

книги / Металлорежущие станки
..pdfSz = А · m,
где m – целое число.
Таблица 5 Приближенные значения передаточных отношений
i |
a/b |
i, % |
i |
a/b |
i, % |
i |
a/b |
i, % |
1/1,25 |
4/5 |
+0,76 |
1/1,256 |
1/4 |
+0,81 |
1/1,404 |
1/4 |
+1,19 |
1/1,252 |
7/11 |
+0,95 |
1/1,40 |
5/7 |
+0,71 |
1/1,60 |
7/11 |
+0,47 |
1/1,253 |
1/2 |
+0,81 |
1/1,402 |
1/2 |
–0,6 |
1/1,602 |
2/5 |
–0,25 |
1/1,254 |
2/5 |
+1,52 |
1/1,403 |
19/53 |
–0,56 |
1/1,603 |
1/4 |
–1,57 |
Найденную сумму чисел зубьев следует согласовать с отраслевым стандартом Н21-5 (прил. 2).
После определения Sz вычисляют числа зубьев колес:
z1 |
= |
SZ a1 |
, |
z2 = |
SZ b1 |
, |
z3 = |
SZ a2 |
, z4 = |
SZ b2 |
. |
|
|
||||||||||||
|
||||||||||||
|
|
a1 +b1 |
|
a1 +b1 |
|
a2 +b2 |
a2 +b2 |
|||||
Если сумма чисел зубьев сопряженных колес получается больше 100–120, то ее можно уменьшить, отбросив то передаточное отношение, которое приводит к большому значению А. По установленным вновь значениям А и SZ определяют числа зубьев для всех зубчатых колес группы. При этом числа зубьев для отброшенной передачи получаются дробными, и их нужно округлить до целых чисел так, чтобы передаточное отношение возможно меньше отличалось от нужного значения. В результате округления сумма чисел зубьев передачи будет на 1–2 зуба отличаться от принятой и эту передачу придется корригировать.
Табличный метод расчета (подбора) чисел зубьев предложен профессором А.С. Прониковым. В табл. П1.2 (прил. 1) приведены рекомендуемые суммы чисел зубьев и наименьшее число зубьев для каждой суммы в зависимости от передаточного отношения.
121

Проверка кинематического расчета
После расчета чисел зубьев колес коробки скоростей и диаметров шкивов следует уточнить кинематическую схему станка. При этом узлы, которые не разрабатываются, следует заимствовать из станка-прототипа. Далее необходимо:
1)рассчитать действительные частоты вращения шпинделя, для чего составить уравнения кинематического баланса для всех ступеней скорости, используя график частот вращения и кинематическую схему;
2)определить отклонения действительных частот вращения шпинделя от стандартных значений по формуле
nj = nдjn− nстj 100 %,
стj
где nдj – действительные частоты вращения; nстj – частоты вра-
щения стандартного ряда; 3) сравнить полученные данные с предельно допустимым
отклонением, %, определяемым по формуле
[ n]= ±10(ϕ −1).
Если отклонения действительных частот вращения превышают допустимые значения, необходимо скорректировать расчет, например изменяя передаточное отношение постоянной передачи, или принять другой конструктивный вариант.
Обратная задача (кинематический анализ привода)
Заключается в построении графика частот вращения шпинделя по известной кинематической схеме коробки скоростей. Для этого необходимо:
1. По кинематической схеме определить конструктивный порядок переключения коробки скоростей.
122
2.Отдельно для каждой группы передач выписать в возрастающем порядке передаточные отношения, представленные
ввиде простых дробей.
3.Найти соотношение передаточных отношений в каждой группе, для чего каждое из них разделить на ближайшее меньшее.
4.Наименьшее из найденных соотношений является знаменателем геометрического ряда (округлить до стандартного), а группа передач с таким соотношением – основная. Группа передач с большим соотношением – первая переборная, с еще большим – вторая переборная и т.д.
5.Составить полную структурную формулу.
6.Построить структурную сетку.
7.Составить уравнение кинематического баланса для наименьшей частоты вращения шпинделя.
8.Выразить передаточные отношения передач, участвующих в получении nшп min, через знаменатель ряда φ.
