

шпоры_ПРИВОД
.pdfРис. 2.8
Как следует из рис. 2.8, магнитная индукция B результирующего магнитного поля машины вращается, оставаясь неизменной по величине. Таким образом, трёхфазная обмотка статора создаёт в машине круговое вращающееся магнитное поле. Направление вращения магнитного поля зависит от порядка чередования фаз. Величина результирующей магнитной индукции
B = 3/ 2× B m .
Частота вращения магнитного поля n 0 зависит от частоты сети f и числа пар полюсов магнитного поля p .
n 0= ( 60f ) / p , [об/мин].
Обратите внимание, что частота вращения магнитного поля не зависит от режима работы асинхронной машины и её нагрузки.
При анализе работы асинхронной машины часто используют понятие о скорости вращения магнитного поля ω 0, которая определяется соотношением:
ω 0= ( 2π f ) / p = π n 0/ 30, [рад/сек].
31

27. Механические характеристики АД в 1 фазном режиме.
32

28. Схемы пуска трёхфазных АД в 1 фазном режиме и их особенности.
33
29. Механическая и угловая характеристика синхронного двигателя.
Механическая – момент от угловой скорости Угловая – зависимость момента М от угла между напряжением и ЭДС
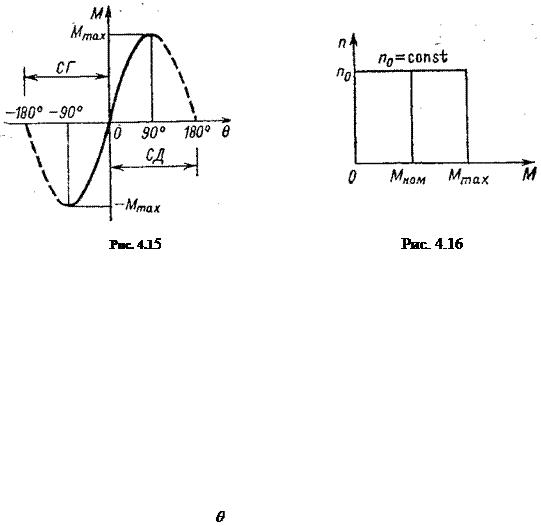
Угловая и механическая характеристики. Зависимость момента синхронной машины от угла нагрузки  при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол
при Uc = const называется угловой характеристикой машины. Угловая характеристика (рис. 4.15) в соответствии с (4.5) имеет вид синусоиды. В двигательном режиме угол  положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол
положительный, поэтому на графике двигательному режиму соответствует положительная полуволна синусоиды. В генераторном режиме угол  отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°<
отрицательный, ему соответствует отрицательная полуволна синусоиды. В диапазоне угла нагрузки -90°< <+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
<+90° (ветвь синусоиды показана сплошной линией) работа машины, как в двигательном, так и в генераторном режиме устойчива, а на участках кривой, изображённых штриховой линией, – неустойчива.
На устойчивом участке характеристики машина обладает свойством саморегулирования, т.е. при изменении момента нагрузки автоматически изменяется в том же направлении момент машины, причём так, что в новом установившемся режиме между ними достигается равновесное устойчивое состояние. Так, в двигательном режиме при увеличении механической нагрузки Мс ротор притормаживается, угол нагрузки  увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
увеличивается и в соответствии с угловой характеристикой увеличивается вращающий момент двигателя М. При равенстве М= Мс наступит новый установившийся режим, причём частота вращения ротора останется неизменной и равной частоте вращения магнитного поля статора; только при этом равенстве существует электромагнитное взаимодействие полюсов ротора и статора, обусловливающее момент М машины.
Максимальный момент Мmax машины является и |
критическим. Если нагрузить двигатель так, |
что Мс>Мmax , то угол нагрузки станет больше 90°, |
рабочая точка перейдёт на неустойчивый уча- |
сток угловой характеристики. Вращающий момент двигателя М начнёт уменьшаться, ротор тормозиться, двигатель выйдет из синхронизма и может остановиться. Аналогичные явления происходят и в генераторном режиме. Выход («выпадение») машины из синхронизма – явление недопустимое, оно может привести к тяжёлой тобы в номинальном режиме угол нагрузки и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не ме-
и запас по моменту и активной маварии в электрической сети. Поэтому синхронные машины проектируются так, чощности составлял не ме-
нее 1,65.
Механической характеристикой синхронного двигателя называется зависимость частоты вращения от момента двигателя. В синхронном двигателе частота вращения ротора постоянна и от нагрузки не зависит. Поэтому механическая характеристика n(M) (рис. 4.18) – прямая, параллельная оси абсцисс.
34
30. Способы пуска и реверса АД и синхронных двигателей.
Используются следующие способы пуска:
Прямой пуск;
Пуск с переключением обмоток со схемы «треугольник» на сети 380 В, напряжение двигателя должно быть 380 В – 600 В.
Пуск с ограничением тока через пусковые резисторы, включённые в цепь статора.
Пуск с понижением напряжения тиристорными регуляторами, автотрансформаторами
Пуск с изменением частоты тока при использовании преобразователей частоты (идеальный пуск).
Двигатель с фазным ротором запускается путём включения дополнительных резисторов в ротор, при этом пусковой ток уменьшается, а пусковой момент увеличивается.
Ступенчатый пуск многоскоростных двигателей
Реверс двигателя осуществляется изменением порядка чередования фаз.
35

