

70
.pdfРасчёт якорной обмотки
Число коллекторных пластин
K uп Z 3 31 93
Приняв Uк.ср.=18 В, получим минимальное число коллекторных пластин
Kmin 2pUном 2 2 330 73
Uк.ср. 18
Приняв tк.min=0,005м, получим максимальное число коллекторных пластин
Kmax 0,7 Da 0,7 0,261 115 tк.min 0,005
Таким образом
Kmin K uпZ Kmax; 73 uп 31 115; uп 3;
Зная К, определим число витков в секции
Wc |
|
|
|
|
|
|
60a Ea |
|
|
60 2 16,5 |
1 4 |
|
K D a B |
n l |
93 0,261 0,68 0,66 1300 0,228 |
||||||||||
|
|
|
|
|
a |
|
1ном |
|
|
|||
Где Ea Uном 1 Ra* 330 (1 0,05) 16,5 |
|
|||||||||||
Определим первый частичный шаг |
|
|||||||||||
y1 uп y1п 3 8 24 |
|
|
|
|
||||||||
y |
|
Z |
|
31 |
|
8 |
|
|
|
|
|
|
2p |
|
|
|
|
|
|
||||||
1п |
|
|
4 |
|
|
|
|
|
|
|
||
Т.к. обмотка петлевая yк 1, второй частичный шаг |
|
|||||||||||
y2 |
yк y1 16 |
|
|
|
|
|
||||||
По полученным значениям строим схему-развёртку простой петлевой обмотки (Прил).
Расчёт электропривода
Wр(s) |
Wум(s) |
Wг(s) |
Wд(s) |
Регулятор |
Усилитель |
Генератор |
Двигатель |
|
мощности |
|
|
|
|
|
WBR(s) |
|
|
|
Тахогенератор |
Рис. Структурная схема электропривода
|
|
|
Выражения передаточных функций Wi(s) |
Таблица 1 |
||||||||
Wум(s) |
Wг(s) |
|
|
Wд(s) |
|
|
WBR(s) |
Wпи(s) |
|
Wп(s) |
||
Kyм |
|
KГ |
|
|
|
KД |
|
|
KBR |
KПИ |
1 |
Kп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ТГs 1 |
|
|
|
|
ТПИ s |
|
||||
|
|
|
ТД2 s2 ТДs 1 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
Таблица 2 |
|
|
Значение коэффициентов и постоянных величин |
|
|||||||||
Кум |
Кг |
|
Тг |
|
Тд |
|
Кд |
КBR |
Кпи |
|
Тпи |
|
1,5 |
2,2 |
0,12 |
0,16 |
1,8 |
3,5 |
0,08 |
|
12,0 |
||||
|
|
|
|
|
|
|
|
|
R |
C |
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
U |
Uвых |
|
|
|
R |
|
D |
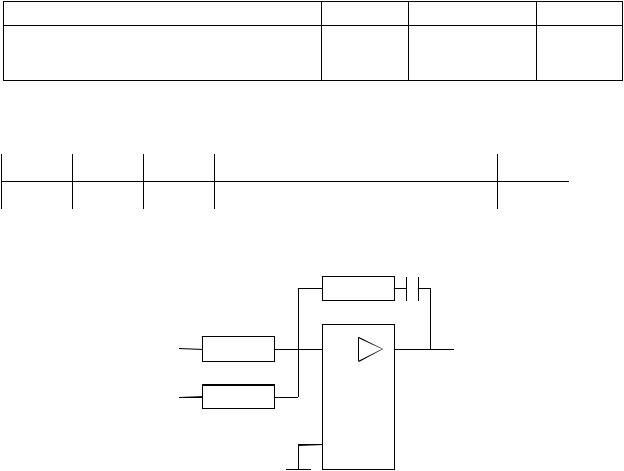
Рис. Принципиальная схема электропривода с ПИ регулятором
Для анализа системы управления ЭП используют аппарат теории управления. Систему автоматического управления ЭП исследуют на устойчивость и определяют показатели качества. Устойчивость и качественные показатели работы системы АЭП определяют по переходному процессу. Построение переходного процесса является достаточно трудоемкой процедурой. Однако существуют косвенные методы или критерии для определения устойчивости и качественных показателей.
