

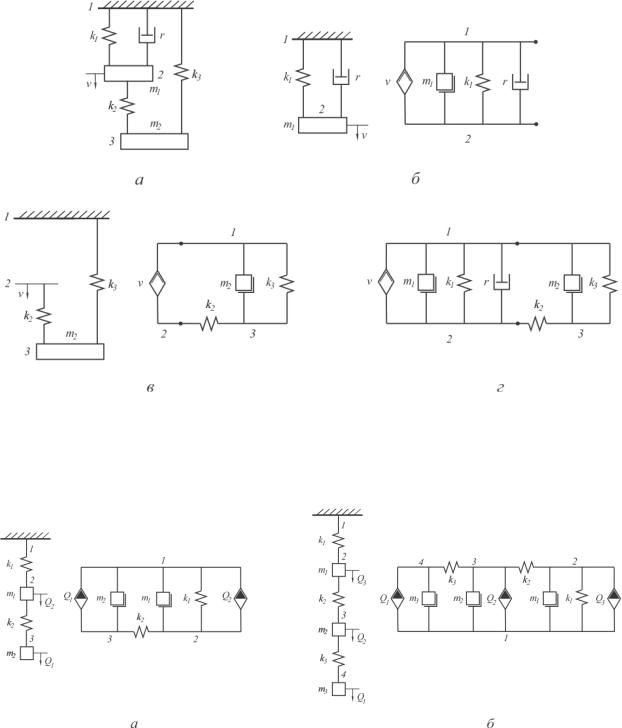
Рис. 1.4. Декомпозиция колебательной системы и построение ее механической цепи.
Рис. 1.5. Механические цепи с двумя источниками вибронагрузки
1.3. Расчет механических цепей
Расчет виброскоростей и вибронагрузок в полюсах механической цепи выполняется в два этапа. На первом этапе определяют комплексное сопротивление цепи, на втором ― рассчитывают значения переменных состояния в полюсах. На первом этапе последовательно определяют
10
комплексные сопротивления участков цепи, начиная с наиболее удаленного от источника. На рис. 1.6 для колебательной системы (а) построена механическая цепь (б), в которой комплексные сопротивления пассивных двухполюсников обозначены S1,..,S9 . Наиболее удаленные от источника
элементы S1,..,S3 образуют параллельное соединение (рис. 1.6, в), поэтому их полное комплексное сопротивление согласно (1.4) равно
S123 = S1 + S2 + S3 . |
(1.6) |
Двухполюсник с сопротивлением S123 соединен с двухполюсником S4
последовательно (рис. 1.6, г), поэтому их полное комплексное сопротивление согласно (1.5) равно
S |
= |
S123S4 |
. |
(1.7) |
|
||||
1..4 |
|
S123 + S4 |
|
|
|
|
|
||
Далее аналогичным образом выполняются действия, показанные на рис. 1.6, д‒ж, приводящие к выражениям
S1..6 = S1..4 + S56 , |
S56 = S5 + S6 , |
(1.8) |
||||||||
S |
= |
S1..6S78 |
, |
S |
78 |
= S |
7 |
+ S |
, |
(1.9) |
|
||||||||||
1..8 |
|
S1..6 + S78 |
|
|
8 |
|
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
S1..9 = S1..8 |
+ S9. |
|
|
|
(1.10) |
|||
Выполнение второго этапа начинается с расчета виброскорости в полюсе 4 (рис. 1.6, ж)
v1..9 =Q / S1..9. |
(1.11) |
||
Далее последовательно рассчитываются вибронагрузки в |
элементах |
||
S1..8 и S9 (рис. 1.6, е) |
|
|
|
Q1..8 = S1..8v1..9 , |
Q9 = S9v1..9 , |
