

9_физ_2(кинематика)
.pdf2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
скорости v к малому промежутку времени t , за которое произошло это изменение, при условии t 0
a = lim |
v . |
(18) |
t 0 |
t |
|
Этот предел называется производной скорости по времени. Проекция ускорения на координатную ось является первой производной проекции скорости на эту ось или второй производной координаты по времени. Например:
ax |
= lim |
vx |
= |
d vx |
|
|
(1) |
|
|
|
|||||
t |
dt |
= vx = x . |
|||||
|
t 0 |
|
|
|
|
||
Направление вектора а |
ускорения |
совпадает |
с |
направлением |
|||
вектора v изменения скорости при очень малых значениях изменения времени t 0 .
7.3.Ускорение при криволинейном движении
Вслучае криволинейного движения вектор ускорения à тела может
быть направлен по отношению к |
вектору v |
|
|
|
|
|
||
скорости |
под любым углом |
в пределах |
|
|
|
|
|
|
an |
||||||||
0 < < . |
В этом случае его можно пред- |
|||||||
|
|
|
|
|
||||
ставить в |
виде суммы двух составляющих: |
|
|
|
|
|
||
|
|
a |
||||||
тангенциальной и нормальной. Тангенциаль- |
|
|
||||||
|
|
|
|
|
||||
ное ускорение a направлено по касательной к |
|
|
|
|||||
a |
|
|
||||||
траектории, нормальное ускорение |
an по нор- |
|
|
Рис. 8 |
||||
мали к касательной (см. рис. 8). |
|
|
|
|
|
|
Комментарий к рис. 8. Направления |
векторов |
нормального |
||||
|
|
|
|
|
|
|
тангенциального a |
ускорений (на |
рисунке |
изображён |
|||
тормозящего тела, т. к. a v ). |
|
|
|
|
|
|
Из рисунка следует, что модуль а |
полного ускорения равен: |
|||||
|
|
|
|
|
|
|
|
|
a2 |
a2 |
|
||
|
| a |= |
|
|
|||
|
|
|
n |
|
|
|
v
an и
случай
(20)
Стоит отметить, что тангенциальное ускорение отвечает за быстроту изменения модуля вектора скорости, а нормальное характеризует именно быстроту изменения направления вектора скорости подробно этот случай можно посмотреть в задаче № 4 .
8. Равноускоренное движение тела по прямой
Как и в случае равномерного движения отдельно выделяют случай равноускоренного движения. Согласно определению равноускоренным называется движение с постоянным по модулю и направлению уско-
рением a = const.
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
11

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
При равноускоренном прямолинейном движении ускорение движущегося тела равно отношению изменения вектора скорости v к интервалу времени t, причем интервал времени может быть любым, а
не только очень малым: |
|
|
a = |
v . |
(21) |
|
t |
|
Если в начальный момент времени t = 0 скорость тела равна v0 , а в
момент времени t равна v, то |
|
|
|
|
v = v v0 , t = t, |
v = v0 at. |
(22) |
||
Можно показать, что перемещение: |
|
|
|
|
L = v t |
at2 |
. |
(23) |
|
|
||||
0 |
|
2 |
|
|
|
|
|
|
|
Направим ось Ох вдоль направления движения. |
Обозначим через, |
|||
vx , v0 x , ax , Lx проекции на ось Ох соответствующих векторов. Причем Lx = x x0 , где x и x0 конечная и начальная координаты тела. Запишем два последних векторных равенства в проекциях на ось Ох :
v |
|
= v |
a |
t, |
L |
= x x |
= v |
t |
axt2 |
. |
(24) |
|
x |
|
|||||||||||
|
0 x |
x |
|
|
x |
0 |
x |
2 |
|
|
||
Исключив время t , получим: |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
v2 |
v2 |
= 2a L . |
|
|
|
(25) |
|||
|
|
|
x |
|
|
0 x |
x x |
|
|
|
|
|
Последние три равенства есть кинематические уравнения движения при равноускоренном прямолинейном движении тела. При равноускоренном прямолинейном движении векторы v и à могут быть сонаправлены или направлены противоположно. При сонаправленных векторах кинематические уравнения движения принимают вид:
v = v at, |
L = x x |
= v t |
at2 |
, |
v2 v2 |
= 2aL. |
(26) |
|
|
||||||||
0 |
0 |
|
0 |
2 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
Здесь v, v0 , a, L модули скорости, |
начальной скорости, ускорения |
|||||||
