

книги / Элементы и структуры систем автоматизации технологических процессов нефтяной и газовой промышленности
..pdfПри снятии сигнала управления Ру пружина 3 перемещает мембрану 2 и клапан 4 в исходное положение. Этот клапан перекрывает поступление сжатого воздуха в торцевую полость золотниковой коробки 5, в результате чего под действием пружины 7 золотник 6 возвращается в исходное состояние, закрывая канал соединения входного и выходного отверстий золотниковой коробки. При этом на выходе пневматического реле выходной сигнал Ро скачкообразно снижается до нуля.
4.2.3.Электрогидравлические и механические реле
Вэлектрогидравлическом реле (рис. 39) для управления ис-
пользуется сигнал постоянного тока с напряжением Uу, который подается на катушку электромагнита 1. Якорь этого электромагнита 2 перемещает клапан 4, который через золотник 6 управляет потоком внешней гидроэнергии, подаваемой на вход золот-
никовой коробки 5. При подаче сигнала управления Uу якорь 2 поднимает клапан 4, и рабочая жидкость устремляется в торцевую полость золотниковой коробки 5, перемещая золотник 6
вниз. При этом реле срабатывает, в результате чего давление Ро со входа золотниковой коробки передается на ее выход.
Рис. 39. Схема электрогидравлического реле
61
Механические реле представлены в системах автоматики пусковыми кнопками, конечными выключателями или контактными датчиками. Замыкание и размыкание силовых контактов в этих реле происходит под действием определенных механических устройств.
4.3.Источники внешней энергии, или усилители сигналов
Втом случае, когда энергии источника информации (датчика) недостаточно для воздействия на объект управления, в системах управления используют дополнительные внешние источники энергии, которые должны обеспечивать пропорциональный подвод этой энергии к объекту управления. Такие пропорциональные источники внешней энергии чаще называют усилителями сигналов. По виду энергии усиливаемого сигнала усилители делятся на усилители электрических сигналов, пневматические усилители и гидравлические следящие усилители.
4.3.1. Усилители электрических сигналов
Усилители электрических сигналов бывают электронными, электромашинными и магнитными.
Электронный усилитель сигналов
Основой электронного усилителя (рис. 40) является электронный элемент, который называется транзистором, в его структуре имеются три электрода: эмиттер (Э), коллектор (К), база (Б).
Эмиттер – электрод транзистора, через который заряды поступают в него. Коллектор – электрод, через который происходит сток зарядов из транзистора. База – управляющий электрод, на который подается управляющий сигнал и с помощью которого производится управление потоком энергии, проходящей через транзистор. В транзисторе сопротивление перехода Э − К зависит от величины и полярности напряжения перехода Э − Б. При отсутствии напряжения на базе сопротивление перехода
62

Э − К транзистора максимальное, поэтому ток через него равен нулю. При подаче отрицательного потенциала на базу транзистора он начинает открываться пропорционально этому напряжению, т.е. сопротивление перехода Э − К падает.
Рис. 40. Схема однокаскадного электронного усилителя сигнала (а) и его характеристика (б)
Работу усилителя рассмотрим при подаче на базу транзистора знакопеременного синусоидального напряжения. Работа усилителя зависит от наличия на базе транзистора первоначального постоянного потенциала (напряжения смещения Uсм).
При отсутствии напряжения смещения на базе транзисто-
ра усилитель работает следующим образом. При положительной полуволне входного сигнала транзистор остается закрытым, т.е. его сопротивление в направлении Э − К максимально, поэтому выходной сигнал Uвых на сопротивлении нагрузки Rн будет равен нулю (кривая 1 на рис. 40,б). При нарастании отрицательной полуволны входного сигнала транзистор начинает пропорционально открываться, в результате этого падает его сопротивление в направлении Э − К, поэтому пропорционально возрастает величина выходного сигнала Uвых. Его значение увеличивается до величины Е напряжения источника питания усилителя. При снижении амплитуды отрицательной полуволны транзистор начинает пропорционально закрываться, вновь уменьшая до нуля
63
амплитуду выходного сигнала. Таким образом, при отсутствии напряжения смещения транзистор усиливает только отрицательную полуволну входного сигнала.
При наличии напряжения смещения на базе транзистора уси-
литель работает следующим образом. Если на базу транзистора через сопротивление смещения Rсм предварительно подать отрицательный потенциал соответствующей величины, то транзистор наполовину открывается даже при отсутствии входного сигнала. После чего при подаче положительной полуволны входного сигнала предварительно открытый транзистор начинает закрываться, при этом выходной сигнал Uвых по мере возрастания амплитуды положительной полуволны входного сигнала начнет пропорционально уменьшаться (кривая 2 на рис. 40,б), а по мере уменьшения амплитуды входного сигнала он снова возрастает до напряжения смещения. При подаче отрицательной полуволны входного сигнала предварительно открытый наполовину транзистор начнет и далее открываться, при этом выходной сигнал по мере увеличения амплитуды отрицательной полуволны будет возрастать относительно выходного напряжения транзистора, открытого сигналом смещения. При спаде до нуля полуволны входного сигнала выходной сигнал будет снова уменьшаться до уровня выходного напряжения транзистора, открытого сигналом смещения.
