

5.Анализ характеристик скорректированной системы
ЛАЧХ и ЛФЧХ скорректированной системы изображены на рисунке 10. По рисунку легко получить запасы устойчивости по фазе и амплитуде. Таким образом, запас устойчивости по фазе составляет Δα(w)=30а по амплитудеΔφс(w)=35дБ. Так как ЛАЧХ в области низких частот не имеет наклона, то степень астатизма=0 (система статическая).
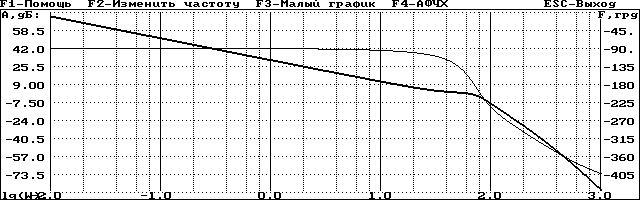
Рисунок 10 - ЛАЧХ и ЛФЧХ разомкнутой скорректированной системы:
1 - ЛФЧХ;
2 - ЛАЧХ;
3 - линия фазового сдвига - ;
4 - ось частот ЛАЧХ;
5 - точка пересечения ЛФЧХ и линии фазового сдвига;
Δα(w)– запас устойчивости по фазе;
Δφс(w)– запас устойчивости по амплитуде.
Передаточная функция разомкнутой системы с корректирующим устройством
![]()
По переходной характеристике изображенной на рисунке 11 определим основные показатели качества данной САУ: tР=0,1си=[(hmax-h)/h]100%=
[(1,08-1)/1]1*100%=8%
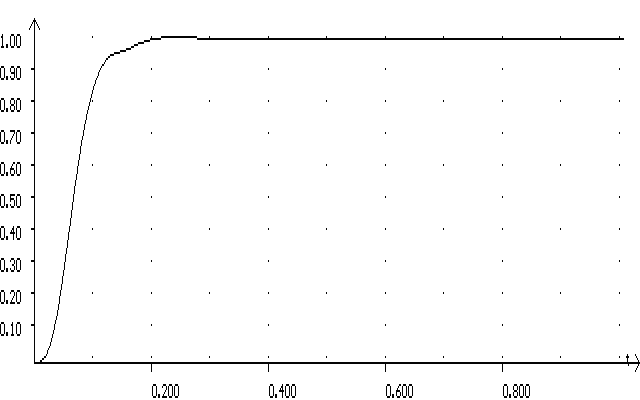
Рисунок 11 - Переходная характеристика замкнутой скорректированной системы
Заключение
В результате проделанной работы над приведенной САУ мы сохранили её устойчивой с достаточными запасами устойчивости. Как видно из графика переходной характеристики замкнутой скорректированной системы (см. рисунок 11), получившееся время переходного процесса составило 0.1 с, как и заданное 0,1с. Такой же вывод можно сделать и относительно перерегулирования, которое составило 8% вместо требуемых 10%. Система осталась устойчивой с достаточными запасами по фазе и амплитуде соответственно и дБ.
Для стабилизации и демпфирования данной системы использовался метод построения “желаемой” ЛАЧХ. По её виду определялась передаточная функция дополнительного к системе корректирующего звена. “Желаемая” ЛАЧХ системы в области низких и высоких частотах совпадает по наклону с ЛАЧХ начальной системы. Следовательно для корректировки системы достаточно подсоединить последовательно одно корректирующее звено, являющееся результатом последовательного соединения двух интегро–дифференцирующих звеньев. Это сравнительно удобно, т.к. любое интегро–дифференцирующее звено можно реализовать с помощью обычного четырехполюсника, что и было сделано в данной работе.
Литература
Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975. – 767 с.
Иващенко Н.Н. Автоматическое регулирование.– М.: Машиностроение, 1973.– 608 с.
Макаров И.М., Менский Б.М. Линейные автоматические системы. 2-е изд. перераб. и доп.– М.: Машиностроение, 1982. –504 с.
Основы автоматического регулирования и управления / Под ред. В.М. Пономарева и А.П. Литвинова. Учеб. пособие для вузов. – М.: Высшая школа, 1974. –439 с.
Попов Е.П. Теория линейных систем автоматического регулирования и управления. – М.: Наука, 1978. –256 с.
Сборник задач по теории автоматического регулирования и управления / Под ред. В.А. Бесекерского. –изд. 5-е. – М.: Наука, 1978. –512 с.
Солодовников В.В., Плотников В.М., Яковлев А.В. Основы теории и элементы систем автоматического регулирования: Учеб. пособие для вузов. – М.: Машиностроение, 1985. –536 с.