Для построения переходного процесса можно использовать среду программирования VisSim (MathCad, ASOTAR и др.).. По полученному переходному процессу определяют устойчивость системы ЭП (ПП затухающий) и показатели качества.
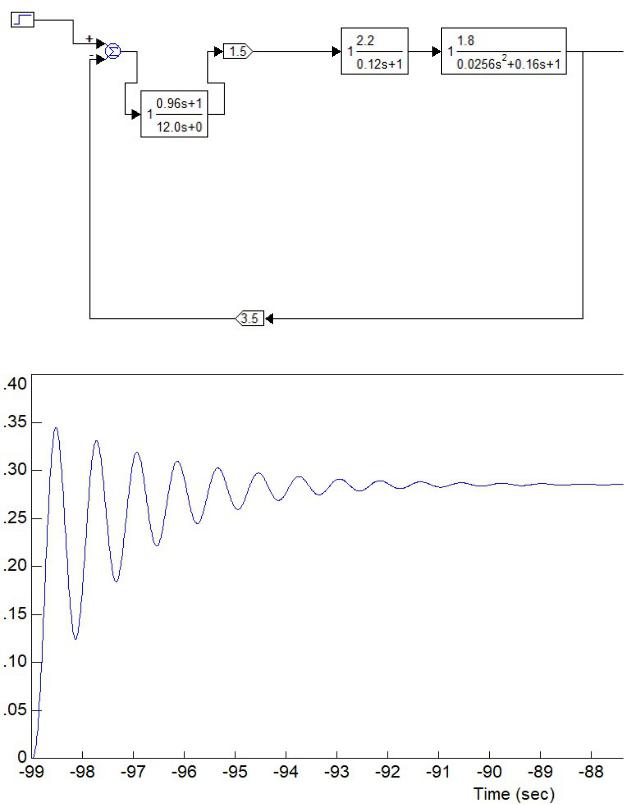
Рис. Структурная схема
Рис. Переходный процесс
При моделировании системы ЭП в среде VisSim получаем переходную характеристику, которая показана на рисунке. Переходный процесс получается прямым решением ДУ системы ЭП – математической модели. По виду переходного процесса определяется характер
устойчивости(работоспособности) системы ЭП. Для устойчивой системы ЭП переходный процесс должен затухать в соответствии с задающим воздействием. В результате моделирования в среде VisSim получен затухающий переходный процесс, следовательно, исследуемая система ЭП устойчива.
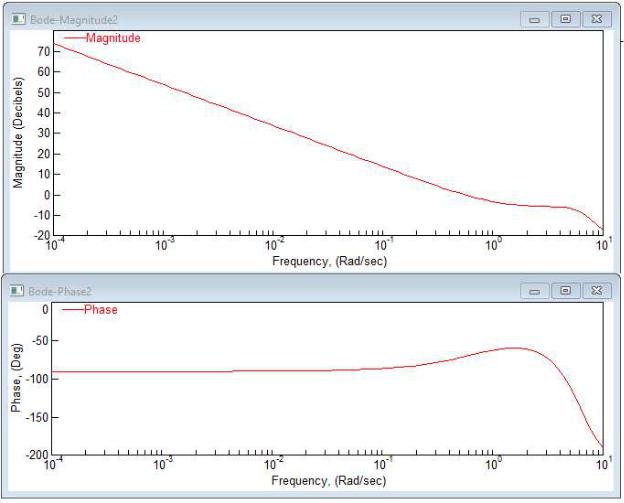
Рис. Характеристики ЛАЧХ и ЛФЧХ.
Заключение
Нами был исследован двигатель постоянного тока, построена схема развёртка и рассчитана устойчивость системы привода, построены логарифмические частотные характеристики.
Библиографический список
1.Методические указания к выполнению курсовой работы по дисциплине «Электрические машины и электропривод» для студентов специальностей «Локомотивы», «Вагоны», «Электрический транспорт железных дорог» всех форм обучения/ Буштрук Т.Н., Брятова Л.И.- Самара: СамГапс, 2005.-30с.