(1.12) |
|
виброскорости в элементах S1..6 и S78 |
(рис. 1.6, д) |
|
|
v1..6 =Q1..8 / S1..6 , |
v78 =Q1..8 / S78 , |
(1.13) |
|
вибронагрузки в элементах S7 , S8 , S56 и S1..4 (рис. 1.6, г) |
|
||
Q7 = S7v78 , Q8 = S8v78 , |
Q56 |
= S56v1..6 , Q1..4 = S1..4v1..6 , |
(1.14) |
|
11 |
|
|
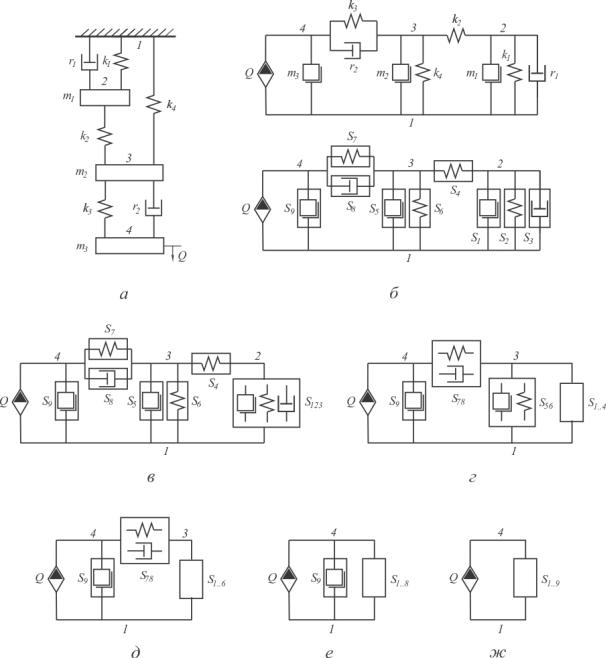
Рис. 1.6. Расчет механической цепи
виброскорости в элементах S5 , S6 , S4 и S123 (рис. 1.6, в)
v5 =Q56 / S5 , v6 =Q56 |
/ S6 , v4 =Q1..4 |
/ S4 , |
v123 =Q1..4 / S123 , |
(1.15) |
и, наконец, вибронагрузки в элементах S1 , S2 |
и S3 |
(рис. 1.6, б) |
|
|
Q1 = S1v123, |
Q2 = S2v123, |
Q3 = S3v123 . |
(1.16) |
|
|
12 |
|
|
|

Замкнутые выражения согласно формулам (1.6)‒(1.16) целесообразно выполнять в системе компьютерной алгебры, принимая во внимание, что
S =im ω, |
S |
2 |
= −ik1 |
, S |
3 |
= r , |
|
S |
4 |
= − |
ik2 |
, S |
5 |
=im ω, |
|
||||||||
|
|
|
|||||||||||||||||||||
1 |
1 |
|
|
ω |
|
|
|
|
1 |
|
|
|
ω |
|
2 |
(1.17) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
= −ik4 , S |
|
|
ik3 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
S |
6 |
7 |
= − |
, |
S |
8 |
= r , |
S |
9 |
=im ω. |
|
|||||||||||
|
|
|
|||||||||||||||||||||
|
|
|
ω |
|
|
|
ω |
|
|
|
2 |
|
|
3 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
По данному выше образцу могут быть рассчитаны другие линейные схемы.
Если в механической цепи находится несколько источников вибровозбуждения, необходимо принимать во внимание, что полные комплексные сопротивления определяются по отношению к каждому источнику. Рассмотрим простейший случай (рис. 1.7), к которому сводятся механические цепи, приведенные на рис. 1.5. Будем полагать, что источники вибровозбуждения имеют бесконечное комплексное сопротивление и одинаковую частоту и фазу.
