивающий ток I опережает поток на угол .
Реактивная составляющая этого тока I μ по своей сути является
намагничивающей составляющей, так как она создает поток . Другая составляющая – активная I а обусловлена магнитными потерями в сердечнике статора, возникающими от переменного потока . Элек-
тродвижущие силы, индуцируемые в обмотках статора E и рото-
ра |
, отстают от потока на угол |
|
. Ток в цепи ротора |
I |
отстает от |
|||
|
||||||||
E |
|
|
|
|
2 |
|
|
|
|
E |
|
|
|
|
|
|
|
ЭДС |
на угол и в соответствии с (2.12) вызывает падения на- |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
пряжения в сопротивлениях |
2 |
и |
|
|
|
|
||
|
|
|
|
|||||
s |
x , которые будут уравновешивать |
|||||||
|
|
|
|
|
|
|
|
|
ЭДСE .
Ток I определяется по (2.13), а напряжение U – по (2.11). Угол
является углом сдвига между током I и напряжением U статора. Мощность, забираемая двигателем из сети, будет равна:
P m1U1I1cos 1 .
Схемы замещения асинхронной машины. Для расчета харак-
теристик асинхронной машины и исследования различных режимов ее работы удобно использовать схемы замещения. В схеме замещения
реальная асинхронная машина с электромагнитными связями между обмотками заменяется относительно простой электрической цепью, что позволяет существенно упростить расчет характеристик. При этом уравнения, описывающие рабочий процесс асинхронной машины, должны полностью соответствовать уравнениям для электрической цепи.
Уравнения асинхронной машины (2.8), (2.9), (2.12) запишем в следующем виде:
U |
I |
z |
m |
I z |
; |
|
(2.13) |
||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
r |
|
|
|
||
|
|
|
|
|
|
|
2 |
|
|
; |
(2.14) |
|
|
|
|
|
|||||||
0 I0zm |
I2 |
jx2 |
|||||||||
|
|
|
|
|
|
s |
|
|
|
||
|
I |
I |
I . |
|
|
(2.15) |
|||||
|
|
|
|
|
|
|
|
|
|
||
Здесь по аналогии с трансформатором принято
E1 E2 I0zm .
Решая эту систему относительно тока I1 , получаем
|
|
|
|
|
|
|
|
|
|
r 1 s |
|
|||
|
|
|
|
|
z |
z |
|
2 |
|
|
||||
|
|
|
|
|
|
|||||||||
|
|
z |
|
m |
2 |
|
|
|
s |
|
. |
|||
U |
I |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
r 1 s |
|||||||
1 |
1 |
|
1 |
|
|
|
|
|
|
|
||||
|
|
|
|
z |
m |
z |
|
|
2 |
|
|
|
||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
2 |
|
|
s |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
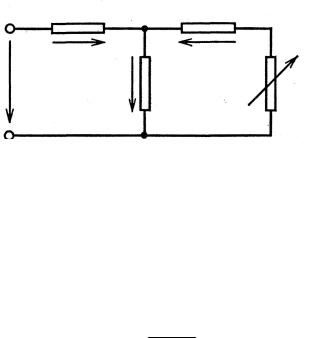
Выражению в квадратных скобках соответствует электрическая схема на рис. 2.16. Эта схема является схемой замещения асинхронной машины.
Сопротивление zm представляет собой сопротивление намагничивающей ветви схемы замещения. Индуктивная составляющая этого сопротивления xm обусловлена основным потоком и является индуктивным сопротивлением взаимной индукции.
Z |
Z2 |
|
1 |
|
|
I1 |
I2 |
|
U1 |
Z12 |
1 s |
|
r |
|
|
s |
|
|
2 |
Рис. 2.16. Т–образная схема замещения асинхронной машины
Посредством сопротивления rm учитываются магнитные потери
в сердечнике статора. Уравнение (2.13) для цепи статора соответствует левой части схемы замещения, а уравнение (2.14) для цепи ротора – правой части этой схемы. Для узловых точек справедливо уравнение
(2.15).
