


Электромагнитные устройства автоматики.
К данной группе относят устройства, обеспечивающие коммутацию силовых и управляющих электрических цепей посредством механических контактов. К ним относят электромагнитное реле постоянного и переменного тока, поляризованное реле, магнитные пускатели, контакторы, переключатели силовых цепей и т. д.
Электромагнитное реле постоянного и переменного тока Реле. Общие сведения
Релейный элемент - переключательное устройство с двумя или более состояниями устойчивого равновесия, каждое из которых может скачком сменяться другим под влиянием внешнего воздействия (управления).
Реле – устройство для автоматической коммутации электрических цепей по сигналу управления. Реле в системах управления часто являются одновременно усилителями и управляющими элементами для электродвигателей и исполнительных устройств. Электрическое реле в общем случае является промежуточным элементом, приводящим в действие одну или несколько управляемых электрических цепей
Основными параметрами, характеризующими работу реле, являются мощность срабатывания,
мощность управления, время срабатывания.
а) Мощность срабатывания: Рср (Вт) - это минимальная электрическая мощность, которая должна
быть подведена к реле от управляющей цепи для его надежного срабатывания, т.е. приведения в действие управляющей цепи. Мощность срабатывания определяется общими электрическими и конструктивными параметрами реле.
б) Мощность управления: Рупр. (Вт) - это максимальная величина электрической мощности, коммутируемая в управляемой цепи. Рупр. определяется параметрами контактов реле, переключающих управляемую цепь. Выбор типа реле производится на основании значений Рср и Рупр, т.к. эти параметры постоянны для определенных конструкций реле.
в) Время срабатывания: Tср (сек) - интервал времени от момента поступления сигнала из управляющей цепи до замыкания контактов реле.
г) Допустимая разрывная мощность Рр (Вт) определяется для сильноточных реле, как мощность,
разрываемая контактами при определенном токе или напряжении без образования устойчивой электрической дуги.
Типы реле
Реле, применяемое в системах автоматики, можно классифицировать по различным принципам.
1.по назначению (управления, защиты и сигнализации);
2.по принципу действия:
а) электромеханические, электромагнитные нейтральные, электромагнитные поляризованные, магнитоэлектрические, электродинамические, индукционные, электротермические;
б) магнитные бесконтактные; в) электронные; г) фотоэлектронные; д) другие.
по замеряемой величине:
а) электрические: тока, напряжения, мощности, сопротивления, частоты, коэффициента мощности; б) механические: силы, давления, скорости, перемещения, уровня, объема; в) тепловые: температуры, количества тепла; г) времени и др.
по мощности управления:
а) маломощные с мощностью управления, Рупр 1Вт ; б) средней мощности, Рупр (1 10Вт ) ;
в) мощные, Рупр≥10Вт.

по времени срабатывания:
а) безинерционные tcp 0.001 сек ;
б) быстродействующие tср (0.001......0.05) ceк ;
в) замедленные tср = (0,15 1) cек tср (0.15......1) ceк ; г) реле времени tcp 1 сек .
Наиболее распространенными реле являются электромеханические, в которых изменение входной электрической величины вызывает механическое перемещение подвижной части реле (якоря), приводящее к замыканию или размыканию контактов реле. Наиболее широкое применение в устройствах автоматики, телемеханики и в вычислительной технике нашли электромагнитные реле.
Электромагнитные реле по роду используемого тока делятся на реле постоянного и переменного
тока.
Реле постоянного тока .
Достоинства: высокая чувствительность (мощность срабатывания |
10 |
5 |
||
|
||||
|
|
|
|
|
управления; малое время срабатывания (единиц миллисекунд).
Недостатки: сложность конструкции; большие габариты, вес и стоимость.
Вт); большой коэффициент
Реле переменного тока Недостатки реле переменного тока: худшие параметры (меньшее электромагнитное усилие,
меньшая чувствительность), сложность конструкции и дороговизна, применение специальных мер для устранения вибрации якоря.
Достоинство - непосредственное подключение к сети.
Контакторы и магнитные пускатели
Контакторы
Контактором называется электромагнитное реле с мощной контактной системой, для включения и отключения силовых цепей предназначенной в первую очередь для коммутации рабочих цепей электродвигателей. Главные контакты контакторов предназначены для работы в силовых цепях переменного тока промышленной частоты напряжением до 500 В. Главные контакты бывают, как замыкающими, так и размыкающими. Помимо главных контактов контакторы имеют дополнительные маломощные блокконтакты, которые используются для самоблокировки, включения удерживающих обмоток и коммутации дополнительных цепей. На схемах чтобы отличить главные контакты контактора от блок-контактов, их изображают более толстой линией.
Катушки контакторов используются для включения в цепи как переменного тока напряжением 127, 220 и 380 В, так и постоянного тока 24, 36, 110 или 220 В.
Контакторы большой мощности имеют дугогасительные средства.
