

МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по выполнению контрольной работы по дисциплине
«Теория автоматического управления»
для студентов специальности «Промышленная электроника»
Тема контрольной работы: характеристики линейных корректирующих звеньев систем автоматического управления.
1. Введение
Система автоматического управления (САУ) содержит объект регулирования и регулятор, включающий элементы с трудно изменяемыми параметрами и характеристиками. Но в состав регулятора могут входить также элементы с легко изменяемыми параметрами и характеристиками, которые вводят в систему для придания ей требуемых динамических свойств. Такие элементы называют корректирующими устройствами, или звеньями. Существуют два способа включения корректирующих звеньев в САУ. По первому корректирующее звено включают последовательно с объектом регулирования. По второму корректирующее устройство охватывает часть звеньев САУ, то есть, включается параллельно, образуя обратные связи.
Р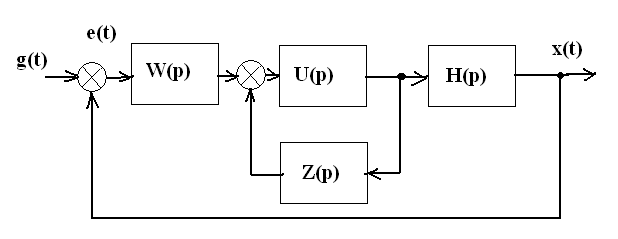 исунок
1. Схема САУ с корректирующими звеньями
исунок
1. Схема САУ с корректирующими звеньями
На рисунке 1 изображена схема САУ с корректирующими звеньями. Она содержит неизменяемую часть, в том числе объект регулирования, U(p) и H(p), последовательное корректирующее звено W(p) и параллельное корректирующее звено Z(p), шунтирующее часть объекта с передаточной функцией U(p). Передаточная функция всей системы, разомкнутой в месте измерения ошибки,
![]() =
=![]() .
.
Последовательные корректирующие звенья могут быть реализованы в электрической схеме в виде простых RC-цепей, однако следует избегать применения дифференцирующих цепей из-за их чувствительности к шумам и помехам. Параллельные корректирующие звенья в ряде случаев имеют преимущества: менее подвержены влиянию помех и шумов, уменьшают чувствительность системы к нестабильности параметров отдельных ее звеньев.
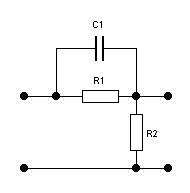
Поскольку обычно регулятор либо его часть выполнены в виде электронного устройства, корректирующие звенья также реализуют средствами электроники. В приведенной ниже таблице представлены электрические схемы 13 широко применяемых звеньев.
Таблица 1. Схемы корректирующих звеньев
№ |
Схема звена |
Передаточная функция |
Комментарий |
1 |
|
|
|
2 |
|
|
|
3 |
|
|
|
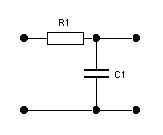
4 |
|
|
fp=1/2 |
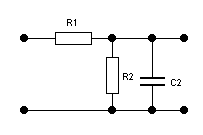
5 |
|
|
fp=1/2
(R1+R2)(C1 |
6 |
|
|
fp=1/2 C1(R1 R2) |

Продолжение табл. 1
7 |
|
|
|
8 |
|
|
|
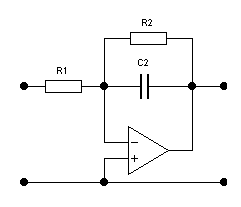
9 |
|
|
fp=1/2 C2R2 |
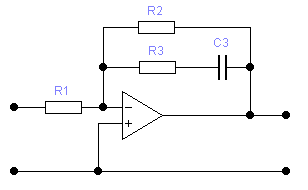
10 |
|
|
fp=1/2 C3(R2+R3)
|
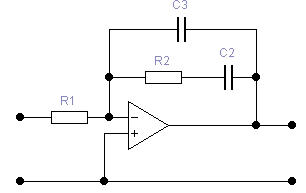
11 |
|
|
fp=1/2
R2C2C3/(C2+C3) |
12 |
|
|
fp=1/2 C1(R1 R11) |
13 |
|
|
fp=1/2 C1(R1 R11) |
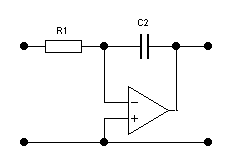
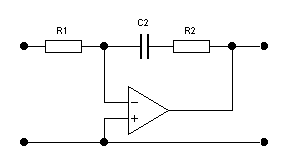
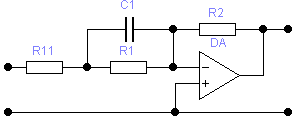
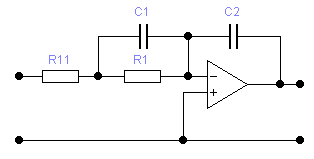
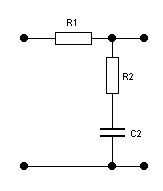
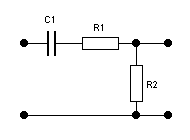
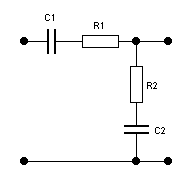
Звенья с первого по шестое – пассивные, они содержат исключительно резисторы и конденсаторы, поэтому во всем частотном диапазоне имеют коэффициент передачи не выше единицы (0 дБ). Остальные звенья содержат усилители и могут иметь коэффициент передачи более единицы.
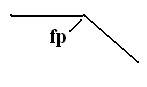
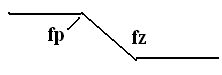
Для каждого звена в таблице приведено выражение для передаточной функции в операторной форме, а также схематично, асимптотами, показан ход амплитудно-частотной характеристики (АЧХ). Приведены выражения для частот нулей fz и полюсов fp передаточной функции. Знак в формулах означает параллельное соединение элементов, например, R1 R2=R1R2/(R1+R2), C1 C2=C1+C2.
Цель работы состоит в исследовании характеристик корректирующих звеньев в частотной и временной областях.