9.Построить график частот вращения шпинделя, предварительно проведя необходимые горизонтали и вертикали. Для этого нанести на график лучи передач, участвующих в получе-
нии nшп min. Затем провести лучи остальных передач, сохраняя соотношения между ними такими же, как на структурной сетке.
Пример кинематического анализа привода
Рассмотрим анализ привода на примере коробки скоростей продольно-фрезерного станка 6652, схема которой приведена на рис. 70.
1. По кинематической схеме устанавливаем, что вращение от двигателя передается валу II постоянной передачей 40–78. Двойной подвижный блок Б1 передает вращение валу III. Вал IV получает вращение от вала III с помощью двойного подвижного блока Б2. Далее с помощью тройного подвижного блока Б3 движение передается валу V и с помощью постоянной передачи 31–61 сообщается шпинделю.
123
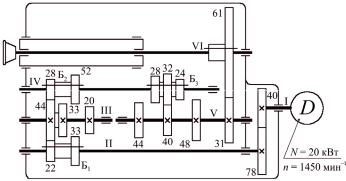
Рис. 70. Коробка скоростей станка 6652
2. Запишем конструктивный порядок переключения коробки скоростей:
Z = 1 × 2 × 2 × 3 × 1 = 12.
3. Выпишем в порядке возрастания передаточные отношения в групповых передачах:
первая группа передач (блок Б1) i11= 22/44; i12= 33/33; вторая группа передач (блок Б2) i21= 20/52; i22= 44/28; третья группа передач (блок Б3) i31= 24/48; i32= 28/44; i33=32/40.
4. Вычислим соотношения передаточных отношений в каждой группе передач:
i12:i11= 3333 4422 =2 ; i22:i21= 4428 5220 =4,08 ;
i33:i32= |
32 |
|
44 |
=1,256; |
i32:i31= |
28 |
|
48 |
=1,273 . |
|
40 |
|
28 |
|
|
44 |
|
24 |
|
124
5.Из полученных результатов следует, что знаменатель геометрического ряда φ = 1,25. Основной является группа, со-
держащая блок Б3, первой переборной – группа, содержащая блок Б1. Группа, содержащая блок Б2, является второй переборной.
6.Запишем полную структурную формулу коробки скоро-
стей:
z=1× 2×2×3×1=12.
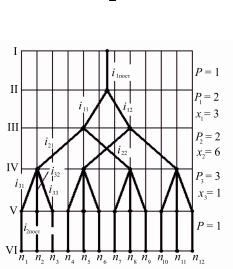
7.По даннойформулестроимструктурную сетку (рис. 71).
Рис. 71. Структурная сетка коробки скоростей станка 6652
8. Выразим передаточные отношения, участвующие в получении nшп наим, через знаменатель геометрического ряда.
Первая постоянная передача:
i1пост = 40/78 ≈ 1/2 = 1/ϕк = 1/1,25к,
откуда
1,26к = 2, к = lg2/lg1,26, а i1пост = 1/1,253.
Аналогично выразим остальные передаточные отношения:
125
i11 = 22/44 = 1/1,253; i21 = 20/52 = 1/1,254; i31 = 24/48 = 1/1,253;
i2пост = 31/61 = 1/1,253.
9. Построим график частот вращения коробки скоростей
(рис. 72).
Для этого:
1) вычислим наименьшую частоту вращения шпинделя: nшп наим = 1450 об. дв. 4078 2244 5220 2448 3161 =37,5 мин–1;
2) определим диапазон регулирования привода:
R = 1450 об. дв. =38,8; 37,5 об. шп.
3) представим в виде
38,8 = 1,25к, откуда к ≈ 16.
Значит, для построения графика необходимо провести 17 вертикалей.
Нанесем на график лучи передаточных отношений, участвующих в получении nшп наим.
Нанесем лучи остальных передаточных отношений, сохраняя соотношения между ними такими же, как на структурной сетке.
10. Составим уравнения кинематического баланса для всех частот вращения шпинделя и укажем вычисленные частоты на графике.
126

Рис. 72. График частот вращения коробки скоростей станка 6652
МЕТОДЫ УЛУЧШЕНИЯ КИНЕМАТИКИ КОРОБОК СКОРОСТЕЙ
Применение связанных колес
Связанными называют зубчатые колеса, которые принадлежат двум смежным группам передач, т.е. работают как ведущими, так и ведомыми. Их применение позволяет сократить количество зубчатых колес и осевые габариты коробок скоростей. Кинематический расчет односвязанных механизмов практически не отличается от расчета простой множительной структуры.
