

Глава 4. Управление судном в условиях ветра
Силы и моменты, связанные с воздействием ветра
Сила ветра оценивается в баллах двенадцатибалльной шкалы, приведенной в МТ-75.
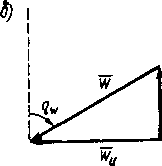
Скорость ветра в судовых условиях измеряется над верхним мостиком с помощью анемометра. При этом измеряется так называемая кажущаяся скорость ветра UP, вектор которой представляет собой разность двух векторов — вектора истинного ветра ТГИи вектора скорости судна Р, т. е.
W = Wh-V. (4.1)
Вектор кажущегося ветра, помимо скорости, характеризуется курсовым углом qw,т. е. углом между носовой частью ДП и кажущимся направлением ветра. За направление ветра принимается то, откуда дует ветер (ветер дует «в компас»).
Курсовые углы ветра измеряются от 0 до 180°вправо и влево от ДП (курсовые углы правого или левого борта).
Геометрический смысл формулы (4.1)характеризуется векторным треугольником, показанным на рис. 4.1 (а, б, в). Из рисунка видно, что под влиянием движения судна вперед со скоростьюVкурсовой угол кажущегося ветра будет всегда меньше, чем истинного.
Аэродинамическая сила и ее момент. Равнодействующая сила давления ветра на надводную часть — аэродинамическая силаАне совпадает в общем случае с направлением кажущегося ветра, а отклоняется в сторону траверзного направления (см. п.1.1).
Надводная часть судна находится в потоке воздуха под углом атаки, равным курсовому углу кажущегося ветра. При этом на надводной части создается аэродинамическая сила А, имеющая, как показано на рис.4.2,продольнуюАхи поперечнуюАусоставляющие.
Продольная составляющая Ахвлияет на скорость судна, а поперечнаяАувызывает боковое перемещение судна.
Поперечную аэродинамическую силу (Н) можно рассчитать по формуле
(4.2)
где Со* — безразмерный коэффициент поперечной аэродинамической силы, зависящий от формы надводной части судна и курсового угла кажущегося ветра;
Qy— боковая площадь парусности (площадь проекции надводной части на ДП), м2;
Рис.
4.1.
Курсовой угол кажущегося ветра на
движущемся судне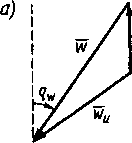

Безразмерный аэродинамический коэффициент Саупо данным натурных и модельных исследований для разных судов находится обычно в пределах от 0,8sinqwдо 1,3sinqw.
с?
К
А
L
w
Рис.
4.2.
Аэродинамическая сила и ее составляющие
Таким образом, в общем случае на корпус судна действует не только поперечная аэродинамическая сила, вызывающая дрейф судна, но и момент этой силы, стремящийся развернуть судно вокруг вертикальной оси, проходящей через ЦТ.
Плечо поперечной аэродинамической силы 1Лотносительно ЦТ можно определить по приближенной формуле:
(4.3)
/д-0,25+ L ^
где 7а —- относительное плечо аэродинамической силы, выраженное в долях длины кор-
.к. (‘л- -£);
L—длина судна между перпендикулярами, м;
/цп — отстояние ЦП от Цт, м.
В формуле (4.3)величина /цппринимается положительной, если ЦП смещен в нос от ЦТ, и отрицательной при его смещении в корму. Знак величины /л укажет соответственно направление смещения точки приложения аэродинамической силы от ЦТ.
Положение ЦП по длине судна /цпзависит от размеров и расположения надстроек и других надводных частей, а также от дифферента судна и его осадки. Площадь парусности и положение ЦП по длине судна можно рассчитать по чертежу бокового вида судна с учетом масштаба. При этом следует иметь в виду, что положение ЦП значительно изменяется с изменением дифферента судна.
При определении отстояния ЦП от ЦТ для (4.3)необходимо учитывать положение ЦТ по длине, которое только при .посадке судна на «ровный киль» приблизительно совпадает с мидель-шпангоутом. Если ЦТ смещен в сторону одной из оконечностей судна, то благодаря дифференту ЦП смещается в противоположную сторону, что приводит к существенному изменению /ц„ и, следовательно, /д.
Аэродинамический момент Мл=Лу1лстремится развернуть судно относительно вертикальной оси в направлении уваливания наветренной оконечности судна.
Гидродинамическая сила и ее момент. Поперечная аэродинамическая силаАусоздает боковое перемещение судна — дрейф со скоро-
стыо Vy, в результате чегокорпуссуднадвижется суглом дрейфа а.
В этих условиях корпус судна испытывает сопротивление со стороны воды в виде гидродинамической силы /?, имеющей поперечную составляющую Ry.
Подводная часть судна характеризуется площадью проекции погруженной части на ДГ1.Эту площадьSyдля приближенных оценок можно принимать равной произведению длины судна между перпендикулярами на среднюю осадку.
При движении судна лагом, когда о=90°,точка приложения силы реакции воды (гидродинамической силы Л) носит название центра бокового сопротивления(ЦБС).
Приближенно можно считать, что ЦБС совпадает с центром площади проекции погруженной части судна на ДП, а по длине судна практически совпадает с ЦТ.
При посадке судна на ровный киль ЦБС, как и ЦТ, примерно совпадает с мидель-шпангоутом, а при наличии дифферента отстояние ЦБС от мидель-шпангоута можно приближенно рассчитать по формуле
7- _о,5,
цвс3 (1 —d„/d„)
где /цБС — расстояние ЦБС от мидель-шпангоута, выраженное в долях длины судна L; ёы —- осадка носа, м; dm -- осадка нормы, м.
Знак «—» у 7цбс укажет, что ЦБС смещено в корму от ми- дель-шпангоута, а знак «+» — в нос.
Если угол дрейфа не равен 90°, то точка приложения гидродинамической силы смещается по ДП в направлении движения, т. е. навстречу набегающему потоку воды. Если угол дрейфа меньше 90°, то точка приложения смещается от ЦБС в сторону носа, а при угле дрейфа более 90° — в сторону кормы, т. е. смещение точки приложения гидродинамической силы имеет ту же закономерность, что и для аэродинамической. Однако величина смещения точки приложения гидродинамической силы примерно в 2 раза больше, чем аэродинамической при одинаковых углах атаки (а=?»),что объясняется более совершенными обводами подводной части и, следовательно, более выраженным проявлением свойств крыла.
Плечо поперечной гидродинамической силы относительно ЦТ можно приближенно рассчитывать по формуле
где 1н — относительное плечо поперечной гидродинамической силы, выраженное в долях длины корпуса -^rj;
/цвс — отстояние ЦБС от ЦТ, м.
В соответствии сформулой(4.4)точка приложения гидродинамической силы имеет максимальное смещение при углах дрейфа, близких к 0 и180°,когда это смещение достигает±0,51,т. е. точка приложения приближается к носовому или кормовому перпендикуляру.
Угол дрейфа, близкий к 180®,судно может иметь при движении назад.
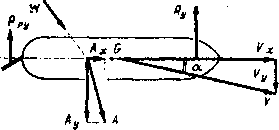
Рис. 4.3. Силы, действующие на судно при движении с углом дрейфа
(4.5)
MR =/?* iR,
Поперечная гидродинамическая сила Ryв Н рассчитывается по формуле*
(4.6)
где р — массовая плотность забортной воды, кг/м3;
S- — площадь проекции подводной части судна на ДП, м2;
—* скорость судна относительно воды, м/с;
Cv— безразмерный коэффициент поперечной гидродинамической силы, значение ко-
торого можно выразить приближенной зависимостью 0,23sinct-f l,09sin2cc
(4.7)
(2,16—7d/L)*
где 6 — коэффициент общей полноты; d/L — отношение средней осадки судна к его длине.
Очевидно, что формулы (4.3) и (4.4)структурно подобны. Следует лишь еще раз отметить, что ЦБС располагается по длине судна всегда сравнительно близко от ЦТ, поэтому в практических расчетах допустимо/ЦБСпринимать равным нулю, в то время как/11Пможет иметь значительную величину.
Ветровой дрейф
Условия движения судна постоянным курсом с углом ветрового дрейфа выражаются вторым и третьим уравнениями системы (1.1), которые для случая установившегося движения, когда инерционные силы и момент равны нулю, можно записать в следующем виде:
![]()
(4.8)
Ветер, дующий со скоростью Wпод произвольным курсовым углом, воздействует на надводную часть судна силойА,которую в общем случае можно разложить (рис.4.3)на две составляющие: продольнуюАхи поперечнуюАу.
Продольная составляющая Ах, складываясь алгебраически с силой сопротивления Я*, увеличивает или уменьшает скорость движения суднаVx. Эта скорость учитывается лагом, поэтому силуАхможно не рассматривать.
Сила Ау,действующая перпендикулярно ДП, заставляет судно смещаться в поперечном направлении со скоростьюV»называемой скоростью дрейфа. В данных условиях направление и скорость дейст
вительного перемещения судна относительно воды определяются вектором V, который является геометрической суммой векторовVxиVv (см. рис.4.3).
Непосредственно из приведенной схемы следует
tga= ~;V*
• (4.9)
Vx cos а
Для получения формулы угла дрейфа можно воспользоваться первым уравнением системы (4.8)на том основании, что гидродинамическая силаRvсогласно(4.7)зависит от угла дрейфа.