и перемещения. При этом модуль перемещения совпадает с путем. Поэтому эти четыре величины часто называют как скорость, начальная скорость, ускорение и путь. При прямолинейном движении и
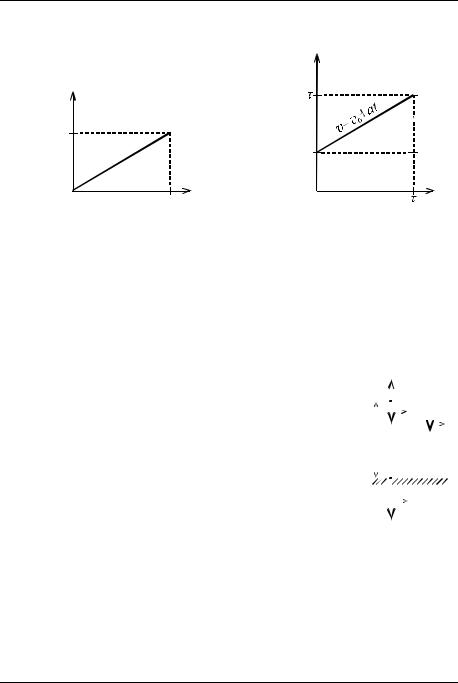
сонаправленных векторах v0 и a движение называют часто прямолинейным равноускоренным, а при противоположно направленных векторах v0 и a прямолинейным равнозамедленным. График зависимости модуля скорости от времени t при равноускоренном прямолинейном движении тела с нулевой начальной скоростью v0 = 0
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
12
2015-2016 уч. год, №2, 9 кл. Физика. Кинематика |
|
||
представлен на рис.9а, а с ненулевой v0 0 на рис. 9б. |
|
||
|
|
v |
|
v |
|
v0+a |
|
|
|
v0 |
|
O |
t |
O |
t |
|
Рис. 9а |
Рис. 9б |
|
Комментарий к рис. 9. а) График зависимости модуля скорости от времени |
|||
tпри равноускоренном прямолинейном движении v0 = 0; б) при v0 0.
Вкачестве примера рассмотрим движение тела в поле тяжести Земли. Известно, что такое движение можно считать примерно равноускоренным, если тело падает на Землю с небольшой высоты, а сопротивление воздуха пренебрежимо мало. В таком приближении можно говорить, что тело падает в пустоте, а соответствующее движение отнести к случаю свободного падения (на
тело не действуют силы). Все тела при свободном |
|
|
y |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||
падении движутся |
с одинаковым |
ускорением g, |
|
|
|
|
|
A |
|
|
|
|
|
||||
называемым ускорением свободного падения. В |
|
|
|
|
|
v0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||||||
различных местах |
около поверхности земного шара |
H |
|
|
|
|
|
|
g |
|
|
||||||
ускорение свободного падения примерно одинаково и |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
равно g 9,8 м/с 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
Земля |
||||
Пример №5. Итак, пусть тело в начальный момент |
|
|
|
|
|
|
|||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|||||||
времени находится на высоте H в точке A и имеет |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
v |
|
|
|
|
|
|||||||
скорость v0 , направленную к поверхности Земли. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
Найти время, за которое тело достигнет поверхности |
|
|
Рис. 10 |
||||||||||||||
(рис. 10). |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Решение. Из выражения (26) следует, что путь, |
|
|
|
|
|
|
|
|
|
|
|
||||||
пройденный телом при свободном падении равен: |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
L = v t |
1 |
at t = v t |
gt2 |
. |
|
|
|
|
|
|
(27) |
|||||
|
|
|
|
|
|
|
|
|
|||||||||
|
0 |
2 |
|
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Данное уравнение представляет собой квадратный трёхчлен с дискриминантом D = v02 2Lg. Соответствующие корни данного урав-
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
13

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика |
|
|
|
|
|
||||||||
нения имеют вид: |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
v |
|
v2 |
2Lg |
|
|
|
|
|
|
|
|
t1,2 = |
0 |
|
0 |
|
|
. |
|
|
(28) |
|
|
|
|
|
|
g |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ясно, что t > 0 , поэтому один корень лишний. Таким образом, тело |
|||||||||||||
достигнет поверхности Земли через время: |
|
|
|
|
|
||||||||
|
|
|
|
= |
v2 |
2Lg v |
|
|
|
|
(29) |
||
|
|
|
0 |
|
g |
0 . |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: |
= |
v2 2Lg v |
0 . |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
g |
|
|
|
|
|
|
|
|
|
|
|
8.1. Движение тела, брошенного под углом к горизонту |
|||||||||||||
Рассмотрим этот частный случай движения на следующем примере. |
|||||||||||||
Пример №6. Камень брошен с высоты |
h |
|
y v0 |
|
|
||||||||
над поверхностью Земли с начальной скорос- |
|
|
|||||||||||
тью v0 под углом к горизонту (см. рис. 11). |
|
|
|
||||||||||
Определите зависимость координат тела от |
