

книги / Теория механизмов и машин курсовое проектирование
..pdf30
Рис. 1.11. Пример оформления первого листа
2. КИНЕТОСТАТИЧЕСКИЙ (СИЛОВОЙ) РАСЧЕТ МЕХАНИЗМОВ
2.1. Задачи силового расчета
Кинетостатический расчет механизмов заключается в нахождении неизвестных сил при заданном законе движения ведущего звена.
Определение неизвестных сил требуется при конструировании механизмов, когда для расчета деталей на прочность необходимо найти наибольшие силовые нагрузки, действующие на звенья и возникающие в кинематических парах. Если усилия в звеньях рассматриваемого механизма не остаются постоянными, то следует определять эти усилия в разных положениях механизма, а расчет на прочность производить по наибольшим усилиям.
В ТММ силовой расчет механизма основывается на принципе Д`Аламбера, сущность которого заключается в следующем:«Если к активнымиреактивнымсилам,действующимнадвижущуюсяматериальнуюсистему, добавить силы инерции, то полученная таким искусственным способом система сил будет уравновешенной»[11,12]. Этот метод называется еще кинетостатическим расчетом механизма в отличие от статического расчета, когда не учитываются силы инерции звеньев.
Силовой расчет дает возможность по заданным весам звеньев, силам инерции, силам сопротивления определять реакции в кинематических парахидвижущиесилы,необходимыедляпреодолениясилполезногосопротивления.
Определение движущей силы позволяет, предварительно оценив потери на трение, решить вопрос о потребной мощности двигателя для привода механизма.
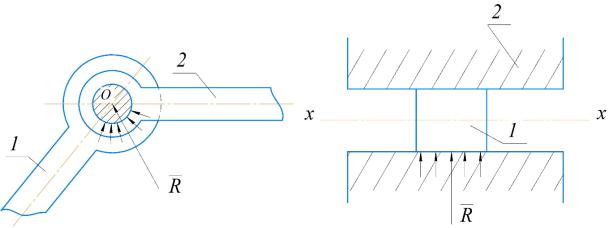
Силовой расчет плоских механизмов ведется в предположении, что кинематические пары являются низшими и содержат только вращательные (рис. 2.1, а) и поступательные (рис. 2.1, б) пары, так как в случае наличия высших кинематических пар последние могут быть заменены для каждого мгновенного положения механизма низшими.
Без учета трения сила взаимодействия между двумя звеньями всегда направленапонормаликповерхностиихкасанияи,очевидно,вовращательной кинематической паре должна пройти через центр пары – точку О. Но неизвестными остаются величина силы и направление действия этой силы.
31
а |
б |
Рис. 2.1. Низшие кинематические пары:
а− вращательная; б − поступательная
Впоступательной паре сила взаимодействия между двумя звеньями перпендикулярна к оси движения x–x этой пары, т.е. известна линия действия этой силы, но неизвестны точка ее приложения и величина.
Таким образом, для каждой низшей кинематической пары при силовом расчете механизма имеются две неизвестные величины.
Структурные группы статически определимы. Поэтому при определении неизвестных сил механизма удобно разбивать механизм на группы Ассура.
При этом к внешним кинематическим парам группы прикладываются реакции связей со стороны отброшенных звеньев. Реакция со стороны i-го
звена на j-е обозначается как Rij, причем Rij = – Rji.
2.2. Реакции связей структурных групп II класса
Варианты действия реакций связей структурных групп II класса представлены на рис. 2.2.
Вовращательнойпаререакцияраскладываетсянанормальнуюсоставляющую, например Rn12 (направлена вдоль звена), и тангенциальную Rτ12 (направлена перпендикулярно звену): R12 = Rn12 + Rτ12.
В поступательной паре линия действия реакции перпендикулярна направляющей. Точка приложения реакции характеризуется расстоянием h. Внутренние реакции группы схематично показаны в виде штриховых линий.