Боковая сила руля Рру, возникающая в связи с перекладкой руля для удержания судна на курсе, по сравнению с силойRvпри движении с углом дрейфа относительно невелика, поэтому ее в первом приближении можно не учитывать и тогда
R.y = Ау,
а после подстановки значений (4.2) и (4.6)
Су Y +- са„ -|2-Q„ V.(4.10)
По данным, приведенным в п. 4.1,можно принять значение аэродинамического коэффициента
Спу= 1,18 sin^ц). (4.11)
Подстановка в уравнение (4.10)выражений(4.8) и (4.11)приводит к квадратному уравнению относительноsinа. Решение этого уравнения с последующим переходом от скорости относительно воды V, выраженной вм/с,к скорости по курсуУл%выраженной в уз
[V
л
= —q'§п~
)’инекоторые упрощающие
преобразования дают рабочую формулу
для определения угла дрейфа
|/ (О.ПКл)1 + ^ —0,\\Vji
tg«- % . (4.12)
ул
где W — скорость кажущегося ветра, м/с;
Vя — скорость судна по курсу, уз;
к —коэффициент дрейфа, который можно рассчитывать по приближенной форму* ле
*о-(0.1М-0.в£)|/Г «'3)
Сопоставление с формулой (4.9)показывает, что числитель формулы(4.12)выражает скорость бокового перемещения судна под влиянием ветра (скорости дрейфа), а знаменатель — скорость судна по курсу.
Из формулы (4.12)видно, что скорость дрейфаV'vзависит от скорости по курсуVA:чем больше Ул, тем меньшеVyпри тех же значенияхWиqv.
Для практического применения полученной формулы следует учесть еще то обстоятельство, что скорость ветра вблизи поверхности моря за счет трения нижнего слоя воздуха о поверхность воды меньше, чем в более высоких слоях. Поскольку измерение скорости ветра анемометром выполняется на высоте мостика, то результаты оказываются несколько завышенными по сравнению со средней скоростью ветра, воздействующего на надводную часть.
Профиль скоростей ветра на высоте подчиняется логарифмическому закону, из которого вытекает, что для получения эквивалентного давления скорость ветра, измеренная над верхним мостиком, должна быть умножена на коэффициент 0,83,т. е.
1Р = 0,83Г\ (4.14)
где № —эквивалентная скорость кажущегося ветра для использования в формуле (4.12), м/с;
W' — скорость кажущегося ветра, измеренная анемометром над верхним мостиком, м/с.
Опыт практического использования формулы (4.12)на различных судах показывает, что предвычисление угла дрейфа обеспечивается с точностью1—2°,что примерно соответствует точности графического счисления пути судна.
Угол дрейфа по формуле (4.12)в условиях плавания легко рассчитывать с помощью калькулятора. При этом следует иметь в виду, что коэффициент дрейфаkaдля каждого конкретного судна зависит только от его осадки, поэтому значения коэффициента целесообразно заранее рассчитать для рабочего диапазона осадок судна с интервалом, например, через 1 м и использовать то значение £а, которое соответствует средней осадке на данный период плавания. Переменными величинами будут скорость кажущегося ветраWвм/с,его курсовой уголqw и скорость суднаУл, уз.
Наиболее просто угол дрейфа может быть получен из специальных таблиц дрейфа, рассчитанных по формулам (4.12)с учетом(4.13) и (4.14).Предлагаемые таблицы приведены в прил. 1 и состоят из трех таблиц. Определение угла дрейфа по ним сводится к последовательной выборке из трех таблиц (необходимая интерполяция выполняется «на глаз»).
Таблицы дрейфа являются универсальными и могут быть использованы на любом судне по заранее вычисленным значениям kaдля разных осадок.
Влияние переложенного руля на угол дрейфа. При определении угла дрейфа по формуле (4.12),а также с помощью таблиц или номограммы, построенных по указанной формуле, не учитывается тот факт, что под действием аэро- и гидродинамической сил, точки приложения которых в общем случае не совпадают с ЦТ судна, последнее имеет тенденцию разворачиваться вокруг вертикальной оси, т. е. приводиться к ветру или уваливать в зависимости от знака результирующего момента действующих сил.
Чтобы обеспечить движение заданным курсом, приходится перекладывать руль на некоторый средний угол, т. е. создавать момент боковой силы руля для компенсации результирующего момента аэро- и гидродинамической сил. При этом поперечная сила руля PPV,складываясь алгебраически с поперечной аэродинамической силойАу, увеличивает или уменьшает скорость бокового перемещения суднаVv% что приводит к изменению угла дрейфа а на величину Да, которая зависит от отношения площадей руля и погруженной части ДП —Sp/Sy.
Для морских транспортных судов можно приблизительно считать, что в среднем
(4.15)
43
дрешра
V
Рис. 4.4. Силы и моменты» действующие на судно в свободном дрейфе
Учесть влияние перекладки руля на угол дрейфа можно с помощью приближенной формулы, полученной с учетом (4.!5),
Ла°= =F0,26р. (4.16)
Из приведенной формулы видно, что на каждые 5° перекладки руля угол дрейфа изменяется приблизительно на 1°. При перекладке руля под вегер (судно стремится к ветру) абсолютное значение угла дрейфа уменьшается на величину Ла°. Если же судно уваливает, и приходится руль перекладывать на ветер, то значение угла дрейфа соответственно возрастает.
Дрейф судна с остановленными двигателями. Иногда судну прихо дится длительное время находиться в море с остановленными двигате лями (ожидание светлого времени, неисправность двигателя, ожидание распоряжений и т.п.).При наличии ветра судно в данных обстоятельствах дрейфует с некоторой скоростью, направление которой в общем случае не совпадаетс направлением действующего ветра.
При установившемся дрейфе аэродинамическая сила Ауравновешивается гидродинамической силойR.Для равновесия судна по курсу необходимо, чтобы аэро- и гидродинамическая силы действовали в одной плоскости. При этом условии аэро- и гидродинамический моменты уравновешивают друг друга.
Указанному условию соответствуют положения судна носом или кормой строго против ветра, однако это случаи неустойчивого равновесия, так как при любом случайном отклонении ДП от данного направления возникает поперечная аэродинамическая сила, момент которой стремится развернуть судно еще больше от линии ветра. Одновременно возникает поперечная гидродинамическая сила, момент которой разворачивает судно в том же направлении, что и аэродинамический момент (рис. 4.4).
Действующие при свободном дрейфе силы и их моменты стремятся развернуть судно приблизительно лагом к ветру, следовательно, где-то вблизи этого направления и должно быть положение устойчивого равновесия. Данный вывод подтверждается опытом: суда в установившемся свободном дрейфе располагаются примерно лагом к ветру.
Аналитическое определение условий устойчивого свободного дрейфа выражается системой трех уравнений (1.1),которые для случая установившегося режима, т. е. при отсутствии инерционных сил, а также равенства нулю силы упора винта и силы на руле, имеют вид:
Rx—^xl |
RV=AV; (4.17)
Система (4.17)выражает условие равновесия аэро- и гидродинамических сил по осямXи К, а также равновесие аэро- и гидродинамического моментов вокруг осиZ.
Продольная гидродинамическая сила Rxвыражается зависимостью:
= (4.18)
где Сж —коэффициент продольной гидродинамической силы, который для движения с углом дреАфа может быть получен по эмпирической формуле
С, = 0,075 sin ^168»^ <4Л9>
Продольная аэродинамическая сила Ахвыражается приближенной формулой:
А* ~ 1.3-Ё2-<?«*’* cos V»-.(4.20)
где Qx — лобовая площадь парусности, м2.
Ранее были приведены формулы для выражения поперечных сил и их коэффициентов: (4.2), (4.6), (4.7) и (4.11).
Условие равновесия одновременно по осям Xи У можно получить, если поделить второе уравнение на первое системы(4.17):
4L- (4 2|)
Дат Л*
Подставляя в найденное условие выражения (4.2), (4.6), (4.18) и (4.20),окончательно получим
. 0,23 sin a-f 1,09 sin» а Qx
(*.,«-ТТ)0.075S.*
Полученное выражение дает возможность для любого значения угла дрейфа а определить значение курсового угла ветра qWtпри котором обеспечивается равновесие сил по продольной и поперечной осям одновременно. I
Второе условие устойчивого свободного дрейфа выражается равновесием аэро- и гидродинамического моментов относительно вертикальной оси, проходящей через ЦТ судна.
Если разделить третье уравнение на второе системы (4.17),то, учитывая, что отношение момента к силе равняется плечу этой силы, получим указанное условие в виде равенства плеч аэро- и гидродинамической сил
(4.23)
Рис. 4.5. Положение судна при свободном дрейфе в зависимости от знака смещения ЦП от ЦТ:
а— ЦП смещен в нос от ЦТ;б— ЦП смешен в корму от ЦТ
Подставляя значения плеч из формул (4.3) и (4.4)и учитывая при этом, что ЦБС располагается, как правило, достаточно близко к ЦТ судна(/ЦБС«0),получим окончательно второе условие равновесия при свободном дрейфе
,; = 2(«° -45° + 1807ц„). (4.24)
Положение устойчивого равновесия при дрейфе с остановленными двигателями будет иметь место при одновременном выполнении двух условий, выражаемых формулами (4.22) и (4.24).
На большинстве морских судов коэффициент ftнаходится в пределах0,6—0,8,а отношениеd)L— в пределах0,03—0,07,поэтому можно приближенно принять средние постоянные значения:
0,7; d/L=0,5.
С учетом принятых значений по формулам (4.22) и (4.24)построена номограмма для определенияq°wи а° поQVIQXи7ц„,приведенная в прил. 2.
Номограмма показывает, что при больших значениях 7ЦПнаправление свободного дрейфа может существенно отличаться от направления ветра (порядка до20°),что следует учитывать на практике.
Положения судна при свободном дрейфе в зависимости от знака 7ЦПи действующей силы показаны на рис.4.5.
При свободном дрейфе практически важно знать не только направление движения, но и скорость судна относительно воды V.
Из приведенной схемы (см. рис. 4.5)видно, что
у_ V* _ ^ (4 251
cos (90°— a0) sin а *
где vv — поперечная составляющая скорости судна.
Поперечная составляющая скорости Vvсоответствует скорости дрейфа «на стопе»Кв0,которую можно получить по таблицам дрейфа (см. прил. 1).