|
|
g |
||||||||||
времени, время движения и дальность полета |
|
|
|
||||||||||
камня, максимальную высоту его подъема над |
h |
|
|
||||||||||
поверхностью Земли. Напишите уравнение |
|
|
x |
||||||||||
траектории. Сопротивлением воздуха прене- |
|
l |
|||||||||||
бречь. |
|
|
|
|
|
|
|
|
|
|
Рис. 11 |
||
Решение: В качестве тела отсчёта выберем |
|||||||||||||
Землю. Начало системы координат поместим в |
|
|
|
||||||||||
точку О , находящуюся на Земле. Ось OY |
|
направим |
вертикально |
||||||||||
вверх, а ось ОХ расположим так, чтобы вектор скорости v0 , |
лежал в |
||||||||||||
плоскости XOY (см. рис. |
11). В этом случае движение будет проис- |
||||||||||||
ходить в указанной плоскости и для определения положения тела |
|||||||||||||
достаточно знать только две координаты х и у. |
Как мы уже гово-рили |
||||||||||||
ранее, у поверхности Земли все тела движутся с постоянным |
|||||||||||||
ускорением |
g, |
направленным вертикально вниз. Поэтому проекции |
|||||||||||
ускорения камня во время всего его движения равны: ах |
= 0 ; |
ay = g. |
|||||||||||
За начало отсчёта времени выберем момент бросания камня. Запишем |
|||||||||||||
начальные |
условия: |
х0 = 0, |
y0 = h, |
v0 x |
= v0 cos , |
v0 y = v0 sin . |
|||||||
Проекции скорости на оси координат и координаты камня в любой |
|||||||||||||
момент времени определяются из уравнений равноускоренного |
|||||||||||||
движения: |
|
|
|
|
|
|
|
|
|
|
|
|
|
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович |
|
|
|
|
|||||||||
|
|
|
Паркевич Егор Вадимович |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
14 |

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
vx = v0 cos |
|
(30) |
|||||
vy = v0 sin gt |
|
(31) |
|||||
x = v0t cos |
|
(32) |
|||||
y = h v t sin |
gt2 |
. |
|
(33) |
|||
|
|
|
|||||
0 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||
Найдём связь времени t с координатой x из (32) |
|
x |
|||||
(t = |
|
) и, |
|||||
v cos |
|||||||
|
|
|
|
|
|
0 |
|
подставив полученное выражение в уравнение (33), получим: |
|||||||
y = h xtg |
gx2 |
|
|
|
|||
|
. |
|
(34) |
||||
2v02 cos2 |
|
||||||
Это выражение является уравнением параболы. При заданном значении
угла это парабола типа |
y = ax2 bx c. |
Время |
подъёма |
камня |
|||
определим, приравняв нулю проекцию скорости vy |
в уравнении (31): |
||||||
0 = v0 sin gtпод , |
откуда получим |
tпод |
= |
v0 sin |
. |
(35) |
|
|
g |
||||||
|
|
|
|
|
|
|
|
Подставляя полученное значение времени подъёма камня в уравнение (33), найдём максимальную высоту подъёма камня:
H = y |
|
= h v |
|
|
sin |
v0 sin |
|
g |
( |
v0 sin |
)2 = |
|||||
max |
0 |
|
|
|
||||||||||||
|
|
|
|
|
|
g |
2 |
|
|
g |
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
v02 sin2 |
|
|
v02 sin2 |
|
v02 sin2 |
(36) |
|||||||||
h |
|
|
= h |
. |
|
|||||||||||
|
|
g |
|
|
2g |
|
2g |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Время движения tдв определим, приравняв нулю координату y |
в урав- |
||||||||
нении (33): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
gt2 |
|
|
|
0 = h v t |
|
sin |
|
дв |
. |
|
(37) |
||
дв |
|
|
|
||||||
|
0 |
|
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
||
Решив полученное уравнение относительно tдв , получим: |
|
||||||||
|
|
|
|
|
|
|
|||
tдв = |
v0 sin |
|
v02 sin |
2 2gh |
. |
(38) |
|||
|
|
|
g |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Второй корень уравнения не имеет смысла. Дальность полёта камня l определим из уравнения (32) при подстановке t = tдв :
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
15

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
l = xmax |
= v0tдв cos = |
v02 sin cos v0 cos |
v02 sin2 2gh |
. |
(39) |
g |
|
||||
|
|
|
|
|
Из полученного выражения также следует, что дальность полёта будет максимальна, если тело было брошено под углом в 45 .