При расчете характеристик по схеме замещения ее параметры должны быть известны. Задаются скольжением s и определяют сопротивление
rд r2 1 s . s
Затем находят токи I1,I2, а по ним, определяют мощности,
электромагнитный момент, потери и т. д.
Изображенная на рис. 2.16 схема называется Т–образной схемой замещения .
Эта схема полностью отражает физические процессы, происходящие в машине, но она имеет узловую точку между сопротивлениями z и z . Узловая точка усложняет расчет токов при различных значе-
ниях скольжения.
Большое практическое применение для анализа асинхронных машин имеет другая схема замещения, в которой, намагничивающая
ветвь подключена непосредственно на напряжение U . Из схемы рис. 2.16 следует
|
|
U |
I z |
U |
|
z |
|
|||
|
|
1 |
1 |
1 |
1 |
1 |
|
|
||
I0 |
|
|
|
|
|
|
I1 |
|
. |
(2.16) |
|
zm |
|
zm |
zm |
||||||
Подставив (2.16) в (2.15), получим
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
z |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
I1 |
|
I1 |
|
|
I2, |
|
|||
откуда |
|
|
|
|
|
|
|
zm |
|
zm |
|
||||||||||
|
|
|
|
|
|
|
|
|
U1 |
|
|
I2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
I1 |
|
|
|
|
I00 I2, |
(2.17) |
|||
|
|
|
|
|
|
|
|
|
|
|
czm |
|
c |
||||||||
|
|
|
|
|
|
|
z1 |
|
c e j – комплексный коэффициент, |
|
|||||||||||
где |
c |
1 |
|
|
|||||||||||||||||
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
zm |
|
|
|
|
|
|
|
|
|
|
|
|
||
I00 |
|
U1 |
|
|
|
|
U1 |
|
– ток идеального холостого хода или ток син- |
||||||||||||
c |
z |
m |
z |
z |
|
||||||||||||||||
|
|
1 |
|
|
|
1 |
|
m |
|
|
|
|
|
|
|
|
|
||||
хронизма, т.е. ток, потребляемый машиной при синхронной скорости вращения ротора; s 0 (см. рис. 2.16.).
Выразим ток |
I |
через параметры схемы T образной схемы |
||||||||||||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
замещения. Согласно рис. 2.16. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
I |
I |
|
|
|
|
|
zm |
|
|
|
|
|
|
|
(2.18) |
||||||
|
|
|
|
|
|
|
|
r (1 s) |
||||||||||||||
|
|
2 |
1 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
z |
|
|
z |
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
m |
|
2 |
|
|
|
|
s |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Определив из схемы замещения ток I1 |
и подставив в (2.18), бу- |
|||||||||||||||||||||
дем иметь |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
||||
|
|
I |
|
|
|
|
|
1 |
|
|
|
|
|
|
. |
(2.19) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
r (1 s) |
|
|
|||||||
|
|
|
|
z |
c |
|
z |
|
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
1 |
|
|
2 |
|
|
|
|
s |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Учитывая (2.19), перепишем (2.17) в следующем виде: |
||||||||||||||||||||||
|
|
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
U |
|
|
||||
I |
I |
I |
|
1 |
|
|
|
|
|
|
|
1 |
|
, (2.20) |
||||||||
z z |
|
|
|
|
|
|
|
|||||||||||||||
1 |
00 |
|
2 |
|
|
|
|
|
c 2 |
|
|
|
|
|
r (1 s) |
|||||||
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
z |
к |
|
2 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
s |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где zk z1 z2. c1
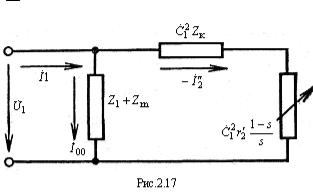
Уравнению (2.20) соответствует схема замещения, представленная на рис. 2.17
Ее называют Г – образной схемой замещения асинхронной машины.
