

методички / 4046 ЭИ
.pdf8.Проверить, уравновешена ли система сил, приложенная к подвижному диску. Если нет, то смещение пальца на подвижном диске совпадает с направлением равнодействующей данной системы сил.
9.Установить один из капроновых тросиков в направлении, полученном в соответствии с расчетами для уравновешивающей силы и нагрузить подвес гирями в соответствии с расчетами.
10.Убедиться, что после уравновешивания риски на подвижном диске и транспортире совпадают. В противном случае проверить графические построения и расчеты.
Контрольные вопросы
1. Какая система сил называется сходящейся?
2. Какая сила называется равнодействующей?
3. Какая сила называется уравновешивающей?
4. Назовите геометрическое условие равновесия плоской системы сходящихся сил. 5. Назовите аналитическое условие равновесия плоской системы сходящихся сил. 6. Как определить равнодействующую графическим способом?
7. Как определить модуль равнодействующей аналитическим способом?
8. Как определить направление равнодействующей аналитическим способом? 9. Какие аксиомы статики, использовались в данной лабораторной работе?
Лабораторная работа № 2
ИССЛЕДОВАНИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
Цель работы: ознакомиться на практике с методикой расчета и методами уравновешивания произвольной плоской системы сил.
Теоретические сведения
Сила, приложенная к свободному телу, вызывает поступательное движение. Если тело закреплено в некоторой точке и линия действия силы не проходит через эту точку, то она стремится повернуть тело вокруг этой точки (рис. 1). Количественно эффект вращательного действия силы выражается моментом силы относительно заданной точки, который равен произведению модуля силы F на ее плечо h, т.е. кратчайшее расстояние от выбранной точки до линии действия силы.
11

Рис. 1. Момент силы относительно точки
Момент силы относительно центра О будем обозначать символом MO(F). Следовательно,
M O F F h .
Вдальнейшем условимся считать, что момент имеет знак плюс, если сила стремится повернуть тело вокруг центра О против хода часовой стрелки, и знак минус, – если стремится вращать по ходу часовой стрелки. Так, для силы F1, изображенной на рис.1, момент относительно центра О имеет знак плюс, а для силы F2 – знак минус.
Отметим следующие свойства момента силы относительно точки:
1) момент силы не изменяется при переносе точки приложения силы вдоль ее линии действия;
2) момент силы относительно центра О равен нулю только тогда, когда сила равна нулю или когда линия действия силы проходит через центр О (плечо равно нулю).
Ввекторном виде момент силы относительно точки определяется векторным
произведением:
|
|
|
|
M O F |
r |
F , |
|
M O (F ) F r sin F h ,
где r – радиус-вектор, проведенный из точки O приведения силы (моментной точки) в точку приложения силы, α – угол между вектором силы и радиус-вектором, h – плечо силы.
Система сил Fi, равных по модулю, противоположных по направлению и лежащих на параллельных прямых, расположенных на расстоянии hi, называется парой сил (рис. 2).
В случае действия на тело пары сил, главный вектор этой системы сил равен нулю и остается лишь «чистый» момент пары, который определяется произведением любой из
12

сил, составляющей пару на ее плечо, т.е. расстояние между параллельными линиями действия сил.
Две пары, имеющие одинаковый момент эквивалентны. Это означает, что пару можно перемещать и поворачивать в плоскости, переносить из этой плоскости в другую, ей параллельную и трансформировать, т.е. менять соотношение силы и плеча пары, сохраняя модуль момента пары и направление вращательного действия. Примеры таких эквивалентных пар показаны на рис. 2.
Рис. 2. Моменты эквивалентных пар
Описание лабораторной установки
Впредлагаемой лабораторной работе изучается действие на твердое тело произвольной плоской системы сил и способы уравновешивания тела, находящегося под действием указанной системы сил. Лабораторная работа выполняется на установке ТМт- 2, состоящей из стержневой рамы, 1, закрепленной на двух основаниях. На раме закреплено десять подвижных блоков 2, фиксируемых в выбранном положении при помощи винтов. Через блоки перекинуты капроновые тросики 3 с подвесом для грузов 4. Второй конец тросиков 4 надевается при помощи металлической петли на штифты 5, вставляемые в отверстия подвижного диска 6. Усилия, приложенные к штифтам 5, вызывают поворот диска 6 относительно неподвижной линейки 7 с нанесенными на нее делениями. Поворот диска 6 контролируется по смещению вертикальной риски на диске по отношению к рискам линейки 7. В покое и в случае приложения уравновешенной системы сил риска на подвижном диске и центральная риска на линейке должны совпадать.
Вотношении к изучению действия различных систем сил на лабораторную установку следует заметить следующее. Любая внешняя сила, приложенная к диску, передается от диска на ось вращения. Согласно третьему закону Ньютона, со стороны оси на диск действует точно такая же по модулю, но противоположно направленная
13

