

книги / Теория механизмов и машин курсовое проектирование
..pdfе
Рис. 5.4. Расчет маховика методом Мерцалова: а – график приведенных моментов сил,
б– график работ, в – график избыточных работ, г – график кинетической энергии маховика, д – график изменения кинетической энергии маховика, е – маховик
110

2.Методом графического интегрирования строятся графики соответствующих работ (см. раздел 5.3 и рис. 5.3, б, 5.4) в масштабах μА = μM∙Н∙μφ.
3.Вычтя одноименные ординаты графиков работ, получают график
избыточных работ Аизб = Ад – Ас = Т в масштабах μА и μφ (см. рис. 5.4). 4. Затем согласно разделу 5.1 определяют Тзв, например для 12 поло-
жений механизма, считая, что угловая скорость ведущего звена равна ωср. По полученным значениям строится график Tзв = Tзв( ) в том же масштабе μТ, что и график Аизб. То есть μТ = μА = μ Т (см. рис. 5.4).
5.Затем получают график изменения кинетической энергии маховика TM = Aизб – Tзв по разности соответствующих ординат (см. рис. 5.4).
6.В соответствии с формулой (5.4.1) по рис. 5.4 находят момент инерции маховика, необходимый для обеспечения заданной неравномерности хода δ.
Iм = |
μT(AB) |
, |
(5.4.2) |
2 |
|||
|
ωcp∙δ |
|
|
так как T∙AB = Aизб – Tзв max – (Aизб – Tзв)min.
Соотношение(5.4.2) дает достаточно точный результат при 1 30.
В других случаях возникает ошибка, достигающая при 0,1 значений 15 %–20 %. Это происходит из-за того, что при вычислении кинетической энергии звеньев вместо истинной угловой скорости берется средняя.
7. Для уточнения расчетов вводится поправка, дающая достаточную степень точности. С этой целью через точки а' и b', соответствующие
наибольшему и наименьшему значению Тм (см. рис.5.4), проводятся вертикальные прямые до пересечения с осью 0φ. Получают точки а и b, в ко-
торых ω = ωmax и ω = ωmin. При них из графика Тзв (см. рис. 5.4) следует:
Tзвa = μT(ас) Iа = 2μωT2(ас),(ас),
cp
Tзвb = μT(bd) Ib = 2μωT2(bd),(bd).
cp
Длины отрезков графика (ac) и (bd) измеряются в миллиметрах. С учетом поправки момент инерции маховика по (5.4.1):
IM = |
μT(AB) |
|
– |
μT |
ac + bd = |
μT |
|
AB – δ ac +bd |
. |
(5.4.3) |
2 |
2 |
2 |
|
|||||||
|
ωcpδ |
|
ωcp |
|
ωcp |
|
δ |
|
||
8. Определяются размеры и вес маховика.
111
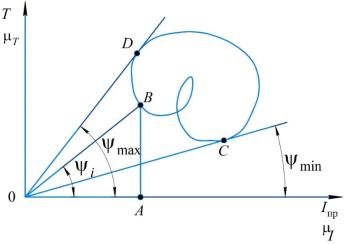
5.5. Расчет момента инерции маховика по методу Ф. Виттенбауэра
Если для каждого положения звена приведения известны значения кинетической энергии механизма Т и приведенного момента инерции Iпр,
то можно построить диаграмму энергомасс Т = f(Iпр).
За цикл установившегося движения она представляет собой замкнутуюкривую(рис.5.5), котораяпериодическиповторяетсявсилупериодич-
|
ностиизменения кинетиче- |
|||
|
ской энергии и приведен- |
|||
|
ного момента инерции. |
|||
|
Диаграмма позволяет |
|||
|
определить |
угловую |
ско- |
|
|
рость |
звена |
приведения в |
|
|
любом |
положении |
меха- |
|
|
низма. Для этого точку B |
|||
|
диаграммы, |
соответствую- |
||
|
щую i-му положению, со- |
|||
|
единяют с началом коорди- |
|||
Рис. 5.5. Диаграмма энергомасс |
нат 0 (см. рис. 5.5). |
|
||
2 |
|
μT∙AB |
|
μT |
|
|
|
||
ω1i |
= 2∙ |
|
|
= 2∙ |
|
tg i |
, |
(5.5.1) |
|
μI∙0A |
μI |
||||||||
|
|
|
|
|
|
||||
где μТ, μI – соответственно масштабы Т и Iпр диаграммы энергомасс;
ψi – угол наклона луча, соединяющего начало координат с точкой В диаграммы, характеризующий i-е положение.