При такой схеме токи I00 и I2 определяются независимо друг от друга делением напряжения U1 на сопротивление соответствующей ветви. При U1 const ток I00 является постоянной величиной и не
зависит от скольжения. Комплексный коэффициент
c |
1 |
z1 |
|
z1 zm |
(2.21) |
|
|
||||
1 |
|
zm |
|
zm |
|
|
|
|
|
имеет определенный физический смысл. Умножив числитель и знаменатель (2.21) на ток идеального холостого хода, получим
c |
|
z |
m |
z |
I |
U |
||||
|
|
|
|
1 |
00 |
|
1 |
. |
||
|
|
z |
|
I |
|
|
||||
1 |
|
|
|
m |
|
|
E |
|||
|
|
|
|
|
00 |
|
1 |
|
||
Таким образом, комплексный коэффициент c1 представляет собой отношение приложенного первичного напряжения к ЭДС, индуцируемой в обмотке статора при s 0.
Для машин мощностью от нескольких киловатт и выше модуль этого коэффициента равен c1 = 1,02–1,05, а аргумент γ 1 . Поэтому обычно принимают γ 0 , а комплексный коэффициент c1 заменяют модулем c1 .
При практических расчетах для машин средней и большой мощности можно принять c1 1.
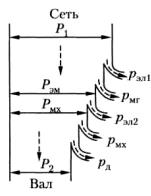
Энергетическая диаграмма асинхронного двигателя, его по-
тери и КПД. Преобразование активной мощности в асинхронном двигателе можно проиллюстрировать на энергетической диаграмме (рис.
2.18). Обмотка статора, включенная в сеть, потребляет из нее активную мощ-
Рис. 2.18. Энергетическая диаграмма асинхронного двигателя
ность Р1 . Часть этой мощности теряется в
виде электрических потерь в активном сопротивлении обмотки статора при протекании по ней тока. Другая часть мощности расходуется на магнитные потери в зубцах и ярме стали статора. Оставшаяся мощность посредством магнитного поля передается со статора в ротор. Эта мощность представляет собой электромагнит-
ную мощность
Р Р р |
эл.1 |
р |
m I |
2 |
r2 |
|
|||||
эм 1 |
ст.1 |
2 |
2 s |
||
Электромагнитная мощность частичнорасходуется на потери в роторе. Потерив ротореглавным образом состоят из электрических потерьв обмотке
рэл.2 m2I22r2 Pэмs
Магнитныепотерив роторемалы из–за небольшой частоты перемагничивания сталиипоэтомуих не учитывают.
Из рис. 2.18 видим, что полная механическая мощность Рмх равна
Рмх Рэм рэл.2 Рэм (1 s)

Полезная механическая мощностьР2 , снимаемая с вала двигате-
ля, будет меньше Рмх на значение механических потерь рмех (трение в подшипниках, вентиляцию) и добавочных потерь рд возникающих при нагрузке:
Р2 Рмх рмех рд .
Добавочные потери вызываются высшими гармониками магнитного поля, возникающими из–за зубчатого строения статора и ротора и из–за наличия высших гармоник МДС. При вращении ротора происходит перемещение его зубцов и пазов относительно зубцов и пазов статора, что вызывает колебание потока с высокой частотой. Вследствие колебаний поля возникают добавочные потери в стали на поверхности (поверхностные потери) и в теле зубцов (пульсационные потери) статора и ротора, которые пропорциональны квадрату тока.
Те же колебания потока индуцируют токи в обмотках, в связи с чем также появляются добавочные потери (потери в обмотках заметны главным образом в короткозамкнутых роторах). Добавочные потери трудно поддаются расчету и экспериментальному определению. Они обычно принимаются равными 0,5 % подводимой мощности при номинальной нагрузке. При других нагрузках эти потери пересчитываются пропорционально квадрату тока статора.