сила, которая называется реакцией оси вращения. В случае, если линия действия внешней силы проходит через ось, то реакция оси ее полностью уравновешивает и диск остается в покое. В любом другом случае, т.е. когда линия действия внешней силы не проходит через ось, внешняя сила и сила реакции оси образуют пару сил, вызывающую вращение диска. С учетом того, что точка приложения реакции оси для диска не меняет своего положения, момент возникающей пары зависит от величины, направления и точки приложения внешней силы. Задача определения величины момента, возникающего при действии такой силы, состоит в определении расстояния от оси до линии действия внешней силы, т.е. плеча силы относительно оси. Учитывая, что момент – величина векторная, следует вывод, что в случае действия нескольких произвольно расположенных сил, можно определить момент от каждой из них отдельно, считая, что остальные силы отсутствуют. Результирующий момент от действия произвольной системы сил, определяемый относительно оси диска будет являться главным моментом произвольной системы сил, и вычисляться как сумма моментов каждой из действующих сил относительно оси. Главный вектор произвольной системы сил в случае приведения ее к оси диска определит величину реакции оси и может быть найден как векторная сумма пучка векторов сходящейся системы сил (см. л.р.№1).
Рис. 3. Схема лабораторной установки ТМт-02
Задача уравновешивания диска состоит в уравновешивании возникающего момента от действия произвольной системы сил. Как следует из вышесказанного, уравновесить диск, можно как с помощью одной силы, линия действия которой образует необходимое плечо относительно оси диска, и, следовательно, необходимый момент, так и при помощи пары сил. В последнем случае место приложения сил, составляющих уравновешивающую пару, роли не играет, важна лишь величина приложенных сил и плечо пары. В этом можно убедиться во время выполнения лабораторной работы на лабораторной установке ТМт-02.
14
Порядок выполнения работы
Расчетная часть
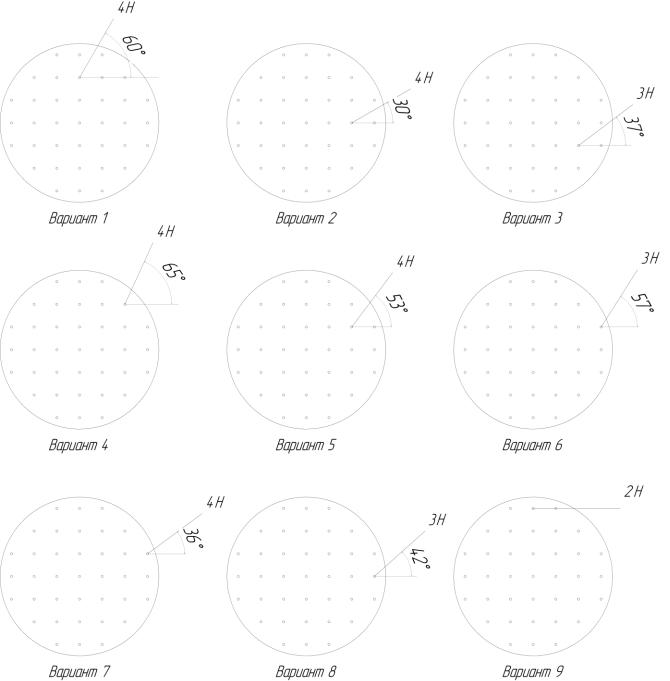
Вариант № 1 определения момента силы
1.Определить координаты точки приложения нагрузки к телу относительно оси вращения тела (согласно выданному варианту на рис. 4).
2.Определить расстояние от точки приложения силы до оси вращения (используя теорему Пифагора).
3.Используя угол приложения силы и остальные заданные размеры, определить плечо заданной силы относительно оси вращения.
4.Определить момент заданной силы относительно оси вращения тела.
Вариант № 2 определения момента силы
1.Определить составляющие силы по оси x и y системы координат.
2.Определить плечо каждой составляющей относительно оси вращения диска и найти моменты, создаваемые составляющими относительно оси вращения.
3.Определить суммарный момент и сравнить его с рассчитанным ранее через плечо силы.
4.Задавшись значениями плеча приложения уравновешивающей нагрузки, кратными расстоянию между отверстиями диска (25 мм), определить значения силы, способной уравновесить момент заданной силы относительно оси.
Экспериментальная часть
1.Разместить установку на ровной горизонтальной поверхности
2.Произвести нагружение установки в соответствии с исходными данными.
3.Уравновесить установку приложением рассчитанной нагрузки на выбранном расстоянии относительно оси вращения (произвести уравновешивание моментом силы относительно оси)
4.Убедиться, что равновесие не нарушится при перемещении точки приложения уравновешивающей силы вдоль линии ее действия.
5.Убедиться, что равновесие соблюдается при изменении направления действия силы с вертикального на горизонтальное (при сохранении плеча)
6.Уравновесить установку приложением двух сил, направленных противоположно на выбранном расстоянии друг от друга.
7.Убедиться, что перемещение момента в плоскости тела не влияет на состояние равновесия.
Исходные данные для выполнения лабораторной работы № 2
Приборы и материалы:
установка ТМт-02;
набор грузов и подвесов с нитями и штырьками;
15
линейка, транспортир и карандаш;
инженерный калькулятор.
Контрольные вопросы
1.Дать определение момента силы относительно точки.
2.Что называется плечом силы? Примеры нахождения плеча.
3.Какая система сил называется парой? Какими свойствами она обладает?
4.Каким способом можно уравновесить произвольную плоскую систему сил?
5.Каким способом можно найти момент силы относительно точки (разъяснить методику графического и координатного способа).
Рис. 4. Варианты исходных данных к лабораторной работе № 2
16