Таким образом, определяется угловая скорость звена приведения для
любого положения механизма и строится кривая зависимости ω1 = ω1(φ).
Из (5.5.1):
2 |
|
μT |
|
|
2 |
|
μT |
|
|
|
ω |
= 2∙ |
|
tg |
|
; ω |
= 2∙ |
|
tg |
|
(5.5.2) |
μI |
|
μI |
|
|||||||
1max |
|
|
max |
1min |
|
|
min |
|
Максимальное и минимальное значения угловой скорости звена при-
ведения ωmax и ωmin определяются углами ψmax и ψmin наклона к оси 0Iпр лучейизначалакоординат.Этилучиявляютсяверхнейинижнейкасатель-
ными, заключающие диаграмму энергомасс. Построив кривую Т = f(Iпр) и проведякнейчерезначалокоординаткасательные0Си0D,измеряютуглы
ψmax, ψmin и затем рассчитывают коэффициент δ.
При определении момента инерции маховика Iм по методу Виттенбауэра решается обратная задача, когда Iм находится по заданным ωср и δ.
112
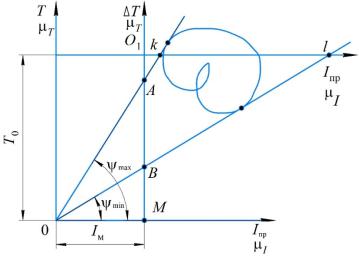
Для этого используются ранее введенные со-
отношения Т = Т0 + Т и I
=Iм+ Iпр.ТаккакТ0=const
и Iм = const,то форма кривой диаграммы энергомасс не изменится, если ее по-
строить в осях Т и Iпр
(рис. 5.6).
Из рис.5.6 точка пере-
сечениякасательныхккри- Рис. 5.6. К определению момента инерции маховика
вой энергомасс, проведен-
ныхподугламиψmax,ψmin,определяетначалокоординат0 осейТиI.Тогда масштабное значение Iм = (0М) μI.
|
|
|
|
|
|
|
M = |
|
|
|
|
|
AB |
|
|
|
. |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
tg max – tg min |
|
|
|
|
|
|
|||||||||||||
Из соотношений |
(5.5.2): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
ωmax2 μ |
I |
|
|
ωmin2 |
μ |
I |
|
|
μ |
I |
2 |
2 |
|
μ |
I |
|
2 |
|||
tg |
|
– tg |
|
|
= |
2μT |
|
– |
2μT |
|
= |
|
2∙μT |
ω |
– ω |
= |
|
|
ω δ. |
|||||||
|
max |
|
min |
|
|
|
|
|
|
|
|
max |
min |
|
μT |
cp |
||||||||||
Окончательно: Iм = (0M)μI |
= |
μT∙AB |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
. |
|
|
|
|
|
|
|
|
|
(5.5.3) |
||||||||||||||
|
ωcp2 δ |
|
|
|
|
|
|
|
|
|
||||||||||||||||
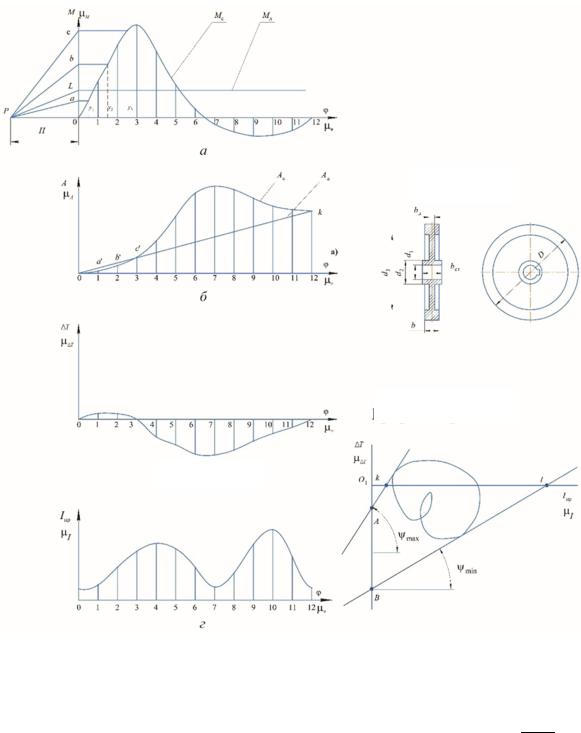
Алгоритм определения момента инерции маховика по методу Виттенбауэра
Алгоритм и порядок расчета маховика иллюстрируется на рис. 5.7.