Таким образом, выходной сигнал электронного усилителя колеблется относительно напряжения смещения пропорционально входному сигналу, т.е. обе полуволны входного сигнала в этом случае оказываются усиленными. Однако входной и выходной сигналы усилителя противоположны по фазе. Для их согласования по фазе необходимо выходной сигнал снимать с инверсного выхода усилителя (кривая 4 на рис. 40,б).
Электромашинный усилитель сигналов
Основой электромашинного усилителя сигнала (рис. 41,а) является специальный генератор постоянного тока без дополнительных полюсов.
64
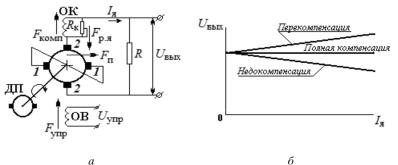
Электромашинный усилитель (ЭМУ) состоит из приводного короткозамкнутого двигателя (ДП), жестко связанного с якорем усилителя. Приводной двигатель является источником внешней энергии усилителя. В состав усилителя входят две статорные обмотки, одна из которых − обмотка возбуждения (ОВ), другая − обмотка компенсации (ОК).
Рис. 41. Схема двухкаскадного электромашинного усилителя (а) и его характеристика (б)
Сигнал постоянного напряжения снимается с якоря усилителя через две пары взаимно перпендикулярных щеток 1−1 и 2−2. При подаче сигнала управления на обмотку возбуждения возникающий магнитный поток управления Fупр сцепляется
ссекциями вращающейся якорной обмотки. В этих секциях наводится ЭДС, максимальное значение которой первоначально снимается со щеток 1−1. При замыкании щеток 1−1 накоротко в подключенных к ним секциях якорной обмотки создается по-
перечный магнитный поток Fп, перпендикулярный магнитному потоку ОВ, но превосходящий этот магнитный поток по напряженности. Вращающиеся секции якорной обмотки сцепляются
сэтим поперечным потоком, создавая ЭДС второго каскада усиления, максимальное значение которой снимается со щеток 2−2. Эта ЭДС является выходным сигналом ЭМУ.
При замыкании щеток 2−2 на сопротивлении нагрузки R в замкнутых на них секциях якорной обмотки течет ток, который создает магнитный поток реакции якоря Fр.я, направленный
65

встречно магнитному потоку управления. Магнитный поток реакции якоря уменьшает величину выходного сигнала тем больше, чем выше значение тока якоря Iя. Это явление неблагоприятно отражается на характеристике усилителя (см. кривую недокомпенсации на рис. 41,б).
Для устранения этого недостатка в цепь якорной обмотки последовательно включается статорная обмотка компенсации ОК, которая создает магнитный поток Fкомп, направленный встречно магнитному потоку реакции якоря Fр.я и согласно с магнитным потоком управления Fупр. Величина потока Fкомп регулируется потенциометром Rк, подключенным параллельно ОК. За счет этого потенциометра можно получить полностью скомпенсированную и перекомпенсированную характеристики усилителя (см. рис. 41,б).
Магнитный усилитель сигналов
Принцип работы магнитного усилителя основан на изменении реактивного (индуктивного) сопротивления переменному току за счет подмагничивания постоянным током управления его магнитопроводов. Согласно закону Ома для переменного тока, его величина определяется следующим уравнением:
I = |
|
U |
, |
(17) |
|
R2 |
+ (ωL)2 |
||||
|
|
|
где U – напряжение в цепи переменного тока; Rн – активное сопротивление нагрузки; ω – частота переменного тока;
L – индуктивность магнитной цепи,
L = k · , |
(18) |
где – магнитная проницаемость материала магнитопроводов.
Под магнитной проницаемостью понимают способность магнитного материала к намагничиванию.
66

Магнитный усилитель (рис. 42,а) состоит из двух магнитопроводов 1, двух последовательно соединенных рабочих обмоток 2, обмотки управления 3. Рабочие обмотки наматываются встречно (начало одной соединяется с началом другой), что позволяет скомпенсировать наводку трансформаторной ЭДС в обмотке управления. Обмоткауправленияявляетсяобщейдлядвухмагнитопроводов.
Принцип работы магнитного усилителя основан на процессе насыщения его магнитных потоков в магнитопроводах. Это происходит в результате их подмагничивания от обмотки управления постоянным магнитным полем.
Рис. 42. Схема магнитного усилителя (а), характеристика магнитной проницаемости магнитопровода (б)
и выходная характеристика усилителя (в)
Кривая изменения магнитной проницаемости магнитных материалов в зависимости от величины подмагничивающего тока i (рис. 42,б) показывает, что с увеличением тока подмагничивания намагничивающая способность магнитного материала нелинейно падает, в результате этого снижается индуктивность магнитопровода, а следовательно, согласно уравнению (17) снижается индуктивное сопротивление системы переменному току. Поэтому этот ток возрастает в зависимости, обратной изменению магнитной проницаемости (рис. 42,в).