Маневрирование в условиях ветра
При маневрировании в условиях ветра внешние силы и их моменты, особенно при небольших скоростях движения, сопоставимы с силами и моментами средств управления (руля и винта), а нередко и превосходят их, что затрудняет или делает даже невозможным выполнение того или иного маневра из-за резкого ухудшения или потери управляемости.
Для оценки и прогнозирования поведения судна при маневрировании в условиях ветра воспользуемся уже известными нам обшими закономерностями отдельно для аэро- и гидродинамических сил и их моментов.
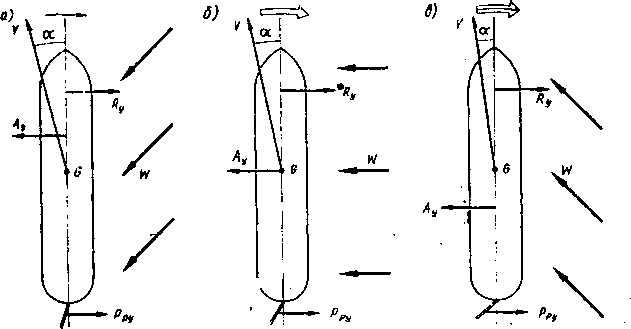
На рис. 4.6 схематически показано действие на судно аэро- и гидродинамических сил в зависимости от курсового угла кажущегося ветра для трех условий.
Точки приложения поперечных сил показаны в соответствии с приближенными формулами (4.3) и (4.4)для плеч аэро- и гидродинамической сил соответственно. При этом для простоты сделано допущение, что ЦП и ЦТ совпадают по длине судна и находятся в точкеG (такое допущение достаточно справедливо для судов без дифферента с надстройкой, расположенной посредине, а также для судов с кормовым расположением надстройки, но имеющих такой дифферент^на корму, при котором ЦП смещен вперед до совпадения с ЦТ судна).
Рассмотрим подробнее каждый из трех случаев (см. рис. 4.6).
Ветер со стороны носовых курсовых углов. Поток воздуха, действующий на надводную часть судна, имеющего скоростьvx>со стороны носового курсового угла (см. рис.4.6,а)создает поперечную аэродинамическую силуАу.Точка ее приложения в соответствии с формулой
смещена от ЦТ вперед по ДП, т. е. навстречу потоку воздуха, на расстояние 1л. В связи с этим создается моментАу1а, стремящийся развернуть судно в направлении увеличенияqu-%т. е. носом от ветра. В то же время силаАисоздает поперечное движение со скоростью
Рис.
4.6.
Силы и моменты, действующие на судно
в зависимости от курсового угла
кажущегося ветра: a)
45*;
б)
qw—
90е:
*) V»*I35*
V„,благодаря чему судно движется относительно воды с углом дрейфаа.
Косое натекание потока воды на подводную часть корпуса с углом атаки, равным углу дрейфа, приводит к появлению поперечной гидродинамической силы Rv, точка приложения которой смещена от ЦТ вперед до ДП навстречу потоку в соответствии с формулой(4.4) на расстояние /д. Гидродинамический моментRvIrстремится развернуть судно в направлении увеличения угла дрейфа, т. е. носом к ветру.
Таким образом, очевидно, что аэро- и гидродинамический моменты в рассматриваемом случае имеют разные знаки. Если при этом учесть, что силы АуиRvуравновешивают друг друга и (если не учитывать сравнительно небольшую боковую силу руляPPJ/)приблизительно равны по абсолютной величине, то сравнительные величины их моментов полностью определяются значениями плеч1Аи /*.
Величины этих плеч, как известно, зависят от углов атаки q°wи а°. Чем меньше угол, тем больше плечо, причем при одинаковых углах атаки величина смещения точки приложения гидродинамической силы примерно в 2 раза больше, чем аэродинамической. Угол дрейфа а° в большинстве случаев не очень велик, поэтому даже при достаточно остром курсовом угле ветраq°wплечо гидродинамической силы /д, как правило, больше плеча аэродинамической силы /А. Следовательно, при сложении двух моментов, имеющих разные знаки, результирующий момент имеет то же направление, что и гидродинамический, т. е. стремится разворачивать судно носом в направлении к ветру. Указанная тенденция отмечена стрелкой.
Результирующий момент при носовых курсовых углах ветра является разностью аэро- и гидродинамического моментов, поэтому он обычно не очень велик, что позволяет удерживать судно на заданном курсе с помощью переложенного на некоторый угол руля, создающего
поперечную силу Рруи моментМР=РР(/-^-.
Следует, однако, отметить, что при сильном ветре результирующий момент, разворачивающий нос судна на ветер, будет все же значительным по величине, и если скорость судна при этом невелика, то момент руля, пропорциональный квадрату скорости судна, может оказаться недостаточным для удержания судна на курсе.
Явление, связанное с невозможностью предотвратить разворот судна на ветер, назовем условно потерей управляемости первого рода.
При очень сильном ветре или очень малой скорости судна возникает большой угол дрейфа (напомним, что угол дрейфа пропорционален отношению скорости кажущегося ветра и скорости судна по курсу— W/V.v),что приводит к уменьшению плеча гидродинамической силы /я, т. е. к сближению точек приложения поперечных аэро- и гидродинамической сил. При этом результирующий момент становится меньше, и судно снова обретает способность удерживаться на заданном курсе.
При дальнейшем увеличении отношения W/Vxи возрастании угла дрейфа наступает ситуация, когда плечо гидродинамической силыlR становится меньше плеча аэродинамической силы /Аи судно вместо наблюдавшегося ранее стремления к ветру, начинает проявлять тенденцию уваливать под ветер. Для удержания на курсе в этой ситуации потребуется уже перекладка руля не под ветер, а на ветер.
Дальнейшее увеличение отношения W/Vxи угла дрейфа приводит в конечном счете к невозможности удерживать судно от уваливания под ветер, и наступает потеря управляемости второго рода.
Таким образом, при движении на носовых курсовых углах ветра по мере возрастания отношения WJVXfнапример, за счет снижения скоростиVxсудно сначала испытывает потерю управляемости первого рода, затем снова становится управляемым и, наконец, попадает в зону потери управляемости второго рода.
Отметим, что при достаточно острых носовых курсовых углах ветра судно может, минуя зону потери управляемости первого рода, сохранять способность удерживаться на курсе вплоть до потери управляемости второго рода.
Ветер в борт. При направлении ветра прямо в борт судна (рис.4.6,6)точка приложения поперечной аэродинамической силы совпадает с ЦП, поэтому для рассматриваемого случая, когда ЦП совпадает с ЦТ, плечо аэродинамической силы равно нулю, т. е. аэродинамический момент отсутствует.
Под действием гидродинамического момента нос судна стремится развернуться в сторону ветра. В отличие от предыдущего случая стремление судна приводиться к ветру выражено более сильно, так как отсутствует аэродинамический момент обратного знака. На рис.
бэта увеличенная тенденция показана двумя стрелками.
Для удержания на курсе в данной ситуации потребуется перекладка руля под ветер на больший угол, чем это имело место в случае носовых курсовых углов при прочих равных условиях.
Естественно также, что при ветре в борт судна произойдет потеря управляемости первого рода при меньшем значении отношения W/Vx, чем это имело место при носовых курсовых углах ветра.
При ветре в борт потеря управляемости второго рода не наступает. В случае остановки двигателя судно остается в положении лагом к ветру, т. е. переходит к дрейфу на стопе.
Ветер со стороны кормовых курсовых углов. При набегании потока воздуха со стороны кормовых углов (рис.4.6,в)точка приложения поперечной аэродинамической силы смещается на величину плеча /А, котороев данном случаев соответствии с формулой(4.3)будет иметь отрицательное значение, что указывает на смещение в сторону кормы.
Так как аэро- и гидродинамическая силы, направленные в противоположные стороны, в рассматриваемом случае имеют плечи разного знака, то очевидно, что их моменты будут направлены в одном и том же направлении. Следовательно, результирующий момент будет равен их сумме.
Последний случай по сравнению с ранее рассмотренными характеризуется максимальным моментом, разворачивающим судно носом к ветру, что показано на рисунке тремя стрелками (см. рис. 4.6,в). В этом случае для удержания судна на курсе требуются большие углы перекладки руля под ветер, а потеря управляемости первого рода наступает при относительно малом значении отношенияW/Vx.Потеря управляемости второго рода при кормовых курсовых углах не наблюдается.
Приведенные выше оценки позволяют представить общую картину поведения судна при маневрировании в условиях ветра, т. е. носят качественный характер. Количественные оценки управляемости конкретного судна при маневрировании в условиях ветра могут быть получены расчетным путем.
Расчетное определение управляемости в условиях ветра. Для
аналитического определения условий потери управляемости при маневрировании необходимо выполнить совместное решение второго и третьего уравнений системы (1.1)для установившегося движения, т. е. при отсутствии инерционных сил в уравнениях должны быть оставлены аэро- и гидродинамическая силы на корпусе и их моменты, а также сила и момент на руле.
С учетом сказанного, уравнения могут быть записаны в виде:
(4.26)
В системе (4.26)разные знаки у поперечных аэро- и гидродинамических сил указывают, что эти силы всегда направлены противоположно друг другу, а двойной знак у силы руля указывает, что руль может быть переложен как на ветер, так и под ветер.
Двойной знак у аэродинамического момента показывает, что этот момент по направлению может совпадать или не совпадать с гидродинамическим моментом, что зависит от положения точек приложения сил АуиRvотносительно ЦТ судна. Знаком результирующего момента определяется сторона перекладки руля. Руль должен быть переложен таким образом, чтобы его момент компенсировал результирующий момент аэро- и гидродинамической сил на корпусе.
Система (4.26)выражает одновременно два условия: равновесие сил в поперечной плоскости и равновесие моментов этих сил относительно вертикальной оси, проходящей через ЦТ судна.
