

Загальні відомості про сау
Системи автоматичного управління (САУ) призначені для керування технічними процесами без безпосереднього втручання або участі людини.
У складі САУ розрізняють власне об'єкт керування й керуючі пристрої. Дуже часто цей розподіл частково або повністю умовно і в основному базується на зручності аналізу системи, а не на фізичному поділі об'єкта й пристрою керування. Об'єкт і керуючий пристрій зв'язані через виконавчі механізми, за допомогою яких на об'єкт передаються керуючі впливи, і через вимірювальну апаратуру, від якої керуючі пристрої одержують сигнали про стан об'єкта. Технічно в САУ входить також апаратура і лінії зв'язку між вище зазначеними елементами, і їхнім можливим впливом на сигнали в системі не можна нехтувати.
При побудові та аналізу САУ приділяється значна увага саме інформаційним потокам та зв'язкам, а також тим перетворенням (і спотворенням) сигналів, які відбуваються в об'єкті, в керуючому пристрої, в зв'язковій апаратурі. Сукупність правил і процедур, по яких керуючий пристрій обробляє інформацію для вироблення керуючих впливів, називається алгоритмом функціонування САУ.
Основні принципи побудови сау
З погляду спрямованості інформаційних потоків можливі два основних принципи побудови САУ: з розімкнутим та із замкнутим ланцюгом впливу.
У САУ з розімкнутим ланцюгом впливу (скорочено — «розімкнуті САУ», рис. 1) потік інформації спрямований тільки від керуючого пристрою до об'єкта керування, тобто вироблювані в системі керуючі впливи не залежать від стану об'єкта. Типові приклади такого керування —копіювальні верстати, пральні машини, установки для нарізки і свердління друкованих плат в електроніці, трикотажні машини — автомати, САУ виведенням балістичних ракет на навколоземні орбіту, верстати із програмним керуванням.

Рис. 1 (розімкнута система програмного керування)
Крім розімкнутих САУ в промисловості широко поширені розімкнуті системи автоматичного контролю або інформаційно-вимірювальні системи (ІВС, рис. 2).Ці системи не управляють об'єктами, але часто виконують функції автоматичного маркування, сортування або відбраковування виробів.
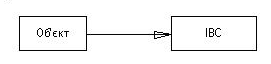
Рис. 2 (розімкнута інформаційна система)
У
САУ із
замкнутим ланцюгом впливу («замкнуті
САУ», рис. 3)
є сигнали зворотного зв'язку, що надходять
від об'єкта керування в керуючий пристрій.
Сигнали зворотного зв'язку обробляються
керуючим пристроєм по певних алгоритмах
відповідно до поточних і прогнозованих
змін стану об'єкта керування. У результаті
на виході керуючого пристрою формуються
керуючі впливи на об'єкт. У системі
керування утвориться замкнута петля
зворотного зв'язку. Сигнали, передані
між блоками й ланками САУ, часто називають
фазовими координатами або просто
координатами САУ.
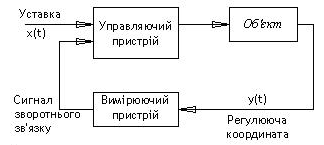
Рис. 3 (замкнута система (зі зворотним зв'язком))
Найважливішою перевагою САУ зі зворотним зв'язком є їх здатність компенсувати різного роду збурювання й перешкоди, що неминуче виникають у процесі роботи будь-якого об'єкта керування. У найпростішому випадку завданням замкненої САУ є підтримка деякої координати в заданих межах. У цьому випадку поточне значення стабілізуючої координати (виходу об'єкта) порівнюється з необхідним значенням, що називається «уставкой» (Вх.). Керуючий пристрій впливає на об'єкт таким чином, щоб різниця виходу і «уставки» була мінімальна (бажано нульовою). Такі системи називають системами автоматичного регулювання (САР) або просто автоматичними регуляторами. Приклад такої системи — звичайний домашній холодильник. В якому термореле спрацьовує, коли температура в холодильній камері стає вище допустимої, і увімкне двигун компресора, що діє доти, поки термореле не «виявить», що температура знизилася досить, і не відключить живлення двигуна. Якщо «уставка» не є постійної, а змінюється за заданим законом для того, щоб і вихід системи змінювався за цим законом, то така САР називається системою, що стежить (слідкуючою).