Магнитные пускатели
Магнитный пускатель - это один из видов контакторов, предназначенный для пуска и остановки двух и трехфазных асинхронных двигателей. По типу магнитные пускатели делятся на реверсивные; и нереверсивные .
Литература:
Егоров В.С. Технические средства автоматизации и управления
Конспект лекций. - М.: МГОУ 2004. - 92с.




По виду регулируемого параметра автоматические регуляторы подразделяются на регуляторы температуры, давления, влажности, разряжения, расхода, состава и т. п.
По характеру изменения регулирующего воздействия автоматические регуляторы подразделяются на регуляторы с линейными и нелинейными законами регулирования. Примером регуляторов с нелинейным законом регулирования могут служить двухпозиционные регуляторы температуры в холодильных машинах. В трехпозиционных дискретных системах выходной сигнал может принимать три значения: –1, 0, +1, т.е.
“меньше”, “норма”, больше”. Качество работы таких САР выше, хотя их надежность ниже.
Регуляторы с линейным законом регулирования по математической зависимости между входными и выходными сигналами подразделяются на следующие основные виды:
—пропорциональные (П-регуляторы);
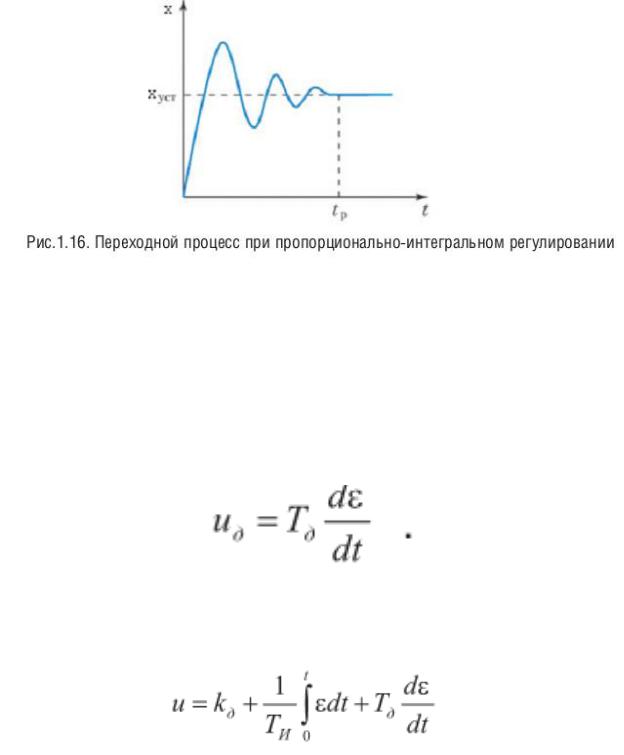
—пропорционально-интегральные (ПИ-регуляторы);
—пропорционально-дифференциальные (ПД-регуляторы);
—пропорционально-интегрально-дифференциальные (ПИД-регуляторы).
Для подавления помех и пульсаций сумма П- и Д-составляющих часто демпфируется фильтром с регулируемой постоянной времени.
При импульсном регулировании формирование ПИ-закона регулирования осуществляется совместно с интегрирующим исполнительным механизмом постоянной скорости.
В зависимости от вида используемой энергии регуляторы подразделяются на
электрические (электромеханические, электронные), пневматические, гидравлические и комбинированные.
Наиболее часто используемыми в различных отраслях промышленности являются электрические регуляторы. Пневматические и гидравлические регуляторы, как правило, применяются во взрыво- и пожароопасных зонах. В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой Wp. Изменение Wpадекватно ведет к изменению коэффициентов дифференциального уравнения общего передаточного звена (регулятор-объект) и тем самым достигается необходимое качество регулирования. В промышленных регуляторах эти величины называются параметрами настройки. Параметрами настройки являются: коэффициент усиления, зона нечувствительности, постоянная времени интегрирования, постоянная времени дифференцирования и т. д. Для изменения параметров настройки в регуляторах имеются органы настройки (управления).Кроме органов настройки основных параметров, регуляторы имеют также органы настройки, косвенно влияющие на эти коэффициенты или режимы его работы, например, органы настройки, изменяющие чувствительность регулятора, демпфирование входного сигнала и др.
Исходя из характера протекания процесса управления требования к системе формируются по следующим показателям:
—точность;
—устойчивость;
—качество переходного процесса.
Точность системы задается и определяется в установившихся режимах.
Устойчивость гарантирует затухание переходного процесса, после чего обеспечивается желаемое качествозатухающего переходного процесса.
1.2.КОРРЕКЦИЯ ДИНАМИЧЕСКИХ СИСТЕМ И ЗАКОНЫ РЕГУЛИРОВАНИЯ
Втех случаях, когда САР оказывается неустойчивой или когда качество ее работы не удовлетворяет поставленным требованиям, улучшение ее динамических свойств и повышение устойчивости в ряде случаев может быть достигнуто путем введения в систему последовательно со звеньями прямой цепи дополнительных функциональных блоков или же местных (локальных) обратных связей (ОС), которые обеспечивали бы получение управляющего сигнала в виде суммы сигнала рассогласования с дополнительными сигналами, характеризующими его производную, интеграл или иную функцию. Такие функциональные блоки называют корректирующими устройствами . Следует отметить, что наряду с формированием управляющего сигнала по ошибке может использоваться и внешнее воздействие (тоже с использованием соответствующих интегралов и производных).