При практических расчетах аэродинамическую силу Ауможно определять по формуле(4.2),а ее плечо — по формуле(4.3).Гидродинамическая силаRyопределяется формулой(4.6),а ее плечо формулой(4.4).
Боковая сила руля
![]()
(4.27)
где Sp— площадь пера руля, м2;
Сpv— коэффициент подъемной силы руля, который можно приближенно рассчитать по формуле,
где Хр— относительное удлинение пера руля, определяемое по формуле(2.6); б — угол перекладки руля, град.
Формула (4.27)дает приблизительно верный результат для руля, не попадающего в струю от винта (например, на двухвинтовом судне с рулем вДП).Если же руль находится за винтом, то его эффективность повышается в зависимости от так называемой нагрузки винта по упору, которая в теории корабля учитывается введением специального коэффициента, зависящего от силы упора винта, его диаметра, а также скорости судна. Для приближенных практических расчетов можно для руля, расположенного за винтом, увеличить результат, даваемый формулой(4.28), в 1,6—2раза, либо соответственно увеличить площадь пера руля, введя понятиеэффективной площади пера руля.
Сущность совместного решения системы (4.26)заключается в нахождении такого значенияW/Vx(при выбранном курсовом угле вет-
Рис.
4.7.
Зоны управляемости балкера «Харитон
Греку» при плавании в условиях ветра:
а
— в грузу; б
— в балласте

ра), которое обеспечивало бы равновесие моментов вокруг вертикальной оси, чем определяется граничное условие потери управляемости.
Эта задача решается путем определения по первому уравнению
угла дрейфа а° с учетом переложенного руля для различных значений W/Vxпри выбранномq°w, а затем, используя те же значенияW/yx и найденные по ним значения а°, проверяется условие равновесия моментов по второму уравнению(4.26).
От угла дрейфа зависят гидродинамическая сила и ее плечо, а значит гидродинамический момент Мп.Следовательно, можно найти такое значение о°, при котором выполняется условие равновесия моментов.
Если при данном курсовом угле ветра для данного судна существует потеря управляемости как первого, так и второго рода, то описанное решение позволяет найти два условия равновесия: одно для руля, переложенного под ветер, а второе — на ветер.
Угол перекладки руля 6°ррекомендуется принимать при расчетах равным 20° вместо перекладки на борт(30—35),так как необходимо иметь некоторый резерв, требуемый для выравнивания рыскания судна.
Такие расчеты были выполнены на ЭВМ для балкера длиной 200 м с кормовым расположением надстройки в грузу (d„=cfK= = 12,33м)и в балласте(й„=5,5 м; dK=8,15м).При указанных посадках ЦП в грузу располагается:на13,1м в корму от ЦТ(/цп==—0,066),а в балласте практически совпадает с ЦТ(7ЦП«0). Положение ЦБС принято совпадающим по длине с ЦТ(7цвс=0). Площадь парусности в грузу принята равной1975м2,а в балласте3075м*.
Результаты выполненных {расчетов представлены на рис. 4.7 в координатах q°w—W/Vxв виде кривых, ограничивающих зоны потери управляемости(ЗПУ).На этих линиях через каждые 15° курсового угла указаны значения углов дрейфа, которые будет иметь судно при соответствующих значенияхW/Vxиq°w.
Диаграмма позволяет предсказывать поведение судна, попавшего в ЗПУ. Так, если судно окажется в ЗПУ I рода (см. рис. 4.7,а), то оно начнет приводиться к ветру, что на диаграмме выразится пере- мещением точки влево до границы данной зоны, т. е. до такого значенияq°mна котором судно обретет способность удерживаться с помощью руля, переложенного на 20° под ветер. Если же судно окажется в ЗПУ II рода, то оно начнет уваливать, что выразится на диаграмме перемещением точки вправо до границы этой зоны, т. е. до значенияq°w, на котором судно может удерживаться рулем, переложенным на 20° к ветру.
Пунктирные линии между ЗПУ определяют значения W/Vx,при которых судно способно удерживаться на данныхq°wбез перекладки руля на какой-либо средний угол.
Отметим, что в грузу при любых значениях q°w(см. рис.4.7,а) сначала наблюдается потеря управляемости I рода, т. е. судно приводится к ветру. Потеря управляемости II рода наступает лишь при весьма больших значениях отношенияW/Vx.Такое поведение судна в грузу обусловлено существенным смещением ЦП в корму от ЦТ. В балласте же, когд* ЦП находится вблизи ЦТ, на носовых курсовых углах ветра ЗПУ I рода не наступает вовсе (см. рис.4.7,6).
Приведенная диаграмма дает лишь ориентировочные значения, так как она рассчитана по приближенным зависимостям. Тем не менее диаграмма позволяет получить наглядное представление об общем характере поведения судна при маневрировании в условиях ветра.
Контрольные вопросы. 1. Где располагается по длине судна точка приложения поперечной аэродинамической силы в зависимости от курсового угла кажущегося ветра? 2. Какое влияние оказывает руль на угол дрейфа при движении судна постоянным курсом? 3. Как располагаются суда по отношению к направлению ветра при дрейфе с остановленными машинами? 4. Каково общее условие сохранения управляемости судна при плавании в условиях ветра? 5. Каковы условия потери управляемости судна при небольшой силе ветра? в. При каких курсовых углах ветра наиболее вероятна потеря управляемости I рода?
Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах
Для эффективного управления судном при маневрировании в стесненных условиях, помимо знания общих закономерностей поведения судна как объекта управления, необходимо знать основные свойства конкретного судна, относящиеся в первую очередь к его ходкости, поворотливости и инерционно-тормозным характеристикам.
Эти свойства обычно называют маневренными элементами.
Информация о маневренных элементах судна в виде таблицы вывешивается в ходовой рубке на мостике судна.
До 70-хгг. форма и содержание таблицы маневренных элементов определялись в каждой стране национальными правилами или традициями.
В 1971г. РезолюциейА.209(7)Международной морской организации(ИМО)была принята первая рекомендация, устанавливающая примерный набор сведений, подлежащих включению в таблицу маневренных элементов для вывешивания в ходовой рубке судна.
С учетом рекомендаций ИМО в нашей стране были разработаны правила о форме, содержании, способах и условиях определения маневренных элементов, включенные в Наставления по организации штурманской службы на судах Минморфлота СССР 1978 г. (НШС-76), а затем и вНШС-82._
В ноябре 1987г. РезолюциейА.601 (15)ИМО была принята новая рекомендация, в соответствии с которой информация о маневренных характеристиках судна должна состоять из трех частей:
лоцманской карточки, вручаемой лоцману по прибытии его на борт;
таблицы маневренных характеристик (для ходовой рубки); формуляра маневренных характеристик.
Предполагается, что требования о форме и содержании маневренных характеристик войдут в новое Наставление, которое разрабатывается вместо НШС-82.
Определение маневренных элементов из натурных испытаний
Натурные методы определения основных маневренных элементов основаны на последовательных определениях места судна по каким- либо ориентирам в процессе выполнения заданных маневров. Обсервации по-возможности выполняются через короткие промежутки времени, засекаемые с помощью секундомера, пущенного в начале маневра. После окончания наблюдений обсервованные точки наносят в масштабе на планшет и соединяют плавной линией, т. е. получают траекторию судна в процессе любого выполненного маневра. Такая траектория позволяет снять в принятом масштабе нужные элементы маневрирования, а замеченные по секундомеру моменты дают возможность получить соответствующие временные характеристики.
Достоинством такого метода является наглядность и возможность обнаружения промаха, если таковой был допущен при какой-то обсервации.
Необходимость определения маневренных элементов с достаточной точностью ограничивает выбор способов траекторных измерений. Традиционные в навигации способы обсервации по береговым ориентирам для этой задачи мало подходят, так как при удалении от берега на расстояние более 1 мили точность обсерваций оказывается уже недостаточной. Кроме того, глубины в районе маневрирования должны быть достаточно большими, чтобы исключить влияние мелководья, а сам район не должен находиться на пути движения других судов во избежание ситуации опасного сближения.
Необходимость выполнения всех перечисленных условий затрудняет выбор подходящего полигона, поэтому определение маневренных элементов на достаточном удалении от берега более предпочтительно, Рассмотрим некоторые способы траекторных измерений, применяемые для определения маневренных элементов. *
Наблюдения спомощью фазовой РНС. Для определения маневренных элементов указанным способом необходимо заранее выбрать район маневрирования в зоне действия одной из цепочек РНС «Дек- ка» с глубинами, превышающими по-возможности осадку судна не менее чем в 2—3 раза. Масштаб издаваемых навигационных карт с сетками гипербол слишком мелок для данной задачи, поэтому следует вычертить планшет для выбранного района в масштабе порядка 1 ; 20 ООО с нанесенной сеткой оцифрованных гипербол, т. е, фрагмент карты, охватывающий акваторию 5X5 морских миль (для малых судов размеры полигона могут быть уменьшены).
Для нанесения на планшет гипербол с достаточной точностью следует учитывать, что ширина точной дорожки dTдля каждой пары станций*
![]()
где Хт— длина волны сравнения для данной пары, м;
— базовый угол.
Длины волн сравнения равны для: «зеленой» пары 1170м,«красной» 880 м, «фиолетовой» 700 м.
Для обсерваций при маневрировании достаточно использовать только две пары станций, гиперболы которых пересекаются под углом, близким к прямому.
В процессе наблюдений следует в любой последовательности выполнить все те маневры, информация о которых включается в таблицу маневренных характеристик, а при наличии времени и благоприятных условий — также и другие маневры, дающие информацию для формуляра (см. п. 5.1).
Для проведения траекторных измерений на мостике, кроме руководителя испытаний, должно находиться по одному наблюдателю у каждого из двух используемых фазометров, наблюдатель у тахометра, а также регистратор с секундомером и заранее подготовленными бланками для записи наблюдений.