Рис. 1.7. Расчет механической цепи с двумя источниками
Рассчитываются комплексные сопротивления относительно источника вибронагрузки Q′:
S |
23 |
= |
S2S3 |
, |
S |
= S + S |
23 |
. |
(1.18) |
|
|
||||||||||
|
|
S2 |
+ S3 |
|
123 |
1 |
|
|
||
|
|
|
|
|
|
|
|
|
||
Далее последовательно определяются виброскорости и вибронагрузки в элементах, возбуждаемые этим источником:
|
v123 =Q / S123, |
(1.19) |
||
|
′ |
′ |
|
|
Q1 |
= S1v123, |
Q23 |
= S23v123, |
(1.20) |
′ |
′ |
′ |
′ |
|
13
v2 |
=Q23 / S2 , |
v3 |
=Q23 / S3 . |
(1.21) |
′ |
′ |
′ |
′ |
|
Независимо рассчитываются комплексные сопротивления относительно источника вибронагрузки Q′′
S = |
S1S2 |
, |
S |
312 |
= S |
3 |
+ S , |
(1.22) |
|
|
|||||||||
12 |
S1 |
+ S2 |
|
|
|
12 |
|
||
|
|
|
|
|
|
|
|
||
а также виброскорости и вибронагрузки в элементах, возбуждаемые этим источником
|
v312 =Q / S312 , |
(1.23) |
||
|
′′ |
′′ |
|
|
Q3 |
= S3v312 , |
Q12 |
= S12v312 , |
(1.24) |
′′ |
′′ |
′′ |
′′ |
|
v1 =Q12 / S1, |
v2 |
=Q12 / S2 . |
(1.25) |
|
′′ |
′′ |
′′ |
′′ |
|
Далее находятся суммарные значения виброскоростей и вибронагрузок в элементах
|
′ |
′′ |
′ |
′′ |
, |
|
′ |
|
′′ |
|
|
v1 = v1 |
+ v1 |
, |
v2 = v2 |
+ v2 |
|
v3 = v3 |
+ v3, |
(1.26) |
|||
′ |
|
′′ |
|
′ |
|
′′ |
|
′ |
′′ |
||
Q1 =Q1 |
+Q1, |
|
Q2 =Q2 |
+Q2 |
, |
Q3 =Q3 |
+Q3. |
|
|||
В общем случае необходимо соблюдать «полярность» подключения источников (то есть сдвиг на π относительно неподвижной системы координат). Если изменить механическую цепь на рис. 1.7 так, чтобы источники работали в противофазе, в выражениях (1.26) следует изменить знак одного из слагаемых на противоположный.
Изложенный метод расчета не применим к механическим цепям с перекрещивающимися связями (рис. 1.2, и), соответствующим колебательным системам, содержащих три связанных попарно инерционных элемента. Соответствующий участок цепи в виде треугольника (рис. 1.8, б) преобразуется в эквивалентную схему в виде звезды (рис. 1.8, а). Для того, чтобы найти связь комплексных сопротивлений эквивалентных цепей в виде звезды и треугольника, приложим к полюсам произвольную сбалансированную систему вибронагрузок:
Q1 +Q2 +Q3 = 0 . |
(1.27) |
14

Рис. 1.8. Механические цепи в виде звезды (а) и треугольника (б)
Каждая из них связана с относительной виброскоростью:
Q1 = S1(v1 −v0 ), |
Q2 = S2 (v2 −v0 ), |
Q3 = S3 (v3 −v0 ). |
(1.28) |
|
Из (1.27), (1.28) следует выражение |
|
|
||
v |