Коэффициент полезного действия
ηР2 .
Р1
Как уже отмечалось, КПД асинхронных двигателей достаточно высокий: от 0.7 до 0.95. С повышением мощности двигателя КПД увеличивается. Возрастает КПД также при увеличении частоты вращения.
Реактивная мощность в асинхронном двигателе. Физический процесс возбуждения асинхронного двигателя, т. е. образования в нем магнитного поля, такой же, как в трансформаторе, и, следовательно, тоже требует наличия реактивного намагничиваюнамагничивающего намагничивающего тока. Реактивная мощность, которую асинхронный двигатель забирает из сети для создания рабочего магнитного потока и потоков рассеяния,
θ1 m1U1Ι1 sin 1. |
(2.22) |
Произведение полного тока статора I1 на sin как раз и являет-
ся реактивной составляющей этого тока. Намагничивающим током машины называется геометрическая сумма (т. е. арифметическая разность) реактивных составляющих токов статора и ротора (см. рис. 2.16).
Из-за наличия воздушного зазора между статором и ротором намагничивающий ток в асинхронном двигателе значительно больше, чем в трансформаторе. Это легко объясняется законом Ома для магнитной цепи. Ведь с увеличением зазора растет его магнитное сопротивление, и для получения требуемого магнитного потока надо увеличивать МДС обмотки, т.е. намагничивающий ток.
Следовательно, асинхронные двигатели с большим числом полюсов имеют меньший cos 1, так как рабочий поток в машине пересе-
кает воздушный зазор 2p раз. Максимальное число полюсов у серий-
ных двигателей составляет 2p=12, несмотря на то что потребность в машинах с большим числом полюсов, конечно же, существует. Дело в том, что дальнейшее увеличение числа полюсов машины ведет к недопустимому росту ее намагничивающего тока и снижению cos 1 .
Это подтверждает и формула (2.22). Если 1 растет, увеличива-
ются sin и 1 , а cos падает.
Векторная диаграмма асинхронного двигателя (см. рис. 2.15) также показывает, что чем больше намагничивающий ток, т. е. реактивная составляющая тока холостого хода, тем ниже коэффициент мощности асинхронного двигателя в любом режиме. Следовательно, при номинальной нагрузке cos в асинхронных двигателях ниже, чем
в трансформаторах, и равен приблизительно 0,7 – 0,95. Со снижением нагрузки на валу cos 1, падает до значения, соответствующего холо-
стому ходу (cos 0 = 0,1 – 0,15).
Наибольшая часть потребляемой реактивной мощности идет на создание основного (рабочего) магнитного потока в воздушном зазоре двигателя. В соответствии со схемами замещения, показан-ными на рис. 2.17, 2.18
12 m1E1Ι1p m1Ι21p x12 m1Ι210x0.
На создание потоков рассеяния обмоток статора и ротора соответственно расходуются реактивные мощности
q1 m1Ι21x1;
q2 m2Ι22x2 m1(Ι'2 )2x'2 .
Уравнение баланса реактивных мощностей в асинхронном двигателе имеет вид
Q1 Q12 q1 q2 .
На основании изложенного понятно, почему в асинхронных машинах воздушный зазор между статором и ротором делают минимально возможным.
КПД и cos 1 являются энергетическими показателями асин-
хронного двигателя и в значительной степени определяют количество электроэнергии, которую он потребляет за время эксплуатации, т. е. энергетические показатели определяют экономичность и потребительский уровень качества асинхронных двигателей. Даже незначительное повышение энергетических показателей может обеспечить существенный экономический эффект, хотя бы потому, что асинхронные двигатели потребляют около 40 % всей вырабатываемой электроэнергии. Этим объясняется большое внимание, уделяемое в настоящее время различным методам компенсации реактивной мощности в асинхронных двигателях и созданию высокоэффективных машин с повышенным КПД.