32
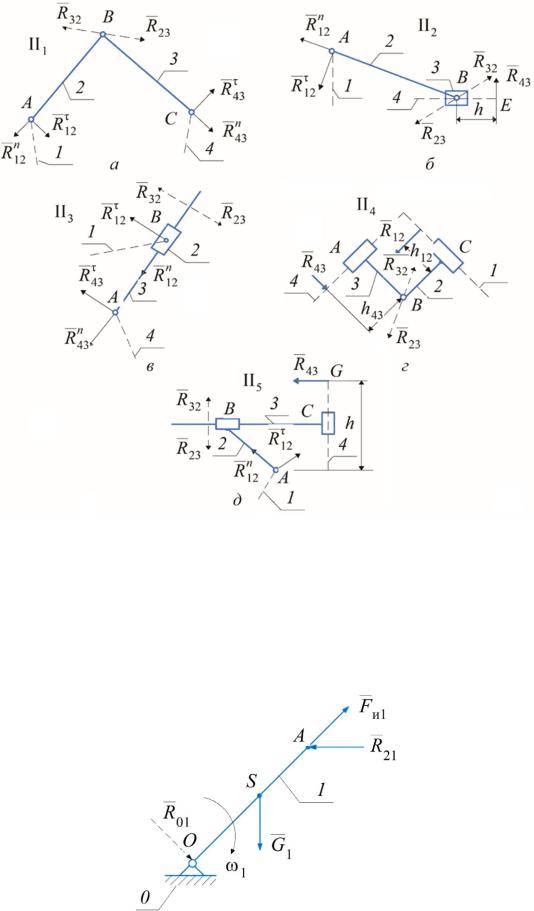
Рис. 2.2. Схемы действий реакций в структурных группах II класса:
а– II1, б – II2, в – II3, г – II4, д – II5
2.3.Силовой расчет механизма І класса
Врезультате разбиения механизма на группы Ассура остаются ведущеезвено(иливедущиезвенья)состойкой,образующиемеханизмІкласса, расчетная схема которого для случая ω1 = const представлена на рис. 2.3.
Рис. 2.3. Механизм І класса
33
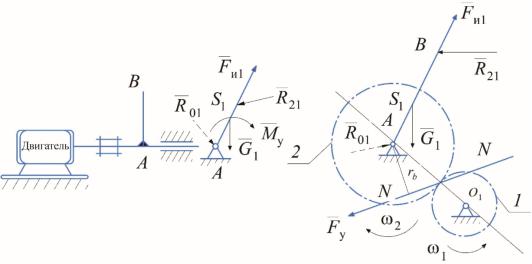
В общем случае на ведущее звено при равномерном его вращении действуют следующие силы: сила веса G1, сила инерции Fи1, реакция от стойки
R01,иреакцияR21 состороныотсоединенныхструктурныхгрупп(см.рис.2.3). В кинематической паре О число неизвестных равно двум, а для ведущегозвенаможносоставитьтриуравненияравновесия.Следовательно,механизмпервогоклассастатическинеопределим,таккакчислоуравнений
равновесия на единицу больше числа неизвестных.
Для того чтобы имело место равновесие, необходимо дополнительно ввести силу (или пару сил), уравновешивающую все силы, приложенные к ведущему звену. Эта сила или момент пары сил называется уравновешива-
ющей силой или уравновешивающим моментом.
При анализе работы любой машины можно убедиться в этом, так как к ведущему звену, действительно, приложены движущий момент в виде сил или сосредоточенной силы, которые приводят в движение рассматриваемую машину.
Например,еслиглавныйвалрабочеймашинысоединенсваломдвигателя посредством муфты, то для равновесия ведущего звена прикладывается уравновешивающий момент Mу (рис. 2.4,а). Если главный вал рабочей машины
соединенсваломдвигателяпосредствомзубчатойпередачи,тодляравновесия ведущегозвенаприкладываетсяуравновешивающаясилаFy (рис.2.4,б).
а |
б |
Рис. 2.4. Равновесие механизма I класса
Направление линии действия уравновешивающей силы определяется из рассмотрения конструкции передаточного механизма, связывающего звено АВ с валом, от которого звено АВ само приводится в движение. На рис.2.4, бизображенприводввидезубчатойпередачи.Здесьдвижущая сила передается на вал кривошипа по линии зацепления N−N.
34
Определение уравновешивающего момента или силы производится из уравнения моментов всех сил, действующих на звено АВ, относительно точки А:
My = |
– MA G1 |
+ MA R21 (см. рис. 2.4, а); |
||
F |
= |
– MA G1 |
+ MA R21 |
(см. рис. 2.4, б). |
|
|
|||
y |
|
|
rb |
|
Усилие R01 в кинематической паре А определяется из уравнения равновесия звена. Для первого случая (см. рис 2.4, а):
G1 + Fи1 + R21 + R01 = 0.
Для второго случая (см. рис. 2.4, б):
G1 + Fи1 + R21 + Fy + R01 = 0.
2.4.Алгоритм силового расчета
1.Для заданного положения механизма определяются силы инерции, моменты от сил инерции, которые вместе с заданными внешними силами и моментами сил прикладываются к соответствующим звеньям.
2.Всоответствиисосхемамирис.2.2 последовательноотсоединяются группы Ассура, наиболее удаленные от ведущего звена. К ним прикладываются внешние реакции связей и проводится силовой расчет.
