

Артоболевский. Теория механизмов и машин. Задачи / Артоболевский. Теория механизмов и машин. Задача 197
.docx-
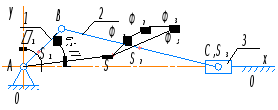
Предполагая, что все силы инерции звеньев приведены к общему центру масс S, определить точку приложения, модуль и направление главного вектора сил инерции подвижных звеньев кривошипно-ползунного механизма при φ1=45°, если lAB=50 мм, lBC=150 мм; координаты центров масс S1, S2 и S3 звеньев равны lAS1=20 мм, lBS2=75 мм, lCS3=0 мм, массы звеньев m1=2,5 кг, m2=1 кг, m3=1,5 кг. Угловая скорость кривошипа AB постоянна и равна ω1=100 с-1.
 ;
;
 .
.
 .
.
|
|
|
|
|
|
м/с |
5 |
3,64 |
4,39 |





 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
 .
.
|
|
|
|
|
|
|
|
|
|
|
|
|
м/с2 |
500 |
0 |
500 |
200 |
88 |
342 |
354 |
397 |
358 |
358 |











Сила инерции твёрдого тела пропорциональна ускорению тела и его массе. Направлена противоположно ускорению.
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Положение центра масс подвижных звеньев механизма определяется условием.
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Главный вектор сил инерции подвижных звеньев механизма равен сумме векторов сил инерции всех звеньев механизма.
 ;
;
 .
.