Ответ: смотри решение.
9. Равномерное движение тела по окружности 9.1. Период и частота обращения
Соответствующий интервал времени, за который тело совершает один оборот по окружности, называется периодом обращения и
обозначается буквой Т . При равномерном движении по окружности |
|||
радиусом R со скоростью v период обращения Т |
можно определить, |
||
разделив длину окружности на скорость v, т. е. |
|
||
T = |
2 R |
. |
(40) |
v
Число оборотов в единицу времени n называется частотой обращения. Ясно, что
n = T1 .
Угловая скорость вращения
Движение материальной точки по окружности можно характеризовать угловой скоростью вращения. Согласно определению
угловой скоростью движения точки по окружности радиусом R
называется отношение угла поворота радиуса-вектора, соединяющего материальную точку с центром окружности, к малому интервалу времени t , за который произошел этот поворот
|
= |
|
. |
(41) |
|
|
|||
|
|
t |
|
|
Это определение для мгновенной угловой скорости. Угол поворота |
||||
|
измеряется в радианах, поэтому единица угловой скорости в СИ – |
|||
радиан в секунду; 1 рад 57.29 . |
vA |
|
A |
vA |
|
A |
B |
B |
R |
a |
v |
R |
|
vB |
|
|
O |
|
|
|
|
|
|
O |
|
|
|
Рис. 12а |
Рис. 12б |
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
16

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
Комментарий к рис. 12а и 12б: а) угловая скорость вращения;
б) изменения вектора скорости v в течение малого интервала времени t .
9.3. Связь линейной и угловой скоростей. Связь угловой скрости и частоты обращения
Найдём связь между линейной v и угловой скоростями вращения. Вернёмся к рис. 12а. Из планиметрии известно, что длину
дуги AB окружности можно выразить через радиус |
R окружности и |
||
центральный угол . Как известно, эта связь имеет вид: |
|||
AB = R . |
(42) |
||
С другой стороны этот угол равен отношению длины дуги AB к |
|||
радиусу окружности, а соответствующая длина дуги |
AB равна v t. |
||
Выражая отсюда скорость v, получим: |
|
||
v = R |
|
= R . |
(43) |
|
|||
|
t |
|
|
Итак, |
|
||
v = R |
(44) |
||
Можно показать, что
= 2 n
9.4.Угловое ускорение*
Вслучае неравномерного движения вводят ещё одну величину, характеризующую быстроту изменения угловой скорости движения материальной точки по окружности – угловое ускорение, равное:
|
|
|
|
|
|
|
|
= t |
= |
= |
(45) |
||||
|
|
||||||
Угловое ускорение измеряется в рад/с 2 . |
|
Из (45) следует ещё одно |
|||||
полезное соотношение в случае постоянного углового ускорения: |
|
||||||
(t) = |
t2 |
|
t |
. |
|
(46) |
|
= |
|
|
|||||
|
2 |
|
2 |
|
|
|
|
Рассмотрим следующий пример.
Пример №7. Диск, вращаясь равноускоренно, через 20 оборотов достигает угловой скорости 40 рад/с после начала вращения. Найти угловое ускорение колеса.