3.На заключительном этапе, используя результаты пункта 2, рассчитывается механизм первого класса с учетом внешних реакций на ведущее звено со стороны отброшенных структурных групп.
Замечания.
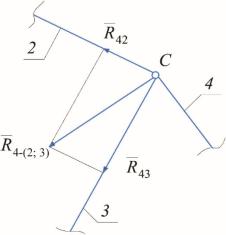
а) Если в одной точке С соединены шарнирно три звена (рис. 2.5), то для определения усилия звена 4 на каждое из звеньев 2 и 3 в отдельности суммарная реакция звена 4 на2-е и 3-е R4- 2; 3 раскладывается на составля-
ющие R42 и R43, направленные вдоль звеньев 2 и 3: R4- 2; 3 = R42 + R43.
Рис. 2.5. Соединение трех звеньев
35
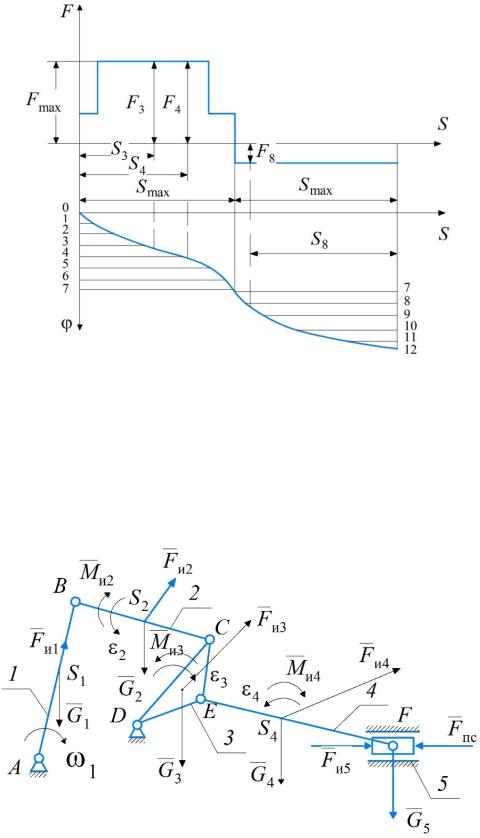
б) Если сила полезного сопротивления задана в функции пути S ведомогозвена,товэтомслучаеследуетвеличиныS нанестинаграфикF = F S с графика пути S = S φ (рис. 2.6).
Рис. 2.6. График изменения силы полезного сопротивления
2.5. Пример силового расчета
Силовой расчет механизма грохота
Для данного положения механизма (рис.2.7, а) произвести кинетостатический расчет, т.е. определить реакции во всех кинематических парах и потребную мощность двигателя.
а
Рис. 2.7. Механизм грохота: а расчетная схема механизма
36
б в
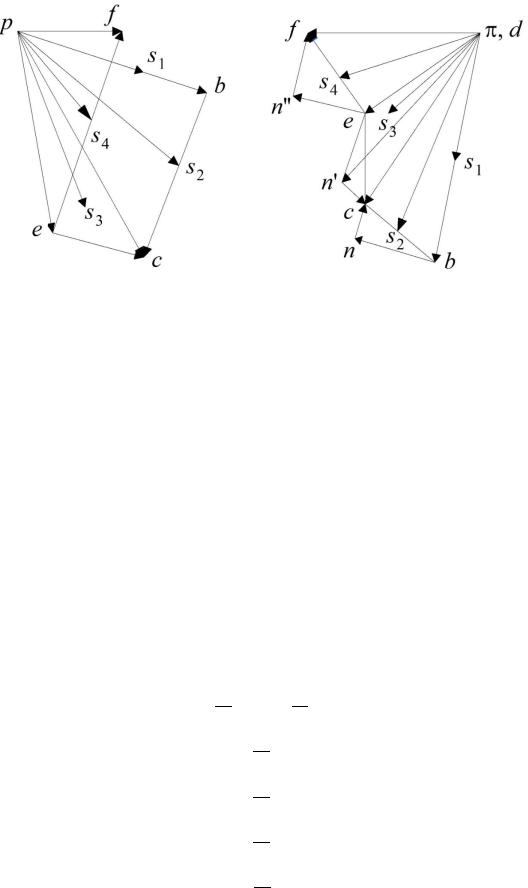
Рис. 2.7 (окончание): б план скоростей; в план ускорений
Известныразмерызвеньев;положенияцентровтяжести;веса;моменты инерциизвеньевотносительнособственныхцентровтяжестиIsi ;силаполез-
ного сопротивления Fпс; угловая скорость кривошипа ω1 = const. Главный вал рабочей машины соединен с ведущим валом посредством муфты.