Характеристика магнитного усилителя (см. рис. 42,в) по значению рабочего тока Iр нелинейна и однополярна вне зависимости от знака сигнала управления Iупр. В этом заключен серьезный недостаток магнитного усилителя, реализованного по
67
этой схеме. Для улучшения этой характеристики в схему усилителя вводят дополнительную обмотку (обмотку смещения), на которую подают постоянный ток смещения Iсм такой величины, чтобы начало координат новой характеристики магнитного усилителя смещалось по ней в сторону относительной ее линейности. За счет тока смещения началом координат новой характеристики магнитного усилителя становится точка 0', отстоящая от начальной нулевой точки на величину Iсм (см. рис. 42,в).
Относительно новых координат (I'р и I'упр) характеристика магнитного усилителя становится биполярной с преобладанием относительной линейности в области нулевых значений тока управления I'упр.
4.3.2.Пневматический усилитель сигналов
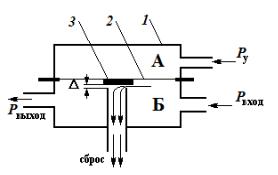
Всистемах пневмоавтоматики применяются пневматические усилители сигнала. Однокаскадный пневматический усилитель (рис. 43) состоит из корпуса 1, между двумя половинками которого помещена мембрана 2 с закрепленным в ее центре клапаном 3.
Вверхнюю надмембранную половину А корпуса по специальному
патрубку подается давление сигнала управления Ру. Давление источника внешней энергии Рвход по отдельному патрубку подается внижнюю подмембранную половину Б корпуса усилителя. В этой же половине корпуса есть еще два патрубка: один из них является выходным патрубком усилителя, а другой (патрубок сброса) соединяет подмембранную полость Бкорпусас атмосферой.
Рис. 43. Схема однокаскадного пневматического усилителя
68
При отсутствии сигнала управления Ру мембрана 2 усилителя устанавливается с некоторым зазором ∆ относительно торца патрубка сброса, при этом все давление входа из полости Б практически сбрасывается в атмосферу. Поэтому на выходе усилителя выходной сигнал равен нулю. При подаче сигнала управления в надмембранную полость А корпуса усилителя его мембрана начнет прогибаться пропорционально величине давления управления. Прогиб мембраны уменьшает зазор ∆, что сокращает количество сброса в атмосферу воздуха от внешнего источника энергии. В результате этого на выходе усилителя появляется давление, величина которого пропорциональна уровню входногосигнала.
4.3.3. Гидромеханический следящий усилитель сигналов
Гидромеханические следящие усилители (рис. 44) применяются чаще всего как усилители мускульного воздействия на объект управления.
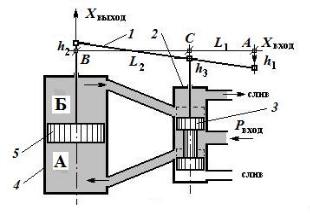
Рис. 44. Схема гидромеханического следящего усилителя
Гидромеханический следящий усилитель состоит из рычага 1, к которому в точке С шарнирно прикреплен шток привода золотника 3, а в точке В шарнирно закреплен шток поршня 5 силового гидроцилиндра 4. К свободному концу рычага в точке
69
А прикладывается мускульное усилие управления Хвход, а другой
его конец в точке В с усилием Хвыход воздействует на объект управления. Золотник 3 помещается в золотниковой коробке 2,
которая связана напорным и сливным патрубками с силовым гидроцилиндром 4. Давление жидкости Рвход от внешнего источника подается к кольцевой расточке золотника.
При перемещении вниз рычага 1 на величину h1 под действием мускульного усилия, приложенного в точке А, он начинает поворачиваться относительно точки В. При этом точка С его сопряжения со штоком золотника 3 перемещается вниз на величину h3, в результате чего золотник перемещается в золотниковой коробке на эту величину в том же направлении. Перемещение золотника вниз обеспечивает соединение его кольцевой расточки со входным отверстием нижнего патрубка, связывающего золотник с нижней полостью А силового цилиндра 4, поэтому давление Рвход рабочей жидкости передается в эту полость силового цилиндра. В результате этого поршень 5 цилиндра двигается вверх, а его шток перемещает объект управления на величину h2. Одновременно из полости Б силового гидроцилиндра рабочая жидкость поступает через золотник на слив.
По мере перемещения точки В рычаг поворачивается относительно точки А, при этом его точка С перемещается вместе со штоком золотника в этом же направлении (вверх) пропорционально отношению (L1 + L2)/L1 плеч рычага. Как только это перемещение достигнет величины h3, золотник 3 вновь займет исходное положение, а система перейдет в равновесное состояние.
4.4. Исполнительные устройства
Исполнительные устройства систем автоматики бывают активными и пассивными. К активным исполнительным устройствам относятся двигатели вращения и линейные двигатели. Пассивные исполнительные устройства − это устройства, которые изменяют параметры объектов управления. Такие исполнительные устройства относят также к параметрическому типу. К пассивным устройствам относят: управляемые муфты и управляе-
70