Решение: Выразим угол поворота колеса:
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
17

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
С другой стороны:
Из последнего уравнения уравнение:
Ответ: = |
2 |
|
|
= 6,3 м |
|
|
||
|
4 N |
|
(t) = 2 N = |
t2 |
= |
t |
. |
(47) |
||
2 |
2 |
||||||
|
|
|
|
|
|||
= |
|
|
|
|
(48) |
||
|
|
t |
|
|
|
|
|
выражаем время и подставляем в первое
= |
2 |
(49) |
|
|
= 6,3 м / с. |
||
|
|||
|
4 N |
|
|
/ с.
9.5.Центростремительное ускорение
Вприроде и технике часто наблюдается движение тел по окружности с постоянной по модулю скоростью. Примерно так движутся Луна вокруг Земли и Земля вокруг Солнца. При равномерном
движении материальной точки по окружности вектор скорости v изменяется по направлению, но остается постоянным по модулю. Поскольку направление вектора скорости изменяется со временем, равномерное движение по окружности является ускоренным движением.
Если модуль вектора скорости v при движении по окружности не изменяется со временем, то тангенциальное ускорение равно нулю, в любой момент времени вектор ускорения перпендикулярен вектору
скорости и является нормальным ускорением à = àí . Так как вектор
ускорения при равномерном движении по окружности в любой момент времени t направлен к центру окружности, его называют центростремительным ускорением (см. рис. 12б).
Далее, пусть тело движется равномерно со скоростью v по окружности радиусом R (рис. 12б), найдём выражение для модуля центростремительного ускорения aн , а также период обращения тела
T , т. е время, за которое тело совершит один оборот по окружности. Для этого сначала найдем отношение модуля изменения вектора
скорости к малому интервалу времени t , за который произошло это
изменение. Так как интервал времени t |
очень мал, то угол |
между |
|
|
|
векторами скорости v и a в точках А и В окружности тоже очень мал. |
||
Поэтому можем записать: |
|
|
| v |= v . |
|
(50) |
Далее, заметим, что угол между векторами скорости в точках А
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
18

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
и В равен углу между радиусами, соединяющими данные точки с центром окружности. С другой стороны этот угол равен отношению
длины дуги |
АВ к радиусу окружности, а соответствующая длина дуги |
|||||||||||||
АВ равна v t. |
Следовательно, |
|
|
|
|
|
|
|
|
|
||||
|
|
|
= |
v t |
. |
|
|
|
(51) |
|||||
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
R |
|
|
|||||
Согласно определению модуль ускорения равен: |
||||||||||||||
|
|
|
| v | |
|
|
|
v |
v t |
|
|
||||
|
|
a =| a |= |
|
= |
R |
|
= |
v2 |
. |
|||||
|
|
t |
|
|
|
|
||||||||
Итак, |
|
|
|
|
|
t |
R |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
v2 |
2 R. |
(52) |
|||||||||
|
|
|
||||||||||||
|
|
|
|
R |
|
|
||||||||
Стоит однако отметить, что модуль вектора центростремительного |
||||||||||||||
ускорения |
à |
при равномерном |
движении |
тела по окружности не |
||||||||||
изменяется, но его направление непрерывно изменяется. Поэтому равномерное движение по окружности не является движением с постоянным ускорением, т. е. не является равноускоренным движением!