Регистратор по команде руководителя перед каждым маневром запускает секундомер и подает команды через интервалы в 15—30с о снятии отсчетов в форме предварительной и исполнительной команды (голосом или свистком) и сразу же записывает на бланке отсчет времени по секундомеру, замеченный на момент отданной им команды, после чего вносит в бланк результаты измерений, сообщаемые наблюдателями в заранее установленной последовательности, например: курс судна (сообщает рулевой), отсчет «красного» фазометра, отсчет «зеленого» фазометра, частота вращения винта.
Во избежание путаницы установленная последовательность сообщений должна строго соблюдаться.
Чтобы не перегружать регистратора, наблюдатель у тахометра может снимать отсчеты оборотов через равные промежутки времени, например, через 10 или 15 с, руководствуясь отдельным сихронно пущенным в начале маневра секундомером, и записывать их на отдельном бланке, не передавая регистратору. Это позволит за счет облегчения работы регистратора сократить промежутки между траек- торными измерениями.
После завершения всех испытаний результаты наблюдений по каждому маневру наносят на планшет и по полученным точкам проводят сглаженную линию, т. е. получают траекторию данного маневра.
Средняя квадратическая погрешность траекторных измерений с помощью фазовой РНС
<5-2>
где 0 — угол между изолиниями (гиперболами), снимаемый с карты (планшета); du d2 — ширина дорожки в районе наблюдений, рассчитывается по формуле (5.1), м; тДф —средняя квадратическая погрешность измерения разности фаз (в долях фазового цикла).
При наиболее благоприятных условиях измерений значение тдфможет быть принято равным0,03.Если еще принять значения фазовых угловYi=s-yar=90°и угол между гиперболами0=90°,то при использовании «красной»(Ят=880м)и «зеленой»(А,т=П70м)пар по формулам(5.1) и (5.2)получим:
о.оз у
М
= t
■—
1/622*4-827»
«32м.
Sin 90°
В реальных же условиях измерений и при менее благоприятных значениях углов у и 0 погрешность траекторных измерений может оказаться в несколько раз больше.
Кроме того, если в районе маневрирования действует неизвестное течение, то траектории маневров окажутся искаженными.
Наблюдения с помощью РЛС. Данный способ основан на опреде* лениях места по пеленгу и дистанции относительно точечного ориентира, находящегося на воде.
В качестве ориентира нужен предмет, хорошо отражающий радиоволны. Этому требованию удовлетворяют буй и веха, снабженные радиолокационным пассивным отражателем или металлическими предметами, его заменяющими. В качестве ориентира можно использовать и судовой рабочий плотик.
Пеленги ориентира можно измерять как с помощью РЛС, так и визуально по оптическому пеленгатору. Визуальные пеленги несколько точнее радиолокационных.
На мостике, кроме руководителя испытаний, должны находиться три наблюдателя: у РЛС, у пеленгатора, у тахометра, а также регистратор с секундомером и бланками для записи наблюдений.
В процессе выполнения маневров через короткие по возможности промежутки времени (15—30с)берут пеленги и дистанции ориентира по исполнительным командам руководителя или регистратора. Регистратор в момент команды замечает и записывает отсчет по секундомеру, а затем вносит в бланк сообщаемые наблюдателями отсчеты в заранее установленной последовательности, например: курс, пеленг, дистанция*
Наблюдатель у тахометра со вторым секундомером ведет самостоятельные измерения с записью на отдельном бланке.
Рекомендуется пускать секундомеры и начинать измерения еще до начала маневра. Несколько предварительных измерений позволят наблюдателям освоиться и войти в ритм, а полученные результаты дадут возможность впоследствии при прокладке проконтролировать надежность траекторных измерений в начале маневра, х
В зависимости от того, какой маневр выполняется, регистратор должен фиксировать моменты отдельных событий, характеризующих данный маневр.
При выполнении торможения с помощью реверса двигателя началом маневра считается момент передачи команды по машинному телеграфу. Затем нужно также зафиксировать момент начала снижения оборотов винта (начало пассивного периода), момент начала вращения винта назад (начало активного периода), а также момент полной остановки судна относительно воды (конец маневра). При выпол-
тренированного наблюдателя 9,7 м, а для менее тренированных 10—10,7м.
 Для
практического достижения высокой
точности траекторных измерений
следует перед началом испытаний на
неподвижном судне тщательно измерить
рулеткой высоту глаза наблюдателя
с точностью 0,1 м, а маневры выполнять
по-воз- можности ближе к плавающему
ориентиру.
Для
практического достижения высокой
точности траекторных измерений
следует перед началом испытаний на
неподвижном судне тщательно измерить
рулеткой высоту глаза наблюдателя
с точностью 0,1 м, а маневры выполнять
по-воз- можности ближе к плавающему
ориентиру.
При измерении углов снижения рекомендуется использовать секстан с ночной трубой, дающей прямовидимое изображение и обладающей большим полем зрения, что облегчает процесс измерений.
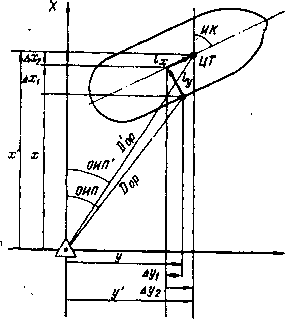
Рис. 5.2. Схема приведения обсерваций Обработка результатов наблю-
к ЦТ судна, выполненных с крыла мос- дений. Вид результатов траектор-тнканых измерений зависит от способа,
с помощью которого они получены. При использовании РЛС результаты получаются в виде попарно измеренных пеленгов и дистанций плавающего ориентира. При этом пеленги взяты с правого или левого крыла мостика, а дистанции — от места расположения антенны РЛС. При наблюдениях по углу снижения результаты получаются в виде пеленгов и углов снижения плавающего ориентира, попарно измеренных приблизительно из одной точки правого или левого крыла мостика (наблюдатель с секстаном и наблюдатель у пеленгатора при наблюдениях находятся рядом).
В таблице маневренных элементов должны быть даны траектории циркуляции ЦТ судна, который может находиться на значительном расстоянии от места выполнения измерений, поэтому перед прокладкой необходимо выполнить нужную аналитическую обработку измерений либо учесть несовпадение ЦТ и места измерений графически при выполнении прокладки (для маневров торможения судна приведение обсерваций к ЦТ особого значения не имеет).
Следует заметить, что приведение к ЦТ обсерваций, полученных по фазовой РНС, нецелесообразно, так как измерения обычно содержат значительные погрешности, поэтому и конечные результаты не могут быть получены с высокой точностью.
Сущность приведения обсерваций к ЦТ судна показана на рис. 5.2 применительно к измерениям обоих навигационных параметров с правого крыла.
При аналитическом приведении к ЦТ рекомендуется одновременно переходить от полярных координат (/7ор, Doр) к прямоугольным (х,у).Начало координат в обоих случаях принимается в точке расположения плавающего ориентира, а осьXсовпадает с направлением меридиана.
В векторной форме процедура приведения обсерваций к ЦТ судна, выполненной с крыла мостика судна, имеет вид
D'op 7х» (5.7)
где Пор — вектор положения крыла мостика, имеющий модуль, равный измеренному расстоянию D0p, и направление, равное обратному пеленгу (П 4-180°);
1У — вектор расстояния от крыла до ДП, имеющий направление, равное К±90® (знак «—» относится к случаю измерений с правого крыла);
±7* — вектор расстояния от мостика до ЦТ, направление которого равно К (знак «+» относится к случаю, когда ЦТ располагается в нос от мостика судна);
D^p— вектор положения ЦТ судна относительно начала координат.
Суммы проекций указанных векторов на координатные оси дают прямоугольные координаты ЦТ судна, численные значения которых рассчитываются по формулам:
х' = дс-Ь Д*1d= Дх,;у'=у+ Ьух± Ду%,
или в развернутом виде:
X* =Dopcos (П+ 180°) 4- ly cos(К =F90°) ± /*cos К; j g
yf = Z^op (П4~ 180°)4~ ly sin (К -Т- 90°) /*з1п K-J
Значения слагаемых по координатным осям в формулах (5.8)понятны из рис.5.2.Приведенные формулы справедливы для любого по* ложения судна относительно ориентира при подстановке соответствующих значений курса К, пеленга П и дистанцииЬ0р.
При обработке наблюдений по углу снижения необходимо сначала рассчитать значение Dopв кабельтовых по формуле(5.5),а затем подставлять полученное значение в формулы(5.8);значения1Уи /* должны быть выражены тоже в кабельтовых.
Если дистанции и пеленги измерены с помощью РЛС, антенна которой расположена в ДП, то при обработке по формулам (5.8)вторые слагаемые нужно исключить(1У=0).
Если же дистанции измерялись по РЛС, а пеленги — по пеленгатору репитера гирокомпаса, то перед использованием формулы (5.8) пеленг нужно исправить поправкой ДП, равной углу, под которым усматривается с места ориентира отрезок расстояния от репитера гирокомпаса до антенны РЛС при данном ракурсе судна. Если репитер и антенна расположены примерно в одной поперечной плоскости на расстоянии /у, то поправку можно рассчитать по формуле:
Дп.=
.^-К^У-п)
57 у> (59)
£>ор »
в которой знак «—» перед 90° соответствует пеленгованию с правого крыла, а знак «+» — с левого.
Поправку с ее знаком нужно прибавить к пеленгу П, после чего исправленное значение пеленга можно подставлять в формулу (5.8). Вторые слагаемые в этом случае также должны быть исключены.
При обработке большого числа траекторных измерений по приведенным выше формулам (с учетом способа наблюдений) удобно пользоваться программируемым калькулятором по заранее составленной и отлаженной программе.
Использование прямоугольных координат упрощает прокладку траектории на планшете из миллиметровой бумаги.
В качестве практического ‘примера определения маневренных элементов ниже приведены в табличной форме результаты траекторных измерений по углу снижения и их обработки для маневра циркуляции вправо с рулем на борту, выполненного 14 июля 1987г. на теплоходе «Большевик М. Томас».
