

книги / Элементы и структуры систем автоматизации технологических процессов нефтяной и газовой промышленности
..pdfмые дроссели, переменные сопротивления, переменные емкости, контакторы и другие устройства, меняющие параметры объектов управления.
4.4.1. Исполнительные двигатели вращения
По виду используемой энергии исполнительные двигатели вращения делятся на электрические, гидравлические и пневматические.
Электрические исполнительные двигатели вращения
Электрические исполнительные двигатели вращения бывают двух типов: постоянного и переменного тока.
Исполнительные двигатели вращения постоянного тока.
В качестве двигателей постоянного тока в системах автоматики используют двигатели с независимым возбуждением и регулированием тока якорной цепи.
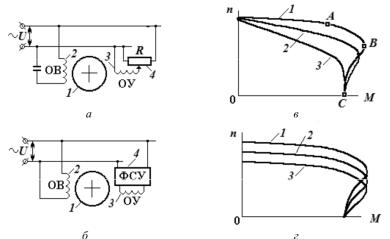
Статорная обмотка возбуждения ОВ (рис. 45,а) такого двигателя подключена к независимому источнику постоянного напряжения. На щетки вращающегося якоря постоянное напряжение подается через последовательно включенный потенциометр R (переменное сопротивление).
Нагрузочная характеристика (изменение числа оборотов якоря n в зависимости от момента M сопротивления на валу) этого двигателя (рис. 45,б) всегда линейна. Уровень этой характеристики зависит от тока якоря Iя, который регулируется величиной переменного сопротивления R.
Рис. 45. Схема подключения (а) и нагрузочная характеристика (б) исполнительного двигателя постоянного тока
71
Исполнительные двигатели постоянного тока просты в управлении, но дороги в обслуживании и требуют специальных источников постоянного тока.
Исполнительные двигатели вращения переменного тока.
В системах автоматики используют двухфазные двигатели переменного тока с различными способами управления. Асинхронный исполнительный двигатель состоит из короткозамкнутого ротора 1 с обмоткой, выполненной в форме беличьей клетки, и двух статорных обмоток 2 и 3 со взаимно перпендикулярными магнитными осями. Обмотка возбуждения (ОВ) 2 подключается к источнику переменного напряжения через конденсатор, а на обмотку управления (ОУ) 3 напряжение от этого источника подается через потенциометр R (4 на рис. 46,а).
Обе обмотки совместно создают вращающийся магнитный поток статора двумя способами. По одному из способов вращающийся магнитный поток статора создается за счет подключения фазосдвигающей емкости в обмотку возбуждения (см. рис. 46,а), а по другому способу этот поток создается за счет подключения в обмотку управления фазосдвигающего устройства (ФСУ) (4 на рис. 46,б).
Рис. 46. Схемы подключения (а,б) и характеристики (в,г) асинхронного исполнительного двигателя переменного тока
72
В первом случае конденсатор смещает во времени процесс нарастания напряжения в обмотке возбуждения, поэтому магнитные потоки в ОВ и ОУ смещены по фазе на 90о (по времени нарастания). Это позволяет создавать вращающийся с постоянной скоростью магнитный поток. Регулирование момента двигателя осуществляется в этом случае изменением амплитудного значения тока в обмотке управления, которое выполняется потенциометром R.
Во втором случае смещение во времени процесса нарастания напряжения в обмотке управления выполняется ФСУ, с помощью которого можно плавно менять угол сдвига по фазе процесса нарастания тока в ОВ и ОУ, следовательно, и плавно менять скорость вращения ротора двигателя.
Вращающийся магнитный поток статора двигателя сцепляется с короткозамкнутой обмоткой его ротора, в которой наводится вихревой ток. Этот ток наводит вторичный магнитный поток ротора. Магнитные потоки ротора и статора, сцепляясь, увлекают друг друга, создавая вращающий момент на роторе двигателя.
Нагрузочная характеристика асинхронного двигателя с постоянной скоростью вращения магнитного потока показана на рис. 46,в. Согласно этой характеристике увеличение момента сопротивления М на роторе двигателя от нуля до точки А приводит к незначительному снижению частоты вращения ротора. Такое снижение частоты вращения ротора под действием нагрузки называют скольжением. Если величина момента сопротивления на роторе продолжает возрастать, происходит резкое нелинейное снижение частоты вращения ротора до точки В. Дальнейшее незначительное увеличение момента на роторе двигателя приводит к «опрокидыванию» двигателя, которое проявляется в резком нелинейном снижении до нуля скорости вращения ротора и сопровождается падением вращающего моментадоточки С.
При изменении тока в обмотке управления с помощью потенциометра R (переменного сопротивления) меняется характер наклона нагрузочной характеристики. Чем больше величина этого
73
сопротивления, тем круче наклон этой характеристики (см. кривые 1,2,3 на рис. 46,в). Это свойство асинхронного двигателя позволяет регулировать скорость его вращения путем изменения тока в обмоткеуправления регулируемым сопротивлением R.