Можно указать следующие общие пути обеспечения заданного качества работы САР в переходном и установившемся режимах:
—введение в прямую цепь усилителя с таким коэффициентом усиления, который рационально влиял бы на качество, как в переходном, так и в установившемся режимах;
—введение в прямую цепь интеграторов для обеспечения заданной точности работы САР в установившемся режиме:
—введение в прямую и обратную цепи системы дифференцирующих звеньев для обеспечения заданного качества работы в переходном режиме.
При использовании ПЛК чаще всего предполагается, что для коррекции применяются только те преобразования, которые заложены в типовые регуляторы («библиотечные» алгоритмы, функциональные блоки). Если библиотечные алгоритмы не позволяют осуществить те или иные законы регулирования (виды коррекции), то нужно использовать дополнительные преобразования. Речь идет о введении дополнительных функциональных преобразователей и включении их либо последовательно с основными звеньями контура регулирования, либо параллельно некоторым из них, либо комбинировании этих способов. Приведенные ниже сведения из теории автоматического регулирования позволяют использовать для коррекции системы преобразования, не входящие в состав стандартных регуляторов.
1.3. ВКЛЮЧЕНИЕ ФУНКЦИОНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
В ПРЯМУЮ ЦЕПЬ
Изменение общего коэффициента передачи/усиления (Кп) разомкнутой системы .Увеличение Кп– это способ повышения точности системы, при этом уменьшаются все виды установившихся ошибок системы.Однако нужно помнить, что увеличение Кп ведет к ухудшению условия устойчивости, а значит, и качества переходного процесса. При некотором Кп> Ккр(критическое значение) система становится неустойчивой. Поэтому
увеличение Кпцелесообразно делать одновременно с введением производной (рис.1.4). Введение производной от ошибки (как в чистом виде, так и с инерционностью) представляет собой простейший способ улучшения качества переходного процесса .
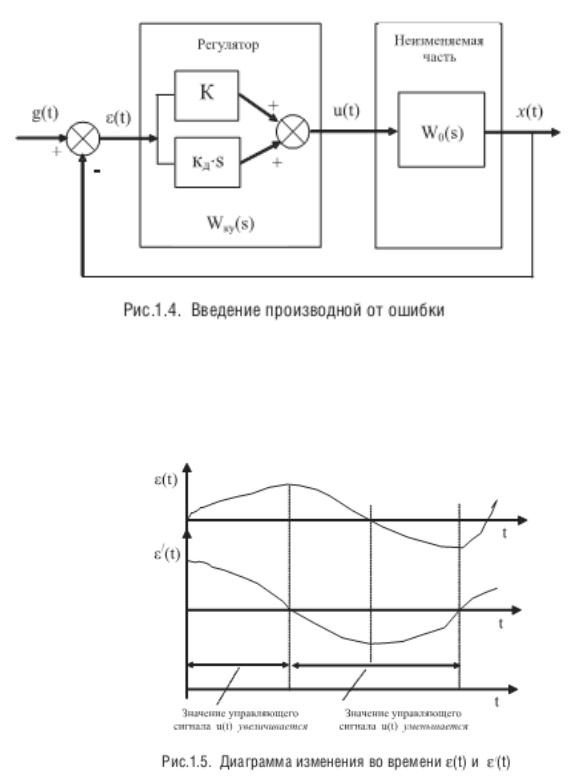
производнойсигнала рассогласования, осуществимом посредством последовательного включения в контур регулирования дифференцирующего звена.Построив амплитудно-фазовые характеристики исходной системы и той же астатической системы с последовательно включенным дифференцирующим звеном, можно установить, что добавление производной сигнала рассогласования приводит к повышению запаса устойчивости системы по фазе при одновременном снижении инерционности ее звеньев. Это позволяет значительно увеличить коэффициент усиления, сохранив прежний запас устойчивости, или обратить неустойчивую систему в устойчивую. Кроме того, динамические ошибки системы уменьшатся, а ее быстродействие возрастет. В статических САР введение дополнительного воздействия по производной сигнала рассогласования также улучшает качество работы системы, т.к. ее инерционность уменьшается.