Розімкнені САУ і ІВС можна розглядати, як окремі випадки замкнутої САУ, у якій один зі зв'язків обірвано. До розімкнутих САУ відносять і системи з керуванням по збурюванню ( рис. 4), іноді їх називають системами компенсаційного типу. У таких системах керуючий вплив виробляється, як функція діючого на систему збурювання.
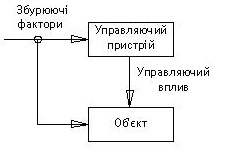
Рис. 4 (розімкнута система з керуванням по збурюванню)
Припустимо, що потрібно підтримувати вихідну координату системи на постійному рівні і відомо, який саме фактор і яким чином впливає на вихід системи. Тоді можна, вимірюючи збурювання цього фактора, задавати керуючий вплив так, щоб компенсувати ці збурювання.
Розглянемо простий приклад: здійснюється автоматичне електрозварювання металевих листів, рівномірно подаваних у зварювальний апарат. Щоб зварений шов був міцним, швидкість подачі зварювального електрода й температура зварювання повинні перебувати в певних межах. Однак товщина листів, що зварюють, може змінюватися, а тому повинні змінюватися і швидкість подачі електрода, і сила струму у зварювальному апараті. У цьому випадку цілком доцільний варіант керування полягає в тому, щоб вимірювати заздалегідь товщину аркушів і, залежно від неї, змінювати швидкість подачі електрода і величину струм. Інша можливість складається в зміні швидкості подачі аркушів залежно від їхньої товщини. В обох випадках зворотний зв'язок у системі відсутній, а керування здійснюється, як функція збурювання.
Важлива перевага систем з керуванням по збурюванню полягає в тому, що компенсація збурювання виникає одночасно із самим збурюванням. Більше того, керуючий пристрій може при необхідності заздалегідь «вжити заходів», щоб збурювання не вплинуло небажаним чином на об'єкти керування або на технологічний процес. Таке керування із прогнозом у багатьох випадках просто необхідне.
Головний недолік систем керування по збурюванню це відсутність в універсальності. У таких системах немає проблеми стійкості, але гостро стоїть проблема точності. Необхідно заздалегідь знати всі можливі фактори, що обурюють, і мати точні способи їхньої компенсації, що, як правило, неможливо або занадто складно. Тому дуже часто застосовують системи комбінованого керування, що включає в себе керування по збурюванню разом з керуванням зі зворотним зв'язком (рис. 5).
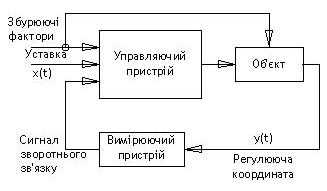
Рис. 5 (комбінована (змішана) система з керуванням по збурюванню і по зворотному зв'язку)
В тих випадках, коли керування процесом здійснюється за допомогою спеціальних пристроїв, але при участі людини (оператора), говорять про автоматизовані системи керування. Звичайно до складу автоматизованих систем входять САУ більш низького рівня, що управляють окремими системами.
Висновок
Всі ці системи телемеханіки і АСУ, як правило, зв'язані між собою, утворюючи безліч контурів керування. Зокрема, пристрої, відповідальні за оптимізацію, задають рівні, на яких САР повинні стабілізувати параметри процесів. У процесі роботи об'єкта «установки» можуть також змінюватися відповідно до заданої програми або за бажанням оператора.
Список використаної літератури:
https://goo.su/vuQq7z
http://electricalschool.info/spravochnik/poleznoe/1507-sistemy-telemekhaniki-v-jenergetike.html
http://moodle.spsu.ru/pluginfile.php/59243/mod_resource/content/1/%D0%A1%D0%B8%D1%81%D1%82%D0%B5%D0%BC%D1%8B%20%D1%82%D0%B5%D0%BB%D0%B5%D0%BC%D0%B5%D1%85%D0%B0%D0%BD%D0%B8%D0%BA%D0%B8.pdf
http://electricalschool.info/spravochnik/poleznoe/1507-sistemy-telemekhaniki-v-jenergetike.html
https://studopedia.ru/17_19106_osnovnie-svedeniya-o-sistemah-telemehaniki.html