= |
S1v1 + S2v2 + S3v3 |
, |
|
|
|
|||
0 |
|
S1 + S2 + S3 |
|
|
|
|
|
|
|
подставляя которое в (1.28), можно получить
Q = |
|
S1(S2 + S3 ) |
|
v − |
|
|
|
S1S2 |
|
|
|
v − |
|
|
S1S3 |
|
|
|
v , |
|
|||||||||||||||||
|
|
|
S |
|
|
|
|
S |
|
|
|
|
|||||||||||||||||||||||||
1 |
|
S |
+ S |
2 |
+ S |
|
1 |
|
|
+ S |
2 |
+ S |
|
|
2 |
|
+ S |
2 |
+ S |
|
3 |
|
|||||||||||||||
|
1 |
|
|
3 |
|
|
|
|
1 |
|
|
3 |
|
|
|
|
1 |
|
|
3 |
|
|
|
||||||||||||||
Q = |
|
S2 (S1 + S3 ) |
|
v |
− |
|
|
S2S1 |
|
|
|
|
|
v |
− |
|
|
S2S3 |
|
|
|
v , , |
(1.29) |
||||||||||||||
|
|
|
|
S |
|
|
|
|
|
|
|
S |
|
|
|
|
|||||||||||||||||||||
2 |
|
S |
+ S |
2 |
+ S |
|
2 |
|
|
+ S |
2 |
+ S |
1 |
|
+ S |
2 |
+ S |
3 |
|
||||||||||||||||||
|
1 |
|
|
|
|
3 |
|
|
|
1 |
|
|
|
|
|
|
3 |
|
|
|
1 |
|
|
|
|
3 |
|
|
|
||||||||
Q = |
|
S3 (S1 + S2 ) |
|
v |
− |
|
|
S1S3 |
|
|
|
|
|
v |
− |
|
|
S2S3 |
|
|
|
v . |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
3 |
|
S + S |
2 |
+ S |
|
3 |
|
|
S + S |
2 |
+ S |
|
1 |
|
S + S |
2 |
+ S |
|
2 |
|
|||||||||||||||||
|
1 |
|
|
|
|
3 |
|
|
|
1 |
|
|
|
|
3 |
|
|
|
1 |
|
|
3 |
|
|
|
||||||||||||
Для соединения треугольником баланс вибронагрузок в каждом полюсе требует
Q1 +Q13 −Q21 = 0, Q2 +Q21 −Q32 = 0, Q3 +Q32 −Q13 = 0. |
(1.30) |
Записывая связи вибронагрузок в плечах треугольника с относительными виброскоростями
Q21 = S21(v1 −v2 ), Q13 = S13 (v3 −v1), Q32 = S32 (v2 −v3 ) , |
(1.31) |
15 |
|
получаем выражения переменных состояния в полюсах через комплексные сопротивления треугольника
Q1 = (S12 + S13 )v1 − S21v2 − S13v3, |
|
Q2 = (S32 + S21)v2 − S21v1 − S32v3, , |
(1.32) |
Q3 = (S13 + S32 )v3 − S13v1 − S32v2.
Из выражений (1.29) и (1.32) следует
S21 |
= |
|
S1S2 |
, |
S32 |
= |
|
S2S3 |
, S13 |
= |
|
S1S3 |
. |
(1.33) |
|
S1 |
+ S2 + S3 |
S1 |
+ S2 + S3 |
S1 |
+ S2 + S3 |
||||||||||
|
|
|
|
|
|
|
|
|
Обратные выражения
S = |
|
S21S13 + S21S32 + S32S13 |
, |
|
|||
|
|
|
|||||
1 |
|
|
S32 |
|
|||
|
|
|
|
||||
S2 |
= |
|
S21S13 + S21S32 + S32S13 |
, |
(1.34) |
||
|
|
|
S13 |
|
|
||
S3 |
= |
|
S21S13 + S21S32 + S32S13 |
|
|
||
|
S21 |
|
|||||
|
|
|
|
||||
получаются путем деления каждой пары равенств (1.33) друг на друга
S = |
S21 |
S |
, |
S |
2 |
= |
S32 |
S , |
S |
3 |
= |
S13 |
S |
(1.35) |
|
|
|
||||||||||||
1 |
3 |
|
|
|
S13 |
1 |
|
|
1 |
|
||||
|
S32 |
|
|
|
|
|
|
|
|
S21 |
|
|||
и исключения с помощью (1.35) ненужных переменных из (1.33).
16