Задача расчета односвязанных механизмов состоит в определении числа зубьев связанного колеса и суммы чисел зубьев второй группы таким образом, чтобы радиальные габариты привода были наименьшими. Этому условию соответствует такой вариант связывания, при котором произведение передаточных отношений связанных передач равно единице, т.е. когда связан-
127

ное колесо в первой группе передач участвует в уменьшении частоты вращения на определенную величину, а во второй группе – в увеличении частоты на ту же величину (рис. 73). Применение двух и более связанных колес требует специальных методов расчета и не всегда обеспечивает изменение скоростей по геометрическому ряду.
Рис. 73. Кинематическая схема и графики частот вращения коробки со связанным колесом
Привод с двухскоростным электродвигателем
Для упрощения конструкции коробок скоростей и уменьшения их габаритов широко применяют двухскоростные асинхронные электродвигатели с короткозамкнутым ротором, отношение синхронных частот вращения которых равно 2. Такой электродвигатель можно рассматривать как электрическую множительную группу из двух передач, диапазон регулирования которой
Rэ = 2=ϕхэ ,
где φ – знаменатель ряда частот вращения шпинделя; хэ – характеристика электрогруппы,
хэ = lglg2ϕ .
128
Таким образом, каждому стандартному знаменателю соответствует определенное значение хэ:
φ |
1,12 |
1,25 |
1,40 |
2 |
хэ |
6 |
3 |
2 |
1 |
Следовательно, применение двухскоростного двигателя с Rэ = 2 ограничивает выбор структурного варианта, так как получить геометрический ряд можно лишь при определенных значениях знаменателя ряда и числа скоростей. Как правило, электрогруппа является первой переборной, и ей должна предшествовать механическая основная группа.
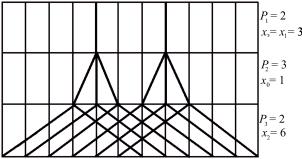
Пример 5. Построить структурную сетку для привода с двухскоростным электродвигателем при z = 12 и φ = 1,25. Для φ = 1,25 характеристика хэ = 3, поэтому структурная формула имеет вид
z = zэ × zк = 22 × 31 × 23 = 12.
Таким образом, 12 скоростей получим с помощью двухскоростного электродвигателя и механической коробки на 6 скоростей, причем электродвигатель играет роль первой переборной группы.
Рис. 74. Структурная сетка для привода с двухскоростным двигателем
Попринятойформулестроимструктурнуюсетку(рис. 74).
129
Структуры с измененными характеристиками групповых передач
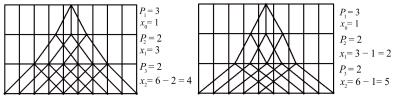
Нередко при расчете обычной множительной структуры характеристика последней переборной группы имеет такое значение, при котором диапазон регулирования этой группы оказывается больше допустимого. В таких случаях для сохранения принятой структуры искусственно уменьшают характеристику последней переборной группы до допустимых значений либо уменьшают характеристики в двух группах (рис. 75).
аб
Рис. 75. Структуры с измененными характеристиками: а – в последней; б – двух групповых передачах
Искусственное уменьшение характеристик групп ведет к уменьшению числа ступеней скорости за счет совпадения ряда скоростей и сокращению общего диапазона регулирования. Чтобы сохранить заданное число скоростей и требуемый диапазон регулирования, необходимо расчетное число скоростей увеличить на количество совпадающих ступеней, что приведет к некоторому усложнению конструкции проектируемой коробки.
Например, если требуется z = 9, 12, 18, 24, рассчитывают zр = 12, 16, 24, 32, из них совпадают zс = 3, 4, 6, 8.
Иногда для увеличения общего диапазона регулирования прибегаюткувеличениюхарактеристикиосновнойгруппы(рис. 76). В этом случае происходит выпадение скоростей по концам ряда, получается неравномерный (ломаный) ряд частот вращения, имеющий знаменатель, равный φ в середине диапазона и φ2 – по его концам.
130