1.Вычисляют значения и строят графики приведенных моментов сил, работ и избыточной работы (рис. 5.7) по пунктам 1–3 раздела 5.4.
2.Рассчитывают, например, для 12 положений механизма величину
Iпр по (5.1.3) и строят график зависимости Iпр f( ) (рис. 5.7).
3.Путемисключенияуглаφиззависимостей T f( )иIпр f( )строится диаграмма энергомасс T f(Iпр) (см. рис. 5.7) в масштабах T и I.
4.По формулам (5.5.2) вычисляют углы ψmax и ψmin, которые соот-
ветствуют ωmax и ωmin: tg |
= |
ωmax2 μI |
; tg |
min |
= |
ωmin2 μI |
. |
|
|
||||||
max |
|
2μT |
|
2μT |
|||
5. К диаграмме энергомасс проводят две касательные под углами
ψmax и ψmin (см. рис. 5.7).
113
в
г
е |
д |
|
|
Рис. 5.7. Расчет маховика методом Виттенбауэра: а – график приведенных моментов сил, б – график работ, в – маховик, г – график избыточных работ, д – график энергомасс, е – график приведенного момента инерции Iпр
6. Определяют момент инерции маховика по формуле Iм = μT2∙AB.
ωcpδ
В случае, когда значения ψmax и ψmin велики и касательные в пределах чертежа не пересекают ось ординат Т, отрезок АВ находят с помощью формулы:
AB = O1l∙tg min – O1k∙tg max, |
(5.5.4) |
где k и l –точки пересечения касательных с осью I (см. рис 5.7).
7. Выбирают конструкцию и определяют размеры маховика (см. раз-
дел 5.6).
114

5.6. Определение основных размеров маховика
Обычно маховик представляется массивным диском среднего диаметра D, в котором сосредоточено примерно 0,9 массы конструкции. Считается, что в этом случае
IM = |
G∙D2 |
, |
(5.6.1) |
|
|||
|
4g |
|
|
где D – средний диаметр обода маховика; G – вес маховика;
g – ускорение силы тяжести.
Величина GD2 называется маховым моментом и является основным параметром, характеризующим маховик:
GD2 4IМ g. |
(5.6.2) |
Так как в(5.6.2) входят две неизвестные величины D и G, то одной из них задаются, определяя другую из значения махового момента. Обычно из конструктивных соображений задаются диаметром маховика, а затем находят его вес.
При выборе диаметра маховика следует проверить максимальную окружную скорость на ободе V , мс
V ωmax D2 ωcp 1 δ2 D2 . |
(5.6.3) |
Чтобы при значительных скоростях не произошел разрыв обода, рекомендуется выполнение условия V [V] , где [V] – допустимое значение скорости, зависящееотматериала конструкции.Принято длячугунныхмаховиков [V] = 30 м/с, а для стальных – [V] = 50 м/с. Для кривошипных механизмов принимается D ≤ 10 l1, где l1 – длина кривошипа.
Зная диаметр маховика, находят его теоретический вес:
G = 4DIм2∙g.
Действительный вес обода Gоб = 0,9G. Используя то, что Gоб Vоб D F,
где Vоб – объем обода;
γ – удельный вес материала обода;
F – площадь сечения обода F = π∙γ∙GобD .