А. Определение сил инерции звеньев
В общем случае плоскопараллельного движения все силы инерции каждого звена могут быть приведены к силе инерции, приложенной в центре тяжести звена, и паре сил инерции. Величина силы инерции определяется как произведение массы звена на ускорение центра тяжести
Fи |
= – Gi aS |
i |
(2.1) |
i |
g |
|
и направлена эта сила в сторону, противоположную ускорению центра тяжести. Ускорение центра тяжести берется из плана ускорений для рассматриваемого положения механизма (рис. 2.7, в). Для звеньев механизма:
Fи1 = – Gg1 aS1 = – Gg1 μa πs1 ; Fи2 = – Gg2 μa πs2 ; Fи3 = – Gg3 μa πs3 ; Fи4 = – Gg4 μa πs4 ;
Fи5 = – Gg5 μa πs5 ,
где g – ускорение земного притяжения.
37

Момент пары сил инерции равен произведению момента инерции звена относительно оси, проходящей через центр тяжести на угловое ускорение звена:
Mиi = – ISi ε̅i. |
(2.2) |
Направление действия момента пары сил инерции противоположно угловомуускорениюзвена.Угловоеускорениекаждогозвенаопределяется как частное от деления относительного тангенциального ускорения каких-
либо двух его точек на расстояние между точками: ε̅i = aτi . Тогда
li
Mи2 = – IS2∙ε̅2 = – IS2aτCB = – IS2 μal cn ;
BC
Mи3 = – IS3∙ε̅3 = – IS3 μal cn' ;
CD
Mи4 = – IS4∙ε̅4 = – IS4 μal n''f ;
EF
Так как ω1 = const, а ε1 = 0, то Mи1 = – IS1∙ε̅1 = 0.
Mи5 = 0, так как звено 5 движется поступательно.
Направление действия момента Mи2 пары сил инерции будет противоположно угловому ускорению ε̅2. Аналогичные рассуждения определяют направления Mи3 и Mи4 (рис. 2.7, а).
Б. Определение реакций в кинематических парах структурной группы второго класса второго вида (звенья 4 и 5)
Порядок рассмотрения групп при кинетостатическом расчете обратен порядку кинематического исследования. Поэтому в первую очередь рассматривается структурная группа II2, состоящая из звеньев 4; 5. Эта структурная группа со всеми действующими на нее силами включая и силы инерции показана на рис. 2.8.
Рис. 2.8. Силовой расчет группы II2 (4; 5)
38
Действие отброшенных звеньев заменено действием реакций R34 и R05, которые необходимо определить. Реакция R34 раскладывается на две составляющие:
Rn34 – действующую вдоль звена EF;
Rτ34 – действующую перпендикулярно звену EF.
При этом R34 = Rn34 + Rτ34.
Реакция R05 будет проходить через центр шарнира F, так как все силы, действующие на звено 5, проходят через точку F.
Порядок нахождения искомых реакций (давлений) в структурной группе II2 представлен в табл. 2.1.
|
|
|
Таблица 2.1 |
|
Порядок силового расчета группы II2 (4; 5) |
||
№ |
Искомые |
Уравнения |
Равновесие |
|
|
|
|
1 |
R34τ |
MF = 0 |
Звена 4 |
|
|
|
|
2 |
R34n и R05 |
F = 0 |
Структурной группы (4; 5) |
|
|
|
|
3 |
R45 |
F = 0 |
Звена 5 |
Далее рассматриваются развернутые уравнения равновесия для определения сил.
1. Величина Rτ34 может быть непосредственно получена из уравнения равновесия для звена 4.
Звено 4 находится под действием следующих сил: веса G4, силы инерции Fи4 и момента сил инерции Mи4, составляющих Rn34 и Rτ34 реакции R34 и реакции R54, которой заменено действие отсоединенного звена 5.
Так как для силы Rτ34 известна только линия действия, то при составленииуравнениямоментоввсехсил,действующихназвено4 относительно точки F, задаются произвольным знаком момента этой силы.
Если значение этой силы окажется отрицательной, то ее направление должно быть изменено на противоположное.
|
∑MF = R34τ |
∙ EF – G4∙h4'' |
+ Fи4 |
∙h4 + |
Mи |
4 |
. |
(2.3) |
|||||
Откуда |
μl |
|
|||||||||||
|
|
|
' |
|
|
|
Mи4 |
|
|
|
|
|
|
|
|
|
G4∙ h4 |
– Fи ∙h4 |
– |
|
|
|
|
|
|
|
|
|
|
|
μl |
|
|
|
|
|
|
||||
|
R34τ |
= |
|
4 |
|
|
. |
|
|
|
|
||
|
|
EF |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
39 |