Введение интеграла от ошибкипредставляет собой метод повышения порядка астатизма системы, а значит, и увеличения ее точности. Однако при этом осуществляется отставание (отрицательный сдвиг) по фазе на –90о, что ухудшает условия устойчивости и качество переходного процесса. Если регулирование с воздействием по производной сигнала рассогласования снижает динамические ошибки системы, то введение дополнительного воздействия по интегралу сигнала рассогласования приводит к уменьшению статических ошибок систем. Для осуществления коррекции последовательно со звеньями системы включают интеграторы. Построив логарифмические АФЧХ исходной системы и той же системы с последовательно включенным интегрирующим звеном, можно убедиться, что регулирование с воздействием по интегралу сигнала рассогласования увеличивает коэффициент усиления системы, особенно на низких частотах при одновременном снижении статических ошибок. Однако при этом уменьшается быстродействие системы и ее запас устойчивости. Для устранения этого недостатка применяют комбинированную коррекцию с воздействием по интегралу и по производной сигнала рассогласования.
Введение изодромной коррекции вида объединяет в себевведение интеграла и производной. Оно позволяет избежать недостатков предыдущей коррекции и получать необходимый порядок астатизма системы, сохраняя устойчивость и качество системы в переходном режиме. Следовательно, если в случаепростого введения интеграла регулирование в системе производится не по величине ошибки, а только по интегралу от нее, то при изодромном устройстве мы получаем регулирование по ошибке и по интегралу (аналогично тому, как это было показано при регулировании по ошибке и по ее производной).
1.4. ВКЛЮЧЕНИЕ ФУНКЦИОНАЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
ПАРАЛЛЕЛЬНО НЕКОТОРЫМ ЗВЕНЬЯМ КОНТУРА РЕГУЛИРОВАНИЯ – МЕСТНЫЕ
ОБРАТНЫЕ СВЯЗИ (ОС
Основные виды ОС:
-жесткая ОС (действует на систему как в переходном, так и установившемся режимах);
-инерционная жесткая ОС;
-гибкая ОС (действует только в переходных режимах);
-инерционная гибкая ОС.
Местные жесткие ОС (ЖОС) применяют для повышения устойчивости системы . ЖОС действует на систему как в переходном, так и установившемся режимах: цепь ЖОС содержит только безынерционные элементы (обозначим коэффициент ОС как Кос), благодаря которым выходной сигнал этой цепи (звена 4 на рис.1.6) в любом режиме работы системы всегда прямо пропорционален выходному сигналу звена, охваченного этой связью (звено 2).






«АСУ ТП ГЭС» лекция №5 Составил преподаватель СШФ СФУ А.М. Волошин
Нижний уровень АСУТП ГЭС: контроллеры и промышленные сети
Программируемые логические контроллеры (ПЛК) уже давно и прочно заняли свою нишу на рынке средств автоматизации. Развитие полупроводниковой элементной базы, разработка новых средств информационного обмена, развитие алгоритмов управления способствует тому, что линейка ПЛК непрерывно расширяется. Многообразие ПЛК с различными функциональными и техническими, конструктивными характеристиками настолько велико, что разработчики систем автоматизации зачастую оказываются перед нелегким выбором: какой контроллер наилучшим образом подойдет для решения той или иной задачи.
Структура ПЛК
Первые ПЛК появились в 1967 г. и были предназначены для локальной автоматизации наиболее часто встречающихся в промышленности технологических задач, которые описывались преимущественно логическими уравнениями. ПЛК с успехом заменили блоки релейной автоматики и устройства жесткой логики на интегральных микросхемах малой и средней степени интеграции. Отсюда и название — программируемый логический контроллер, или Programmable Logic Controller (PLC). Аппаратные средства, программное обеспечение и конструктивное исполнение ПЛК должны удовлетворять следующим требованиям:
• универсальная структура изделия, которая позволяет свести каждую новую разработку к выбору среди существующих аппаратных средств и разработке новой управляющей программы;
•высокая надежность;
•удобство обслуживания и эксплуатации;
• простое программирование и перепрограммирование устройства (возможно не специалистом в области компьютерной техники);
•стандартизация входов и выходов для непосредственного подключения датчиков и исполнительных устройств;
•меньшие габариты и энергопотребление, чем у аналогичных блоков релейной автоматики и жесткой логики;
•конкурентоспособность по стоимости со схемами на основе релейной техники, жесткой полупроводниковой логики, возможность обмена информацией с системой управления верхнего уровня. Тридцатилетний опыт технического развития и эксплуатации привел к выделению ПЛК в отдельный класс микропроцессорных систем. ПЛК представляют собой
завершенную форму микропроцессорных средств, которые характеризуются оригинальной архитектурой и специальным программным обеспечением. Реализованные решения в области аппаратных и программных средств преследуют цель обеспечения максимально возможного уровня надежности при работе в промышленных условиях эксплуатации. Весь комплекс этих решений можно подразделить на следующие функциональные группы:
•специальная архитектура центрального процессора ПЛК;
•использование различных способов резервирования;
•использование программных методов защиты информации;
•специальная схемотехника УСО;
•организация специальных быстродействующих магистралей связи с удаленными УСО;
•специальное конструктивное исполнение.