31. Тормозные режимы ДПТ.
Различают следующие основные способы торможения:
Торможение с отдачей энергии в сеть (генераторный режим работы);
Динамическое торможение
Торможение противовключением.
1) осуществляется в том случае, когда скорость двигателя оказывается выше скорости идеального холостого хода и его ЭДС больше приложенного напряжения.
I = ( U – E ) / R = - ( E – U ) / R
Изменяет знак и момент двигателя, он становиться тормозным M = − kФI.
При ω > ω0: ω = U / kФ + МтR / k2Ф2.
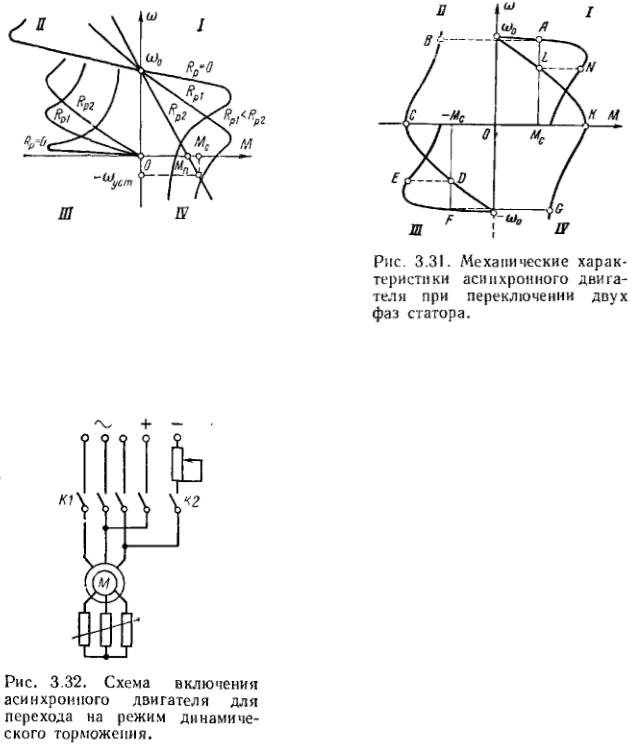
2) происходит при отключении якоря двигателя от сети и замыканием его на резистор, поэтому иногда его называют реостатным торможением. Режим динамического торможения также соответствует работе машины в качестве генератора.
Ток якоря определяется по формуле:
I = - E / R , где R – сопротивление цепи
Mт = kФI = − k2Ф2ω / R.
При Ф = const получим: ω = МтR / с2 (с = k2A2).
3) осуществляется в том случае, когда обмотки двигателя включены для одного направления вращения, а якорь двигателя под воздействием внешнего момента или сил инерции вращается в противоположную сторону. Пример с приводом подъёмника.
Рис. Торможение противовключением в случае тормозного пуска.
При этом ток в якоре: I = (U - E) / R
36
С увеличением момента груза угловая скорость двигателя уменьшается соответственно характеристике АВ и если момент груза будет Мк.з. – двигатель остановится.
При моменте Мс2 будет достигнута установившаяся скорость спуска, соответствующая точке С. Поскольку якорь теперь вращается в обратную сторону, ЭДС двигателя изменит направление на обратное, то ток: I = (U + E) / R.
37
32. Тормозные режимы трёхфазных асинхронных двигателей.
Торможение с отдачей энергии в сеть |
Торможение противовключением |
Динамическое торможение
38
33.Основные показатели регулирования угловой скорости электропривода.
1. диапазон регулирования угловой скорости отношение максимальной скорости ωmax к минимальной
ωmin.
D = ωmax / ωmin.
2. плавность регулирования характеризует скачок скорости к ближайшей возможной
φ = ωi/ωi−1 где i – ступень регулирования.
3.экономичность регулирования характеризуется затратами на сооружение и эксплуатацию электропривода.
4.стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении момента…
5.направление регулирования скорости.
6.дополнительная нагрузка двигателя – наибольшее значение момента, который двигатель способен развивать длительно при работе на регулировочных характеристиках.
Изменение нагрузочного момента в зависимости от скорости у различных производителей механизмов различно.
Дополнительные нагрузки двигателя ограничивается степенью его нагрева. Степень нагрева зависит от потерь энергии в двигателе, а они определяются главным образом током, потребляемым двигателем.
39
34.Методы регулирования ДПТ.
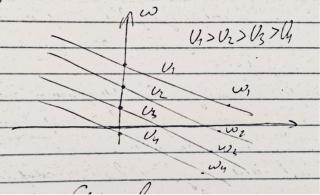
1. изменение напряжения.
А) диапазон D = 8 … 10 в разомкнутых системах регулирования, в замкнутых – 1000
Б) вниз от естественной.
2. система привода магнитный усилитель
- двигатель (МУ –Д )
3.тиристорный регулятор напряжения двигателя (ТРНД)
4.Изменение потока Ф.
5.Включение добавочного сопротивления.
40