Рис.
5.3.
Траектории маневрирования теплохода
«Большевик М. Томас» при определении
маневренных элементов:

/- остановка судна; // — запуск двигателя назад; III— команда «ПХЗ»;IV — команда «Право на борт»;V— команда «Стоп»
Таблица
5.1.
Циркуляция вправо с рулем на борту
(ПМм — право на борт)
Номера
обсерваций
Время
от начала маневра, мин, с
<
ш
£
*
П.
град
»
*•!
«
.
х
.
ДК.
град
3
о.
о
Q
Прямоугольные
координаты, приведенные к ЦТ
п,
об/мин
Примечание
Xя,
Кб
у\
Кб
1
—1,54
180
170
0*49'
0
7,03
6,78
—
1
,28
25
Измерения
с лево
2
—1,38
181
169
0
56
1
5,25
6,00
—
1,25
97
го
крыла мостика
3
—
1,17
181
166
1
03
1
5,63
5,33
—
1,42
95
4
—0,41
180
160
1
37,5
0
3,79
3,42
-1,36
96
5
—0,26
180
156
1
58
0
3,17
2,76
—
1,35
97
6
0,00
180
142
3
03,5
0
2,09
1,51
—
1,34
96
Право
на борт
7
0,22
192
114
4
23,8
12
4,47
0,48
—
1,43
93
8
0,40
215
82
4
30
35
4,44
—0,28
—
1,55
94
9
0,56
238
66
3
17,2
58
1,95
—0,81
—1,93
93
10
1,28
281
66
2
4,3
101
3,02
—1,26
—2,91
97
Измерения
с пра
1!
1,47
304
70
I
47,2
124
3,47
—1,16
—3,41
98
вого
крыла мости
12
2,12
333
78
1
27,8
158
4,17
—0,77
—4,20
98
ка
13
2,35
0
85
1
22,5
180
4,42
—0,25
--4,46
98
14
3,07
37
96
1
18,8
217
4,61
0,62
—4,54
98
15
3,24
67
104
1
23,6
247
4,36
1,16
—4,13
98
16
3,52
88
109
1
32
268
4,00
1,37
—3,64
98
17
4,17
115
113
1
48,5
295
3,43
1,33
—3,01
98
18
4,53
156
112
2
30
336
2,53
0,80
—2,34
98
Измерения
с лево
19
5,08
173
106
2
51,2
353
2,23
0,47
—2,19
98
го
крыла мостика
20
5,25
191
93
3
11,5
271
2,00
—0,02
—2,08
98
Данные, приведенные в табл. 5.1, содержат как отсчеты, полученные при измерениях, так и рассчитанные по ним дистанции и прямоугольные координаты, приведенные к ЦТ судна.. Даны также углы отворота от начального курса ДК на каждый момент обсервации. Замеченные по секундомеру моменты пересчитаны относительно начала маневра. По рассчитанным прямоугольным кооргдинатам выполнена прокладка на планшете и получена траектория судна при выполнении циркуляции, показанная на рис. 5.3. На этом же планшете построены траектории судна при выполнении маневра пассивного торможения СПХ—ПХЗ. Для краткости данные траекторных измерений по двум указанным маневрам не приведены.
Начало координат для каждого маневра выбирается с таким расчетом, чтобы траектория разместилась в желаемом месте планшета. В рассматриваемом случае (см. рис. 5.3) для маневров пассивного и активного торможения использовано общее начало координат, а для циркуляции выбрано отдельное начало.
Составление судовой информации. Траектории циркуляций судна (см. рис. 5.3) получены по обсервациям, сделанным в произвольные моменты времени. Следовательно, и углы изменения курса в этих точках имеют случайные значения. *
Для получения точек с целочисленными значениями изменения курса и соответствующих этим значениям моментов* времени нужно выполнить приближенную интерполяцию между обсервациями, что позволит отметить нужные точки на траектории и рассчитать соответствующие им моменты времени. Таким путем легко получить все необходимые данные по поворотливости для включения в типовую форму судовой информации.
В принципе таким же способом можно построить и линейные графики торможения. Рекомендуется следующий порядок построения линейных графиков для каждого маневра торможения.
Рис.
5.4. Построение линейного графика
торможения по графикам V(t)
и s{t),
полученным из натурных испытаний
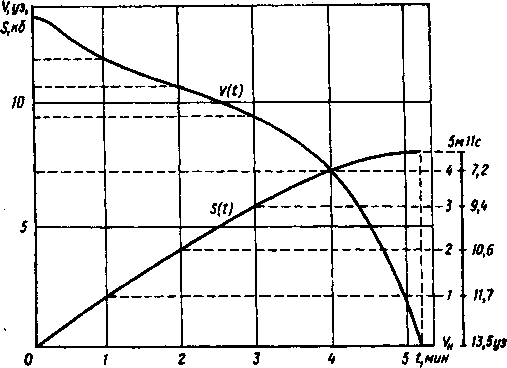
Сначала по обсервованным точкам построить в прямоугольных координатах с помощью лекал сглаженный график s(t). Затем, снимая с этого графика отрезки пути, через равные промежутки времени, например через 1 мин, рассчитать промежуточные значения скоростей и по ним построить график ,V(t). После этого, используя оба графика s(t) и V(t), легко яостроить линейный график торможения для включения в судовую информацию.
Построение линейного графика по данным траекторных измерений (см. рис. 5.3) для маневра СХП—ПХЗ показано на рис. 5.4.
Расчетное и экспериментально-расчетное определение элементов поворотливости
В теории корабля существуют аналитические методы количественного расчета элементов поворотливости, однако точность результатов таких расчетов обычно невысока. Это объясняется сложным и еще недостаточно изученным характером совместного влияния многочисленных факторов на поведение судна при выполнении поворотов, что заставляет обращаться к натурному эксперименту.
К настоящему времени в нашей стране и за рубежом накоплен значительный объем экспериментальных данных по поворотливости различных судов, в том числе в виде траекторий, полученных при выполнении циркуляций с различными углами перекладки руля.
На основе обработки таких экспериментов в разное время и разными авторами предложены эмпирические формулы для приближенного определения основных элементов циркуляции.
Из таких формул в качестве примера можно привести предложенные по результатам натурных испытаний одновинтовых судов разных серий (49 циркуляций на 11 судах), выполненных при различных углах перекладки руля. Из большого числа факторов путем регрессной*
ного анализа были отобраны лишь наиболее значимые, что позволило получить сравнительно простые расчетные формулы.
V
5Р
-{- А,р![]()
(5.10)
L
где Ж ~~ отношение длины между перпендикулярами к ширине;
Он —- коэффициент полноты площади погруженной части ДП, рассчитываемой по формуле (2.5);
ХР — относительное удлинение руля, рассчитываемое по формуле (2.6);
5Р—относительная площадь руля, выраженная в процентах к площади погружен-
![]()
В качестве второго фактора выбран угол дифферента судна i|>0, выраженный в градусах,
(5.11)йм-
57,3°,
где dH и dK — осадка носом и кормой (при дифференте на нос угол отрицателен).
С использованием указанных двух факторов получены структурно подобные эмпирические формулы для элементов циркуляции (см. п. 2.2), выраженных для сопоставимости в длинах судна. Эти формулы приведены ниже с указанными в скобках значениями стандартных относительных погрешностей (%):
Ф
(5.12)
'о
/t
—
5,84 0,68ф° —2,15,
(±
15,5);
У6°
Ф
Ф![]()
![]()
(5.14)
(5.15)
где 6° — угол перекладки руля.
Пользуясь фактором корпуса и руля Ф, можно также определить приближенно относительную скорость судна Руст (по отношению к начальной скорости) на установившейся циркуляции?
А
(5.16)
Используя полученные по формулам (5.12) — (5.15) значения вы- двига 1\ прямого смещения h, тактического диаметра DT и диаметра установившейся циркуляции 5уСт, можно приближенно построить траекторию циркуляции одновинтового судна для заданных значений дифферента и угла перекладки руля.
По приведенным формулам рассчитаны элементы циркуляции с рулем, переложенных право на борт для теплохода «Большевик
М. Томас», и построена траектория, показанная на рис. 5.5 (условно принималось, что после поворота на 90° циркуляция переходит в установившуюся).
Рис.
5.5. Траектория циркуляции с рулем на
борту теплохода «Больше»)» М. Томас»,
построенная расчетным способом
V/.5
г.
(5.17)
В приведенных выражениях в числителях стоят экспериментальные, а в знаменателях расчетные значения элементов циркуляции.
Если из экспериментов обнаружилась существенная несимметричность правых и левых циркуляций, то переходные коэффициенты еле* дует рассчитать отдельно для правых и левых поворотов.
Пользуясь полученными переходными коэффициентами, можно приближенно определить экспериментально-расчетные значения элементов циркуляции для любой заданной посадки судна, если расчетные значения элементов для этой посадки умножить на соответствующие переходные коэффициенты, ранее полученные по формулам (5.17).
Полученные таким путем экспериментально-расчетные значения элементов циркуляции существенно точнее расчетных, а построенные по ним траектории сохраняют все особенности, присущие данному судну.
Расчетное определение элементов торможения
Для практического расчета ИТХ по приведенным в гл. 3 формулам необходимо определить коэффициент сопротивления корпуса и силу упора винта для данного судна.
Расчет коэффициента сопротивления корпуса. На основе регрес- . минного анализа результатов натурных наблюдений пассивного торможения на 18 одновинтовых морских судах разного типа было полупи подвыражение для коэффициента k (кг/м):
fc —5880-}-0,654Si -у, (5.18)
I•* - площадь смоченной поверхности, м2;
В
- отношение ширины судна к средней осадке.
Данная эмпирическая формула по статистической оценке позволяет определять коэффициенты сопротивления корпуса для одновиито- вых судов, а следовательно, и путь пассивного торможения со стан- 1артной относительной погрешностью около 9,4 %.