Лабораторная работа № 3
ОПРЕДЕЛЕНИЕ ЦЕНТРА ТЯЖЕСТИ ПЛОСКИХ ФИГУР
Цель работы: изучить методы расчета и экспериментального определения центра тяжести твердых тел на примере пластин произвольной формы.
Теоретические сведения
Центр системы параллельных сил
Рассмотрим систему n сил Pi, приложенных в точках Ai (xi, yi, zi) и параллельных оси Oξ c ортом τ (рис.1). (В тексте векторы будем обозначать символами с утолщенным начертанием вместо стрелки над символом, как показано на рис. 1).
Рис. 1. Система параллельных сил
Если заданная системы сил не может быть сведена к паре, то существует равнодействующая R данной системы сил. Основная задача при этом состоит в определении координат точки C(xc, yc, zc) – центра параллельных сил, то есть координат точки приложения равнодействующей этой системы. Для этого воспользуемся теоремой Вариньона, которая гласит о том, что сумма моментов каждой силы относительно произвольно выбранной точки равна моменту равнодействующей относительно той же точки:
MO (R) = ΣMO (Pi).
Вектор момента силы можно представить в виде векторного произведения радиусвектора точки приложения силы на вектор силы, поэтому:
17
МO(R) = rc×R = ΣМOi (Pi) = Σ(ri×Pi).
Учитывая, что R = Rξ∙τ, а Pi = Pξi∙τ и воспользовавшись свойствами векторного произведения, получим:
rc×Rξ∙τ = Σ(ri ×Pξi∙τ), rc∙Rξ×τ = Σ(ri∙Pξi×τ) = Σ(ri∙Pξi)×τ,
или окончательно
[rcRξ Σ(ri Pξi )]×τ = 0.
Поскольку орт τ не равен нулю, последнее выражение справедливо только в том случае, если выражение в квадратных скобках равно нулю. Опуская индекс ξ и учитывая, что равнодействующая R = ΣPi , получим:
rc = (ΣPi ri)/(ΣPi).
Проецируя последнее векторное равенство на оси координат Oxyz, получим искомое
выражение координат центра параллельных сил: xc = (ΣPi xi)/( ΣPi);
yc = (ΣPi yi)/( ΣPi); (1) zc = (ΣPi zi)/( ΣPi).
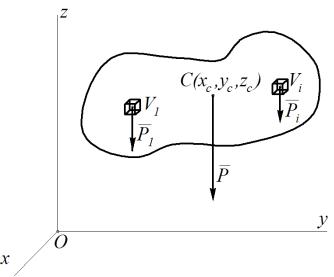
Рис. 2. Центр тяжести тела
Центром тяжести твердого тела называется центр параллельных сил тяжести элементарных частей этого тела.
Если тело однородное, то вес отдельной его части Pi = Vi·γ, где γ = P/V – удельный вес материала, из которого сделано тело, а Vi – объем этой части тела. Подставляя в (1)
18