Нагрузочная характеристика асинхронного двигателя с фазосдвигающим устройством показана на рис. 46,г. От предыдущей она отличается тем, что с увеличением параметра сдвига по фазе нарастания тока в обмотке управления характер нагрузочной кривой по углу наклона не меняется. В этом случае с изменением параметра сдвига по фазе снижается скорость вращения ротора (кривые 2 и3). Этот способ управления асинхронным двигателем позволяет более эффективно менять частоту вращения его ротора, но он более сложен по конструктивному исполнению.
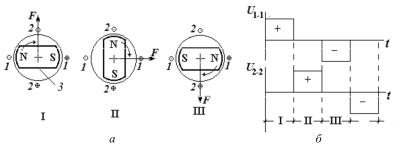
Шаговые исполнительные двигатели. Шаговые двигатели переменного тока (рис. 47,а) предназначены для дискретного пошагового перемещения (вращения) объекта управления.
Рис. 47. Схема шагового исполнительного двигателя (а) и характеристика его входного сигнала (б)
Шаговый двигатель состоит из многополюсной статорной обмотки (в данном случае 1 ─ 1 и 2 ─ 2) и вращающегося ротора 3, выполненного в форме постоянного магнита с полюсами N и S. Прямоугольные знакопеременные импульсы напряжения (рис. 47,б) специальным распределительным устройством последовательно (по тактам I, II, III и т.д.) подаются на полюсные обмотки 1 ─ 1 и 2 ─ 2.
74
Если на обмотку 1 ─ 1 подается импульс положительной полярности, то в плоскости этой обмотки создается магнитный поток направления F, с которым взаимодействует магнитное поле постоянного магнита ротора. В результате этого взаимодействия ротор поворачивается на 90º. В следующий такт управления распределитель подает импульс положительной полярности на обмотку 2 ─ 2. В результате этого магнитный поток статора поворачивается еще на 90º, увлекая за собой ротор двигателя. Для сохранения вращательного движения ротора следующий импульс отрицательной полярности подается на обмотку 1 ─ 1, а затем на обмотку 2 ─ 2.
Угол φ единичного поворота ротора при каждом управляющем импульсе зависит от числа полюсных обмоток (если таких обмоток три, то угловой шаг поворота будет равен 60º). В общем случае угловой шаг поворота ротора будет определяться формулой
φ = 180 / n, |
(19) |
где n − число пар полюсов статорной обмотки.
Применение шагового исполнительного двигателя позволяет непосредственно и точно управлять перемещением объектов с помощью дискретных цифровых импульсных сигналов. Это качество шагового двигателя особенно ценно в цифровых системах управления.
Гидравлические исполнительные двигатели вращения
Гидравлические исполнительные двигатели, как и сельсины, работают всегда в паре. Такая пара называется гидромашинной парой. Одна из этих гидромашин называется гидронасосом, а другая − гидромотором. По принципу работы гидромашины делятся на лопастные и аксиально-поршневые.
Исполнительные гидромашины лопастного типа. Лопаст-
ные гидромашины обоих типов (насосы и моторы) устроены одинаково (рис. 48). Лопастная гидромашина состоит из статора
75
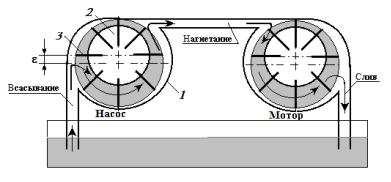
1, ротора 2 и радиально расположенных в роторе лопаток 3. Ось вращения ротора смещена на величину ε от оси внутренней расточки статора. В результате этого при вращении ротора межлопаточный объем постоянно изменяется.
В одной половине полости внутренней расточки статора (от 0 до 180о) при повороте ротора происходит увеличение межлопаточного объема. Она связана с всасывающим патрубком, по которому рабочая жидкость заполняет этот межлопаточный объем. Во второй половине полости внутренней расточки статора (от 180о до 360о) по мере вращения ротора межлопаточный объем уменьшается, что вызывает увеличение давления рабочей жидкости, которая в результате этого выталкивается в патрубок нагнетания.
Рис. 48. Схема устройства и принцип работы лопастных гидромашин
Количество нагнетаемой жидкости зависит от величины смещения осей вращения статора и ротора, т.е. от параметра ε. Для лопастных насосов этот параметр регулируемый, а для моторов постоянный и максимально возможный. Рабочая жидкость, поступающая по патрубку нагнетания в полость расширения гидромотора, оказывает давление на его рабочие лопатки, в результате чего на роторе создается вращающий момент. Полость сжатия рабочей жидкости в гидромоторе соединена с патрубком слива, через который эта жидкость подается в общий
76

сливной бак гидросистемы. Затем из этого бака жидкость через патрубок всасывания вновь нагнетается насосом в гидромотор. Этот процесс непрерывен до тех пор, пока работает гидронасос, приводимый в действие исполнительным двигателем.