Структура ПЛК, подключенного к объекту управления, показана на рисунке ниже. Центральный процессор (CPU) включает собственно микропроцессор, память программ и память данных, формирователи

исполнительным устройством. Стандартные параметры выходов следующие: постоянное напряжение 24 В, переменное напряжение 130 В и 240 В при силе тока до 10 А. Выходным устройством могут быть биполярные или полевые транзисторы, реле, триод, тиристор. Гальваническая развязка обеспечивается разделительным трансформатором па переменном токе или оптронами на постоянном токе. ПЛК непрерывно развивались в сторону усложнения. Постепенно, не изменяя названия, они стали выполнять функции регулирования. В составе ПЛК появились адаптеры ввода аналоговых сигналов, содержащие АЦП, и адаптеры вывода аналоговых сигналов на основе ЦАП. Система команд ПЛК пополнилась командами обработки двоичных кодов, ПЛК стали выполнять операции сравнения и алгебраические вычисления.
Классификация современных контроллеров
Определение для каждого контроллера его классификационных особенностей, его места среди прочих контроллеров позволит с большей точностью сказать, подходит ПЛК для решения данной конкретной задачи или нет.
Страна-производитель
Некоторое время назад это был очень важный классификационный признак. Считалось, что контроллеры, произведённые в Европе, Америке и Японии, гораздо надежнее, обладают гораздо большим функционалом, чем их «коллеги» из Юго-Восточной Азии и России. В настоящее время этот классификационный признак, скорее всего, потерял актуальность. По сути, границы между производителями электроники постепенно исчезают вообще.На что действительно следует обратить внимание, так это на то, учтена ли при разработке контроллера российская специфика его эксплуатации. К российской специфике можно отнести:
высокий уровень промышленных помех;
широкий диапазон изменения параметров атмосферной и промышленной сред;
возможность информационной связи с рядом морально устаревших, но ещё находящихся в
эксплуатации средств автоматизации выпуска российских предприятий 80-х годов; Контроллеры российского производства учитывают российскую специфику их эксплуатации. Но и зарубежные
производители также стали адаптировать свои приборы под наши условия, пытаясь занять часть российского рынка. Поэтому страну производитель, как серьезный фактор классификации рассматривать не стоит.
Мощность
Под обобщённым термином «мощность» понимается разрядность и быстродействие центрального процессора, объём разных видов памяти, число портов и сетевых интерфейсов. Очень часто основным показателем, косвенно характеризующим мощность контроллера и, одновременно, являющимся важнейшей его характеристикой, является число входов и выходов (как аналоговых, так и дискретных), которые могут быть подсоединены к контроллеру. По этому показателю контроллеры подразделяются на следующие классы:
наноконтроллеры (часто с встроенными функциями), имеющие до 15 входов/выходов;
малые контроллеры, рассчитанные на 15-100 входов/выходов;
средние контроллеры, рассчитанные примерно на 100-300 входов/выходов;
большие контроллеры, рассчитанные примерно на 300-2000 входов/выходов;
сверхбольшие контроллеры, имеющие примерно от 2000 и более входов/выходов.
Очень важно отметить, что с ростом мощности контроллера растёт его цена. Причем при переходе разница по цене между различными классами контроллеров очень значительна. Одна из задач при разработке системы управления – это чётко зафиксировать число входных и выходных сигналов объекта управления, чтобы избежать лишних затрат при выборе контроллера.
Область применения
Область применения – один из наиболее важных признаков классификации. Область применения контроллера накладывает целый ряд требований к контроллерам и очень сильно сужает круг поиска при разработке систем управления.
1. Специализированный контроллер со встроенными функциями
Обычно им является минимальный по мощности контроллер, программа действия которого заранее прошита в его памяти, а изменению при эксплуатации подлежат только параметры программы. Число и набор модулей ввода/вывода определяется реализуемыми в нем функциями. Часто такие контроллеры реализуют различные варианты функций регулирования. Основные области применения: локальное управление какойлибо малой технологической установкой или механизмом.
2. Контроллер для реализации логических зависимостей (коммандоаппарат)
Главные сферы применения такого контроллера: станкостроение, машиностроение, замена релейноконтактных шкафов во всех отраслях промышленности. Он характеризуется прошитой в его памяти развитой библиотекой логических функций и функций блокировки типовых исполнительных механизмов. Для его программирования используются специализированные языки типа релейно-контактных схем. Набор модулей ввода/вывода у такого контроллера рассчитан, в основном, на разнообразные дискретные каналы. Наиболее простыми представителями данного класса контроллеров являются интеллектуальные реле.
3. Контроллер, реализующий любые вычислительные и логические функции
Наиболее распространённый универсальный контроллер, не имеющий ограничений по области применения. Центральный процессор контроллера имеет достаточную мощность, разрядность, память, чтобы выполнять как логические, так и математические функции. Иногда, для усиления его вычислительной мощности, он снабжается ещё и математическим сопроцессором (во многих современных процессорах математический сопроцессор интегрирован в сам кристалл). Инструментальные средства для программирования таких контроллеров, как правило, поддерживают несколько языков программирования, таких как язык релейноконтактных схем, функционально-блоковых диаграмм, язык С, Basic, Pascal и тому подобные. Как правило, также предоставляется большая библиотека уже реализованных логических, математических и коммуникационных функций. В состав модулей ввода/вывода входят модули на всевозможные виды и характеристики каналов (аналоговых, дискретных, импульсных и т. д.).