γ∙Vi вместо Pi, и сокращая числитель и знаменатель на , получим выражения координат центра тяжести однородного тела:
xC (Pi xi ) / P (Vi xi ) /V (Vi xi ) /V ; |
|
yC (Pi yi ) / P (Vi xi ) /V ; |
(2) |
zC (Pi zi ) / P (Vi zi ) /V , |
|
где Р = ΣPi – вес всего тела, V = ΣVi – объем всего тела.
Если тело имеет вид тонкой пластины постоянной толщины t общей площадью S, лежащей в плоскости Oxy, то, подставляя в (2) Vi = t·Si, получим координаты центра тяжести однородной пластинки:
xс = Σ(Si∙xi) /S;
yc = Σ(Si∙yi) /S; (3) zc = Σ(Si∙zi) /S.
где xi, yi, zi – координаты центра тяжести отдельных пластин; S = ΣSi – общая площадь пластины.
Если тело можно разделить на части, у которых известны вес и положение центра тяжести, то в формулах (2) и (3) следует Pi – определять как вес соответствующей части и xi, yi, zi – как координаты ее центра тяжести.
Способы определения координат центра тяжести
1. Закон симметрии. Если однородное тело имеет плоскость, ось или центр симметрии (рис. 3), то его центр тяжести лежит соответственно в плоскости симметрии, оси симметрии или в центре симметрии. В треугольной пластине центр тяжести находится в точке пересечения медиан.
Рис. 3. Центр тяжести различных плоских фигур
2. Метод разбиения. Тело разбивается на конечное число частей (рис. 4), для каждой из которых положение центра тяжести и площадь известны.
19

Рис. 4. Метод разбиения
C1 (x1 , y1 ), S1 C2 (x2 , y2 ), S2
xC (x1 S1 x2 S2 ) /(S1 S2 ) yC ( y1 S1 y2 S2 ) /(S1 S2 ) .
3. Метод отрицательных площадей. Частный случай способа разбиения (рис. 5). Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. Тело в виде пластинки с вырезом представляют комбинацией сплошной пластинки (без выреза) с площадью S1 и площади вырезанной части S2.
Рис. 5. Метод отрицательных площадей
C1 (x1, y1 ), S1 C2 (x2 , y2 ), S2
xC (x1 S1 x2 S2 ) /(S1 S2 ) yC ( y1 S1 y2 S2 ) /(S1 S2 ) .
Определение координат центра тяжести различных инженерных конструкций является важной задачей. Особенно важно знать положение центра тяжести у транспортных объектов, например самолетов, железнодорожных экипажей, автомобилей. Координаты центра тяжести используются при решении задач на устойчивость и граничные условия опрокидывания конструкций. На практике, для определения центра
20