10. Преобразования Галилея |
|
|
|
|
|
|
|
||||
Найдём связь между координатами, |
Y |
Y1 |
|
|
|
|
|
|
|||
проекциями скоростей и ускорений в двух |
u |
||||||||||
|
|
||||||||||
системах отсчёта K |
|
движущихся |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
и K , |
|
|
|
|
|
|
|
|
|||
поступательно относительно друг друга с |
|
|
|
|
|
|
|
|
|||
|
|
|
r |
||||||||
постоянной скоростью u. Для простоты |
|
|
|
|
|
|
|
|
|||
будем считать, что координатные оси X и |
|
|
|
|
|
r1 |
y=y1 |
||||
X1 обеих систем совпадают, а оси Y ,Y1, и |
O |
|
O1 |
X1 |
X |
|||||
Z, Z1 параллельны друг другу. |
Пусть |
в |
ut |
x1 |
z=z1 |
|
||||
начальный |
момент |
времени |
начала |
|
x |
|
|
|
||
координат обеих систем совпадают. Если в |
Z |
|
Z1 |
|
|
|||||
момент времени t движущаяся точка |
|
|
|
|||||||
|
|
|
|
|
||||||
находилась в положении A (см. рис. 13), то |
|
|
Рис. 13 |
|
|
|||||
её положения в системах отсчёта |
K и |
K |
|
|
|
|
||||
|
|
|
|
|
||||||
|
|
|
|
|
1 |
|
|
|
||
можно задать радиусами-векторами r = OA |
и r1 |
= O1 A . |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
Тогда r = OO1 |
r1 |
. За время t |
начало координат системы отсчёта |
|||||||
K1 переместилось на OO1 = ut. Поэтому предыдущее равенство примет |
||||
вид: |
|
|
|
|
|
r = r1 |
ut |
(53) |
|
Запишем это соотношение в проекциях на координатные оси. Для |
||||
проекций на ось X , получим: |
x = x1 uxt |
|
||
|
(54) |
|||
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
19

2015-2016 уч. год, №2, 9 кл. Физика. Кинематика
Коментарий к рис. 13. системы отсчёта K и K , движущиеся поступательно относительно друг друга с постоянной скоростью u.
Координаты y, z и y1, z1 одинаковы в обеих системах отсчёта K1 . Поэтому преобразования координат при переходе от системы отсчёта
K1 |
к системе отсчёта K будут иметь вид: |
|
|
|
|
x = x1 uxt, |
y = y1, |
z = z1 |
(55) |
Считается, что время течёт одинаково в системах отсчёта |
K и K1 , |
|||
так |
что t = t1 . Преобразования (55) |
носят |
название преобразований |
|
Галилея. |
|
|
|
|
11. Закон сложения скоростей
Найдём теперь преобразования скоростей при переходе от одной
системы отсчёта к другой (см. рис. 13). При движении точки |
A |
её |
||||||
радиус-вектор r |
в системе отсчёта |
K |
за малый интервал времени |
t |
||||
|
|
|
и станет равным |
|
|
|
|
|
изменится на r |
r |
r . За то же время в системе |
||||||
отсчёта K |
1 |
вектор r изменится |
на |
r и станет равным |
r |
r . |
||
|
|
1 |
|
1 |
1 |
|
1 |
|
Согласно (57) эти новые векторы должны быть связаны соотношением: |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
r |
r = r1 |
r1 |
u(t |
t) |
|
(56) |
|||
|
|
|
|
|
|
|
|
|
|
|
Учитывая, что r = r |
ut , получим: |
|
|
|
|
|
|
|||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
r = r1 u t |
|
|
|
(57) |
||||
|
|
|
|
|
|
|
t. |
|||
Эта формула связывает перемещения r |
и |
|
r1 за время |
|||||||
Разделим правую и левую часть части этого равенства на t и будем |
||||||||||
считать, что интервал |
t сколь угодно мал ( t |
0 ). Тогда вместо |
||||||||
(57) получим уравнение:
|
|
|
= lim |
|
|
|
lim |
u |
|
|
|
t 0 |
t 0 |
|
|
r |
|
|
|
Поскольку |
lim t 0 t = v есть |
мгновенная |
||
системе |
отсчёта |
K , |
а |
|
lim t 0 r1 = v1 |
мгновенная |
скорость |
|
|
t |
|
|
|
v2 |
этой же точки относительно системы |
|
|||
отсчёта K1 , то, таким образом, мы при- |
|
|||
ходим к следующему закону сложения |
|
|||
скоростей: |
|
|
|
|
v = v1 u. |
|
(59) |
а) |
|
Рассмотрим следующий пример. |
|
|||
|
|
|||
Пример №7. Два корабля, движутся
(58)
скорость точки в
|
|
|
v2 |
|
v1 |
|
|
|
|
|
|
||
v1 |
|
|
B |
|
|
|
|
|
v’ |
||||
|
|
|
||||
|
|
|
|
|||
|
|
|
|
|
|
D |
|
- |
v2 |
|
|
||
|
E |
|
|
|
||
Рис. 14 |
б) |
|||||
2015, ЗФТШ МФТИ, Чивилёв Виктор Иванович Паркевич Егор Вадимович
20