4. Контроллер противоаварийной защиты
Он должен отличаться от контроллеров других классов:
особенно высокой надежностью, достигаемой различными вариантами диагностики и резервирования (например, диагностикой работы отдельных компонентов контроллера в режиме реального времени, наличием основного и резервного контроллеров с одинаковым аппаратным и программным обеспечениями и с модулем синхронизации работы контроллеров, резервированием блоков питания и коммуникационных шин);
высокой готовностью, т. е. высокой вероятностью того, что объект находится в рабочем режиме (например, не только идентификацией, но и компенсацией неисправных элементов; не просто резервированием, но и восстановлением ошибок программы без прерывания работы контроллеров);
отказоустойчивостью, когда при любом отказе автоматизируемый процесс переводится в безопасный
режим функционирования.
Контроллер цепи противоаварийной защиты должен иметь сертификат, подтверждающий безопасность его работы в цепях противоаварийной защиты.
5. Контроллер телемеханических систем автоматизации
Данный класс универсальных контроллеров удобен для создания систем диспетчерского контроля и управления распределёнными на местности объектами. В контроллерах данного класса повышенное внимание уделяется программным и техническим компонентам передачи информации на большие расстояния беспроводными линиями связи.
Открытость архитектуры
По структуре контроллеры подразделяются на два класса: контроллеры, имеющие фирменную закрытую структуру, и контроллеры открытой структуры, основанной на одном из магистрально-модульных стандартов.
При закрытой фирменной структуре изменения (модификации) контроллера возможны, обычно, только компонентами производителя. Сами изменения достаточно ограничены и заранее оговорены производителем.
При открытой магистрально-модульной структуре, имеющей стандартный интерфейс для связи центрального процессора с другими модулями контроллера, ситуация кардинально меняется:
открытость и широкая доступность стандарта на шину, соединяющую модули разного назначения, даёт возможность выпускать в данном стандарте любые модули разным производителям, а разработчикам контроллеров даёт возможность компоновать свои средства из модулей разных фирм; возможность любой модификации и перекомпоновки средств путем замены в них отдельных модулей, а не замены самих средств, удешевляет эксплуатацию средств;
сборка контроллеров из готовых модулей позволяет точнее учитывать конкретные технические требования и не иметь в них лишних блоков и элементов, не нужных для данного конкретного применения; широкая кооперация разных фирм, поддерживающих данный стандарт на шину и работающих в этом
стандарте, позволяет пользователям модулей не быть привязанными к конкретному поставщику и иметь широкий выбор необходимой ему продукции.
PC-совместимость
По этому признаку все контроллеры можно разделить на два класса: PC-совместимые и PC-несовместимые. Каждый из этих классов имеет свои достоинства и недостатки.
PC-совместимые контроллеры можно охарактеризовать следующими особенностями:
они имеют классическую открытую архитектуру IBM PC;
в них используется элементная база, та же, что и у обычных PC;
они работают под управлением тех же операционных систем, которые широко используются в персональных компьютерах, например Windows, Unix, Linux, QNX;
программируются они теми же языками, которые используются для разработки ПО для PC;
на них, как правило, возможна работа программного обеспечения, разработанного для персональных компьютеров, при наличии требуемых для ПО аппаратных ресурсов.
PC-несовместимые контроллеры можно охарактеризовать так:
архитектура контроллеров закрыта, она, как правило, является ноу-хау разработчика;
элементная база, на которой строятся контроллеры, существенно отличается от используемой в PC, она разная у разных производителей;
операционные системы, под управлением которых работают контроллеры, совершенно другие, нежели те, которые используются в РС, они часто разрабатываются самими производителями именно для данного типа или линейки контроллеров;
так как в таких контроллерах практически не используются стандарты, предлагаемые разработчиками
распространённых операционных систем для PC, то работа PC-программ на этих контроллерах оказывается невозможной.
Из рассмотренных выше характеристик можно сделать вывод о сравнительных достоинствах и недостатках РС-совместимых и несовместимых контроллеров. РС-совместимые контроллеры по сравнению с РС-
несовместимыми контроллерами в целом обладают большей мощностью, легче стыкуются с различными SCADA, MES, ERP системами, системами управления базами данных, открыты для большинства стандартов в областях коммуникаций и программирования, они в среднем дешевле, проще обслуживаются и ремонтируются.
В то же время РС-несовместимые контроллеры лучше учитывают требования промышленной
автоматики; их операционные системы гарантируют отклик контроллера на внешнее событие через заданное время (операционные системы реального времени). Они в целом более надежны, так как больше используют наработанные в промышленности способы диагностики и горячего резервирования, обеспечивающие отказоустойчивость системы в целом. В них шире используются возможности связи с различными полевыми шинами.