Площадь смоченной поверхности Й с достаточной для практических целей точностью рассчитывается по эмпирической формуле:
f
0,492-
(5,19)
и \ - нодоп*мсицение-судна, т.
Расчет максимальной силы упора винта на заднем ходу. Сила упо- ии вши а Ли**, которую развивает винт к моменту остановки судна
I liocnre.ibiio воды, т. е. когда скорость судна равна нулю, является нлой упора винта при нулевой поступи. Для изолированного винта, i е без учета взаимодействия с корпусом, сила упора при V=0 (ре- *им «на швартовах») с учетом (3.6) рассчитывается по формуле:
яш«-= */*>"* (6.20)
| и сила упора винга, работающего задним ходом н швартовном режиме с ча
стотой л, Н;
А,, - коэффициент упора винта на заднем ходу в швартовном режиме.
Коэффициент упора kp может быть выбран из специальных дна >рамм для расчета реверсирования винтов либо с достаточной для НФШ точностью рассчитывается по эмпирической формуле:
(н н \
225 мп*—— i 0,098 sin —— ], (5.21)
//
I че — отношение шага кинти к его диаметру (шаговое отношение);
• н
дисконое отношение;
г число лопастей.
Нели гребной винт имеет направляющую насадку, то полученный по формуле (5.21) коэффициент kp следует уменьшись на 15%, т. е. \ множить на 0,85.
В реальных условиях на величину полезной силы упора при тор* можении оказывает влияние взаимодействие винта с корпусом судна. Как показал регрессионный анализ натурных наблюдений активного юрможении (25 экспериментов) на одновинтовых судах, чем больше площадь погруженной части мидель-шпангоута по сравнению с площадью диска винта, тем большую полезную силу упора развивает пинт при торможении.
Влияние корпуса учитывается коэффициентом усиления упора Суу, для расчета которого используется эмпирическая формула, полученная в результате регрессионного анализа,
St
Суу ~ 0,508-1-0,106 ——, (5.22)
Ad
где Sr£ — площадь погруженной части мидель-шпангоута = рЗ'— коэффи
циент полноты площади мидель-шпангоута), м2;
/ nD\ \
Ad — площадь диска винта I Алв —1. м2.
Максимальная сила упора винта Ртах рассчитывается по формуле:
^шах^^шв ^уу- (5.23)
Точность определения коэффициента Суу по формуле (5.22) характеризуется стандартной относительной погрешностью, равной 12,3 %. Следовательно, с такой же точностью определяется и Ртах по формуле (5.23).
Расчет коэффициента активности торможения. По найденным значениям Ртах и k можно рассчитать коэффициент активности торможения:
о = , (5.24)
к (0,514V„)* ’ V V
где VH — начальная скорость третьего периода, уз.
Расчетное определение времени и пути торможения судна. Как известно (см. п. 3.3), процесс торможения состоит из трех периодов.
В первом периоде (период прохождения команды) скорость судна остается равной исходной скорости Vo. Достаточно задаться продолжительностью первого периода tl, чтобы определить путь sl (величину tl рекомендуется принимать равной 5 с).
Время и путь второго и третьего периодов определяются по формулам (3.32—3.38) в соответствии с рекомендациями, изложенными в пп. 3.1 и 3.3.
Полное время и полный путь торможения определяются как сумма соответствующих значений по трем периодам, т. е. по формулам (3.16).
Стандартная относительная погрешность расчетного пути второго периода т1К™ равна погрешности расчета коэффициента сопротивления, т. е., как было показано выше, составляет 9,4 %. Погрешность расчетного пути третьего периода зависит как от погрешности
коэффициента к, так и от погрешности расчетной силы упора, которая, как уже отмечалось, равна 12,3 %. С использованием этих значений путем дифференцирования формулы (3.36) для активного тормозного пути по k и Ртах и перехода к конечным приращениям получено, что тшотн = 8,0 % (для среднего значения а=1,6).
Точность расчета полного тормозного пути S зависит от соотношения между вторым s11 и третьим $ш участками тормозного пути. Стандартная ошибка полного тормозного пути М отн определяется по формуле (3.39).
При использовании характерного для большинства случаев тор- su
можения диапазона —g— в пределах 0,15—0,75 получено:
AfoTH = 6,4— 6,9%.
Статистическая оценка путем прямого сравнения расчетных тормозных путей с экспериментальными полученными из многочисленных натурных наблюдений подтверждает значение найденной стандартной погрешности.
Универсальная диаграмма торможения и ее использование. Вместо расчетов по формулам (3.32—3.38) инерционно-тормозные характеристики можно получить по универсальной диаграмме (УД), приведенной в прил. 4. УД построена по указанным формулам и позволяет определять время и путь как пассивного, так и активного торможения.
Диаграмма состоит из двух независимых частей — верхней и нижней, совмещенных на одном листе.
Нижняя часть служит для определения времени торможения или, вернее, вспомогательного произведения VJ, из которого затем определяют t путем деления произведения VHt на известную начальную скорость V„ (VH выражается в узлах, a t в секундах). В диаграмму входят с коэффициентом активности торможения а, после чего по заданному относительному снижению скорости V/VH и параметру Д/£ (А — водоизмещение в тоннах, к — коэффициент сопротивления в кг/м) находят вспомогательное произведение VJ.
Таким образом, нижняя часть диаграммы связывает функциональной зависимостью четыре величины
VJVa Мк VHt
и позволяет определить любую из этих величин, если известны три остальные.
Верхняя часть диаграммы связывает функциональной зависимостью четыре величины
а VfV „ Л/Л s
и предназначена для определения тормозного пути s (кб), но также позволяет определить и любую из этих четырех величин, если три остальные известны.
При использовании УД необходимо помнить, что при пассивном торможении коэффициент а всегда равен нулю.
Под скоростью VH подразумевается начальная скорость пассивного или активного торможения в зависимости от периода, для которого определяются элементы торможения.
Пример. Для контейнеровоза, характеристики которого даны в п. 5.2, рассчитать время и путь при торможении СХП—ПХЗ, если: на СХП V—13,5 уз; максимальная скорость, при которой возможен уверенный реверс, Ур«»~9,4 уз; на ПХЗ номинальная частота вращения винта na.x”«§3 об/мин.
По результатам расчета построить линейный график торможения для заданного маневра.
Решение. »
А. Определение коэффициента к и параметра Д/Л:
( 25 4 \
4,854 + 0,492 =5008 м* — по формуле (5.19);
Г 25,4
4 = 5880 4-0,654-5008 1/ —— = 11 337 кг/м— по формуле (5.18);
3) A/A=-Jj|p-=2,02*2,0.
В. Определение Р ШМ X '•
кр^у'0,669.4 (0,225 sin* 1,01b-j 0,098 sin 1,016)
=-0,341 —по формуле (5.21);
РШ|)—0,341-1020 — * 082 986W—по формуле (5.20);
25 4*9 15*0 98
Суу = 0,5084-0,106—-—=«0,362— по формуле (5.22);
*) ^max — I 082 986* 1,362 — I 475027// — по формуле (5.23).
В. Определение времени и пути торможения для маневра СХП— Г1ХЗ.
Расчет ИТХ с указанием способа получения всех величин приведен в табл. 5.2.
Л Построение линейного графика торможения.
По рассчитанным для всех скоростей значениям времени и пути (см. табл. 5.2) строятся обычные графики v(t) и s{t) в прямоугольных координатах, а по ним таким же способом, как было показано в п. 5.2 (см. рис. 5.4), строится линейный график торможения для заданного маневра.
Таблица
5.2.
Элементы торможения контейнеровоза
для маневра СХП—ПХЗ
Периоды
Величины,
размерность
Способ
получения
Маневр
СХП ПХЗ
1
IV
уз с
S,
Кб
По
условию
По
формуле s]
-:V0t
(с
учетом размерности)
13.5
5
0.2
С-
у*
По
условию
13,5
V'np.
уз
Выбрана
произвольно между
11,5
и
Урев
VBP/Kj'
Из
УД по Упр/
V'l1
и Д/А (а -0)
0,852
11
^пр»
С
56
Sop,
Кб
То
же
2,0
VX1.
0,696
f".
С
Из
УД по Vpen/Vj1
и Д/А (а=0)
141
s",
Кб
То
же
4,5
уз
1/111 1/
ун
~УР«*
9,4
о,
уз
По
формуле (5.24)
5,56
1U
Упр.
уз
0,5
У*11
4,7
с
Из
УД по о, ИПр/У'1,=0,5
и А/к
85
Ч»«
кб
То
же
!,9
с
Из
УД по о, К/К*1
*=0 и A/ft
133
МП1
Кб *0.0* ко
То
же
2,2
Полный
7\
с S,
кб
По
формуле (3.16) То же
279
6.9
Примечание.При расчете II и 111 периодом юрмижения
время и путь определены, помимо
конечных, дли промежуточных скоростейVnpс целью облегчения
построения графика.
Достоинством расчетного метода является возможность определения ИТХ с удовлетворительной в большинстве случаев точностью ^ез выполнения громоздких натурных экспериментов.
К недостаткам метода относится отсутствие контроля, в связи с чем для отдельных судов с нестандартными инерционно-тормозными свойствами расчетные значения ИТХ могут иметь погрешности, превышающие средние статистические оценки (6,4—6,9%), а также и то, что этот метод, разработанный применительно к одновинтовым судам, не может в настоящем виде обеспечить надежных результатов для судов многовинтовых.
Экспериментально-расчетное определение элементов торможения
Целесообразное сочетание экспериментального и расчетного методов определения ИТХ позволяет в значительной мере сохранить присущие этим методам достоинства и одновременно исключить их недостатки.
В разработке экспериментально-расчетных методов принимал участие ряд авторов, предложивших свои независимые варианты расчета ИТХ с привязкой к натурным экспериментам.