Исполнительные гидромашины аксиально-поршневого ти-
па. Аксиально-поршневые гидромашины устроены одинаково (рис. 49). Гидронасос состоит из вращающегося блока цилиндров 1, в котором помещаются плунжеры 2, шарнирно связанные через штоки с наклонной шайбой 3, вращающейся с одной угловой скоростью с блоком цилиндров. Ось вращения наклонной шайбы смещена на угол α относительно оси вращения блока цилиндров. В результате этого при совместном вращении блока цилиндров и наклонной шайбы от исполнительного двигателя плунжеры насоса совершают возвратно-поступательное движение во внутренней расточке блока цилиндров.
Возвратно-поступательное движение плунжеров вызывает увеличение объема в цилиндре на линии всасывания жидкости и его уменьшение на линии ее нагнетания. Вращающийся блок последовательно перемещает цилиндры через распределитель 4 с линии всасывания на линию нагнетания. Производительность насоса в этой системе зависит от величины угла α, поэтому для насоса этот параметр переменен, а для мотора постоянен и максимально возможен.
Рис. 49. Схема устройства и принцип работы аксиально-поршневых гидромашин
77
Давление рабочей жидкости от насоса через патрубок нагнетания и распределитель гидромотора поступает в блок его цилиндров и оказывает давление на плунжеры, помещенные в блоке цилиндров. Давление на поршень через шток передается на наклонную шайбу гидромотора, где оно раскладывается на две составляющие: осевую и тангенциальную. Осевая составляющая этого усилия уравновешивается упорным подшипником наклонной шайбы, а ее тангенциальная составляющая создает вращающий момент, воздействующий на объект управления.
4.4.2. Линейные исполнительные двигатели систем автоматики
По виду подаваемой энергии линейные исполнительные двигатели делятся на гидравлические (пневматические), электрогидравлические и электромеханические.
Гидравлические (пневматические) линейные исполнительные двигатели
Гидравлические (пневматические) линейные исполнительные двигатели бывают двух типов: поршневые (рис. 50,а) и мембранные (рис. 50,б). Поршневые линейные исполнительные двигатели имеют надпоршневую и подпоршневую полости, в которые последовательно насосом через распределительное устройство подается давление рабочей жидкости. Под давлением этой жидкости поршень 2 совместно со штоком перемещается в цилиндре 1, создавая управляющее воздействие на объект управления. При этом из противоположной полости цилиндра рабочая жидкость вытесняется на слив.
Мембранные линейные исполнительные двигатели состоят из корпуса 1, между половинами которого помещена мембрана 2, соединенная со штоком 3. Мембрана со штоком пружиной 4 удерживается в верхнем положении.
78

Рис. 50. Схемы гидравлических (пневматических) линейных исполнительных двигателей
При подаче давления управления Р рабочей жидкости в верхнюю полость корпуса двигателя его мембрана прогибается и, линейно перемещая шток 3, сжимает пружину 4. Вместе со штоком перемещается и объект управления. При снятии давления рабочей жидкости пружина 4 возвращает в исходное состояние мембрану и шток.
Электрогидравлические линейные исполнительные двигатели
Электрогидравлический линейный исполнительный двигатель (толкатель) (рис. 51,а) состоит из гидроцилиндра 1, поршня 2, связанного с рамочным штоком 3, электромотора 4, вал которого приводит во вращение турбину 6.
Рис. 51. Схемы линейных исполнительных двигателей: а − электрогидравлического; б − электромеханического
79
Во внерабочем отключенном состоянии поршень 2 этого двигателя всегда находится в нижнем положении. При подаче сигнала управления включается электромотор 4, который начинает вращать турбину 6. Вращающаяся турбина перегоняет через патрубок 5 рабочую жидкость из верхней полости цилиндра
вего нижнюю полость, создавая рабочее давление на поршень 2. Под действием этого давления поршень совместно с рамочным штоком 3 и объектом управления перемещается вверх по цилиндру, выталкивая рабочую жидкость из верхней полости
впатрубок 5.
Рамочный шток связан с объектом управления, поэтому этот объект перемещается совместно со штоком. При снятии сигнала управления обратным воздействием объекта управления на шток производится перемещение поршня в исходное положение, при этом рабочая жидкость по патрубку 5 снова переливается из нижней полости цилиндра в верхнюю.
Электромеханические линейные исполнительные двигатели
Электромеханический линейный исполнительный двигатель (рис. 51,б) состоит из статорной обмотки электромотора 1 и полого вращающегося ротора 2, выполненного в форме винтовой пары.
При подаче сигнала управления на электромотор его ротор 2 начинает вращаться. Ротор этого мотора выполнен в форме полого вала и неподвижен в линейном осевом перемещении. Во внутренней полости ротора имеется винтовая нарезка в форме гайки, в которую ввинчивается шток, не имеющий свободы вращения. При ввинчивании невращающегося штока во вращающуюся, но лишенную свободы линейного осевого перемещения гайку происходит линейное осевое перемещение этого штока. Направление перемещения штока зависит от направления вращения гайки совместно с ротором.
80