Контроллеры модульного типа
Контроллеры модульного типа не используют общего конструктива. Каждый модуль таких контроллеров, будь то процессорный модуль или модуль ввода-вывода, имеет собственный корпус. Так как защитную оболочку для каждого модуля сделать проще, чем для всего контроллера, то именно этот тип контроллеров чаще всего выпускают для жёстких условий эксплуатации в исполнениях IP 67 и выше.
Контроллеры модульного типа очень часто выпускают в корпусе для монтажа на рейку DIN NS 35/7,5. Можно выделить две разновидности контроллеров: с внутренней межмодульной шиной и с внешней шиной. Модули контроллеров с внутренней межмодульной шиной на боковых поверхностях имеют контакты для подключения соседних модулей. А модули контроллеров с внешней шиной, как правило, используют для связи между модулями какую-нибудь скоростную полевую шину, например CAN.
В качестве примера на рисунках ниже показаны контроллеры с внутренней шиной и модули контроллера с внешней шиной, приспособленные для эксплуатации в жёстких условиях.
Операционная система ПЛК
Память программ ПЛК состоит из двух сегментов.
Первый сегмент — неизменяемая часть, которая содержит ОС ПЛК. По существу, это — интерпретатор инструкций программы пользователя, которые размещаются во втором сегменте памяти — сегменте программы управления.
Второй сегмент - это изменяемая часть программы. Она заносится на этапе адаптации серийного изделия для управления конкретным объектом. ПЛК отличается циклическим характером работы. Каждый цикл выполнения программы управления включает четыре этапа . На первом этапе происходит тестирование аппаратуры ЦП. Если тест дает удовлетворительные результаты, производится запуск цикла. На втором этапе осуществляется опрос всех входных переменных и запоминание их состояния в специальной области оперативной памяти данных, называемой PII ( Process Input Image -
образ состояния входных переменных). На третьем этане ЦП производит вычисление логических выражений, составляющих программу пользователя, используя в качестве аргументов состояние входных образов и внутренние переменные.

2.Поддержка больших расстояний. Это существенное требование, ведь расстояние между объектами управления может порой достигать нескольких километров. Применяемый протокол должен быть ориентирован на использование в сетях большой протяженности.
3.Защита от электромагнитных наводок. Длинные линии в особенности подвержены пагубному влиянию электромагнитных помех, излучаемых различными электрическими агрегатами. Сильные помехи в линии могут исказить передаваемые данные до неузнаваемости. Для защиты от таких помех применяют специальные экранированные кабели, а также оптоволокно, которое, в силу световой природы информационного сигнала, вообще нечувствительно к электромагнитным наводкам. Кроме этого, в промышленных сетях должны использоваться специальные методы цифрового кодирования данных, препятствующие их искажению в процессе передачи или, по крайней мере, позволяющие эффективно детектировать искаженные данные принимающим узлом.
4.Упрочненная механическая конструкция кабелей и соединителей. Здесь тоже нет ничего удивительного, если представить, в каких условиях зачастую приходится прокладывать коммуникационные линии. Кабели и соединители должны быть прочными, долговечными и приспособленными для использования в самых тяжелых условиях (в том числе в агрессивных атмосферах, в условиях повышенного уровня вибраций, влажности).
По виду физической среды передачи данных полевые шины делятся на два типа:
1.Полевые шины, построенные на базе оптоволоконного кабеля. Преимущества использования оптоволокна очевидны: возможность построения протяженных коммуникационных линий (протяженностью до 10 км и более); большая полоса пропускания; нечувствительность к электромагнитным помехам; возможность прокладки во взрывоопасных зонах. Недостатки: относительно высокая стоимость кабеля; сложность физического подключения и соединения кабелей. Эти работы должны выполняться квалифицированными специалистами.
2.Полевые шины, построенные на базе медного кабеля. Как правило, это двухпроводной кабель типа “витая пара” со специальной изоляцией и экранированием. Преимущества: приемлемая цена; легкость прокладки и выполнения физических соединений. Недостатки: подвержен влиянию электромагнитных наводок; ограниченная протяженность кабельных линий; меньшая по сравнению с оптоволокном полоса пропускания.
Промышленные сети обычно не выходят за пределы одного предприятия. В настоящее время насчитывается более 50 типов промышленных . сетей(Modbus,Profibus,DeviceNet, CANopen, LonWorks,ControlNet, SDS, Seriplex, ArcNet, BACnet, FDDI, FIP, FF, ASI, Ethernet, WorldFIP, Foundation Fieldbus, Interbus, BitBus и др.).
Однако широко распространенными является только часть из них. В России подавляющее большинство АСУ ТП используют сети Modbus иProfibus.В последние годы возрос интерес к сетям на основе CANopen и
DeviceNet.