А. И. Цурбан предложил расчетно-экспериментальный метод определения элементов пассивного торможения с использованием рассчитанных им таблиц.
С. С. Кургузов предложил аппроксимировать силу суммарного сопротивления корпуса судна параболой в степени 1,5, а также на основе моделирования комплекса «корпус — винтдвигатель» построил графики для получения тормозных путей. Им же (в соавторстве с М. М. Лесковым) в качестве меры инерционности предложено исполь- ювать временную характеристику tv (время снижения скорости вдвое при остановке двигателя в зависимости от начальной скорости VH) для определения текущей скорости V по формуле:
У= — . (5.25)
I
четным путем (см. п. 5.4) определяются ИТХ, точность которых по сравнению с чисто расчетным определением существенно повышается за счет привязки к результатам экспериментов.
Выполнение двух натуральных экспериментов. Первый эксперимент (пассивное торможение) выполняется с установившейся скорости полного или полного маневренного переднего хода по команде «Стоп машина». После выполнения команды (тахометр показывает снижение оборотов) замечают по лагу и записывают начальную скорость пассивного торможения Vйп и одновременно пускают седундомер. Судно удерживается на постоянном курсе с помощью руля.
В процессе пассивного торможения на судах с двигателями внутреннего сгорания следует наблюдать за снижением частоты вращения винта при закрытом топливе, а когда частота вращения станет равной значению, при котором допускается по инструкции реверс двигателя, нужно заметить и записать значение скорости судна, которую в дальнейшем следует считать максимальной скоростью, допускающей реверсирование Урев.
После снижения скорости до какого-то произвольно выбранного значения V (снижение должно быть значительным, например вдвое) снова замечают скорость и останавливают секундомер, записывая значения V и /п.
Второй эксперимент (активное торможение) выполняется с установившейся скорости полного маневренного или среднего переднего хода. По машинному телеграфу отдается команда «Полный назад». В момент реверсирования двигателя (стрелка тахометра проходит через нуль) пускают секундомер и одновременно записывают начальную скорость активного торможения Vн • Руль ставят в положение «Прямо», затем замечают и записывают частоту вращения, устойчиво развиваемую винтом при работе на задний ход.
В момент остановки судна относительно воды останавливают секундомер и записывают его отсчет
Экспериментальная часть работы на этом заканчивается, и судно может следовать по назначению.
Таким образом, описанные натурные наблюдения fie требуют тра- екторпых измерений, что существенно упрощает экспериментальную часть работы.
Обработка экспериментов. Полученные из первого эксперимента значения VnH, V и t11 позволяют на основании формулы для времени пассивного торможения (3.35), разрешенной относительно ky рассчитать экспериментальное значение коэффициента
/ Ун _ Л Vnt \ У Г
Вместо приведенной формулы можно из нижней части УД по произведению VnHfn и отношению V/Vjt11 при а=0 определить экспериментальное значение параметра (Д/&)э, после чего определить Л»:
'
- <526)
(Д/*)э)
где А — водоизмещение судна во время эксперимента, т.
Измеренные при втором эксперименте значения V ^ и t с использованием V/V111 =0 и полученного из первого эксперимента /гэ позволяют по одной из формул (3.32—3.34) методом последовательных
приближений найти экспериментальное значение коэффициента активности торможения аэ, по которому затем на основании формулы (5.24) рассчитать экспериментальное значение максимальной силы упора винта,
![]()
(5.27)
где У”1 — начальная скорость третьего (активного) периода, уз.
Для выбора нужной формулы из (3.32) — (3.34), поскольку значение аэ еще неизвестно, следует сначала выполнить расчет времени торможения по формуле (3.33), полагая аэ=1. Затем, сравнив расчетное время *рУсч с полученным из эксперимента /*п, выбрать нужную
формулу по условию: если то аэ> 1, следовательно, нуж
но использовать формулу (3.34), а если <t *п, то аэ< 1— сле
дует применить формулу (3.32).
Можно также вместо расчетов по формулам воспользоваться универсальной диаграммой. Для этого нужно рассчитать вспомогательное произведение а затем, используя значение У/Уш=0 и
А/Лэ, полученное из первого эксперимента, по нижней части диаграммы определить искомое значение аэ, после чего по формуле (5.27) найти Рэщ«х. Значения k9 и Рэтах, полученные по результатам экспериментов, должны быть пересчитаны на другие заданные осадки судна, для которых нужно рассчитать ИТХ, а Рэтах — еще и на номинальную частоту вращения при работе полным назад (если частота во время эксперимента отличалась от номинала).
ко
(5.28)
(5.29)
в которых k и Ртах должны быть определены соответственно по формулам (5.18) и (5.20) — (5.23) для тех же значений осадки и частоты вращения винта, при которых были выполнены два натурных эксперимента.
Полученные переходные коэффициенты позволяют определить экс- периментально-расчетные значения коэффициента сопротивления £э.р и силы упора при торможении для любых заданных значений
осадки и частоты вращения винта по формулам:
![]() (5.30)
(5.30)
(5.31)
в которых k и Ртах — расчетные значения, полученные по формулам
и (5.20—5.23) для любых заданных значений осадки судна и частоты вращения винта при торможении.
Определение экспериментально-расчетным методом коэффициента сопротивления и силы упора для заданных условий показано на примере с использованием универсальной диаграммы (УД).
Пример. На теплоходе «Большевик М. Томас», имеющем осадку 4срж9,15 м, водоизмещение Л~22 850 т. выполнены два эксперимента — пассивное и активное торможение, из которых получено:
первый эксперимент: V'J,1 ** 16,0 уз; У*7,0 уЗ; /и=400 с; второй эксперимент: vj11 =9,4 уз; /q q «129 с; Лз.х—93 об/мин.
Требуется определить экспериментально-расчетные значения Лэ р и для
судна в полном грузу: dcр—9,8 м; Д«25000 т; л3.х=90 об/мин (характеристики корпуса и гребного винта даны в п. 5.2).
Решение.
Обработка натурных экспериментов.
1. Первый эксперимент:
1) V/yJ1 = =0,438; V^1 / '1 = 16,0-400 = 6400 уэс, а=0;
А 22 850
2) из УД (A/fc)s«2,3, откуда кэ — —— = -——=== 9935 кг/м;
(Л/й)э 2,3
3) Й =Д2/3 ^4,854 -I- 0,492-у) = 22 850*/3 ^4,854 + 0,492-2^-j = 5008 м*;
4) *---5 880 + 0,654U —■ =5880 + 0,654 =11 337 кг/м;
*„ 9 935
5>v*=-f=
Второй эксперимент:
I) -9.4.129» 1213; У/У"1 =-«, <Д/Лг)а— 1.3;
2) из УД— а. я» 7,5, откуда /*,*=--«» к.л (0.514^м )* - ~7.5-9935 (0,514.9.4)» = 1 742 454 Н;
3)
к,,
—У0г( 0,225sin*
— 0,098
sin
^
\ ^11 ‘ /
--- уО,бб9-4 (0.225 sin* 1,0164-0,098 sin 1,016)^0,341;
4) Pm*” *Р Р (-jjj-y D* = 0,341 • 1020 6,0« = 1 082 986 H:
5 | 95 4.9 15-0 98
Ъ)
Cyy
-0,508 I-0,106-j— «=.-0,5084
0,106—^'^оГ/4
’
/"max * Cyy Ршн = 1,362-1 082 986 ^ 1 475 027 H;
/»„ 1742453
7)V,’^'^7 1475027 " ' '
Определение экспериментально-расчетных значений коэффициента сопротивления и силы упора для судна в полном грузу.
1) И-= 25000214,854 0,492 ) =5240 м*;
/ 25,4
к 5880 ; 0,<»54*5 240 |/ -11 397 кг/м;
—Yk Л —0,876* 11 397 -9 984 кг/м;
25 0(Х)
(Д/^.р-^-2.5;
5). /ши -0,341 • 1020(У 6,О4 - 1 014 243Н;
25,4*9,8*0,98
<i) СУ¥=0,508 ; 0,100 -—!— - 1,423;
' у> 1 я-6,02/4
Ртак -» 1,423-1 014 243-- 1 443 268 Н;
#> ^max^Yp^ir»ax-=iJ8l*l 443 268-1 704 500 Н.
Полученные экспериментально-расчетные значения коэффициента юпротивления и силы упора винта позволяют определить время и путь торможения при заданной осадке и частоте вращения для любой начальной скорости судна по такой же схеме, какая применялась для Расчетного метода в предыдущем примере (см. п. 5.4).
Точность экспериментально-расчетного метода. Точность определения тормозных путей экспериментально-расчетным методом в среднем на 1—2% выше, чем расчетным, благодаря привязке к экспериментальным данным с помощью переходных коэффициентов. Стандартная относительная погрешность экспериментально-расчетного определения полных тормозных путей по статистическим оценкам составляет около 5—6 %. Таким образом, выигрыш в точности не очень велик, тем не менее применение экспериментально-расчетного метода существенно повышает надежность результатов, особенно для судов, обладающих необычными тормозными свойствами. В этих случаях выигрыш в точности гораздо выше.
Особо следует подчеркнуть, что экспериментально-расчетный ме- к)д применим для всех судов, включая многовинтовые, в то время как расчетный метод можно использовать только для определения ИТХ одновинтовых судов.
Контрольные вопросы. 1. Каковы требования ИМО к форме и содержанию судовой информации о маневренных характеристиках? 2. Каковы достоинства и недостатки различных способов определения маневренных элементов из натурных наблюдений? :t. Каковы принципы и порядок определения элементов поворотливости расчетно-экспериментальным методом? 4. Каковы обоснования определения коэффициента сопротивления расчетно-экспериментальным методом? 5. Каковы обоснования определения максимальной силы упора винта при торможении расчетно-экспериментальным метолом? в. Что представляют собой переходные коэффициенты и какова их роль в расчетно-экспериментальных методах определения маневренных характеристик судов?