Соединение промышленной сети с ее компонентами (устройствами, узлами сети) выполняется с помощью
интерфейсов. Сетевым интерфейсом называют логическую и (или) физическую границу между устройством и средой передачи информации. Обычно этой границей является набор электронных компонентов и связанного с ними программного обеспечения. При существенных модификациях внутренней структуры устройства или программного обеспечения интерфейс остается без изменений, что является одним из признаков, позволяющих выделить интерфейс в составе оборудования.
Наиболее важными параметрами интерфейса являются пропускная способность и максимальная длина подключаемого кабеля. Промышленные интерфейсы обычно обеспечивают гальваническую развязку между соединяемыми устройствами. Наиболее распространены в промышленной автоматизации последовательные интерфейсы RS-485, RS-232, RS-422, Ethernet, CAN, HART, AS-интерфейс.
Интерфейсы
Интерфейс "токовая петля"




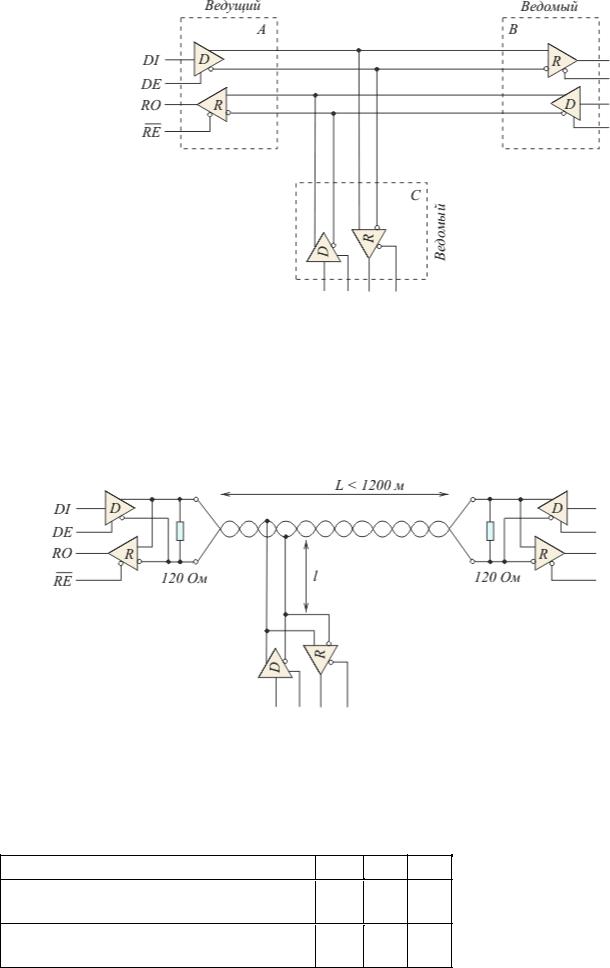

Рис..6.1Сетеваятопологиязвезда
передаетсятолькоцентральномукомпьютеру,отцентрального—одномуилинесколькимпериферийным. причемкаждыйизнихиспользуетотдельнуюлиниюсвязи.Информацияотпериферийногокомпьютера Звезда(star)—кодномуцентральномукомпьютеруприсоединяютсяостальныепериферийныекомпьютеры,
ваяСететопологияшина
компьютераодновременнопередаетсявсемостальнымкомпьютерам. Шина(bus)—всекомпьютерыпараллельноподключаютсякоднойлиниисвязи.Информацияоткаждого Существуеттрибазовыетопологиисети: связейможнолегкопроследить. Важноотметить,чтопонятиетопологииотносится,преждевсего,клокальнымсетям,вкоторыхструктуру физическоерасположениекомпьютеровсетидруготносительнодругаиспособсоединенияихлиниямисвязи Подтопологией(компоновкой,конфигурацией,структурой)компьютернойсетиобычнопонимается Топологиялокальныхсетей. которыхониобмениваютсяинформацией. совокупностьвычислительныхустройств,связанныхлиниямииоборудованиемсвязи,посредством еПромышленнысети,какчастныйслучайлокальныхвычислительныхсетей,-этоограниченная Промышленныесети
названиеfieldbus(полеваяшина,илипромышленнаясеть.) функционирующейнанижнемуровнесистемыавтоматизациирядомстехнологическимпроцессом,получил Появлениецифровыхинтерфейсовсделалопереходклокальнойсетипочтинеминуемым.Этотвидсети, вспомогательнымиустройствами(например,барьерамиискрозащиты.)
исвязи линией вносимые ,погрешности и ,преобразования цифроаналогового дополнительного погрешности
иустраняет виде цифровом в информации передача ,Наконец .самодиагностику и калибровку ,измерения диапазон другой на перенастройку быструю обеспечивать ,компенсацию температурную ,элемента
"интеллектуальный"датчикможетавтоматическипроизводитькоррекциюнелинейностичувствительного позволяетзначительнорасширитьфункциональныевозможностивичногопердатчика.Например, полевогооборудования.Этоозначаетналичиевнутриупервичныхустройствмикропроцессора,что Развитиесистемавтоматизациивпоследниегодытесносвязаноспонятием"интеллектуальности"