Определивплощадьпоперечногосеченияобода,рассчитывают егоразмеры – ширину и толщину, если сечение выбрано прямоугольной формы, или радиус, если оно – круглое.
115
Если из-за конструктивных соображений маховик нельзя установить на ведущий вал (звено приведения), то его устанавливают на другой вращающийся вал, который связан с предыдущим постоянным передаточным отношением.
Так как кинетическая энергия маховика постоянна вне зависимости от того, на каком валу он установлен, то:
|
Iм1∙ω12 Iм2∙ω22 Iм1 |
|
ω2 |
2 |
2 |
|
(5.6.4) |
||||
|
|
|
|
|
|
|
|
|
|
||
Tм = 2 = 2 Iм2 |
= |
ω1 |
|
, |
|||||||
|
= i2-1 |
|
|||||||||
где Iм1 и Iм2– соответственно моменты инерции маховика на валах 1 и 2;
1 и 2 – соответственно угловые скорости валов 1 и 2.
Если маховик установить на другой вал, обладающий большей угловой скоростью, то момент инерции и размеры маховика будут меньше.
5.7. Конструкции маховиков
Такимобразом,маховикограничиваетколебанияугловойскоростиглавноговаламашинывпределахзаданногокоэффициентанеравномерностиδ.
Маховик является аккумулятором кинетической энергии машины. Если при работе механизма с маховиком Т > 0, то угловая скорость главноговалавозрастаетимаховикнакапливаеткинетическуюэнергию.Впротивном случае, при недостатке Т угловая скорость главного вала снижается,и маховикотдает часть энергиимашине, являясь дополнительнымисточником движущих сил.
Наибольшее распространение в технике получили маховики двух типов – со спицами и дисковой конструкции.
Маховик со спицами
Конструкции этих маховиков приведены на рис. 5.8. Материал для маховиков выбирают в зависимости от окружной скорости V на наружном диаметре D.
При V ≤25 м/с применяются литые маховики из чугуна СЧ12-28, при
V ≤ 25–30 м/с – из чугуна СЧ15-32, при V ≤ 30–35 м/с – из чугуна СЧ 18-36
и СЧ21-40 (плотностью ρ = 6800–7400кг/м3), при V ≤ 45 м/с – маховики литые стальные из Ст 3 – Ст 5 (ρ = 7500–7900 кг/м3). Сечение спиц эллип-
тическое с отношением осей |
bсп |
|
0,4 0,5. Спицы выполняются кониче- |
|
aсп |
||||
|
|
|
скими. Размеры bсп и aсп уменьшаются от ступицы к ободу на 20 %.При наружном диаметре D < 300 мм маховики изготавливают дисковой конструкции без спиц. Значения размеров и массовых характеристик маховиков со спицами в соответствии с рис. 5.8 представлены в табл. 5.3.
116
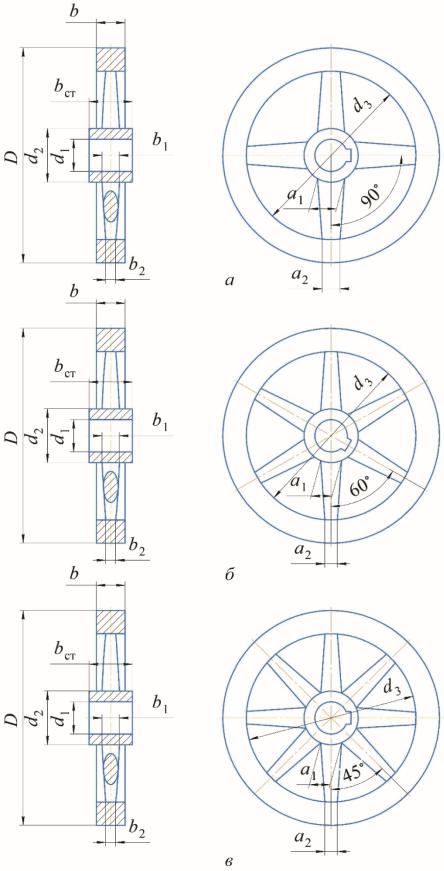
Рис. 5.8. Конструкции маховиков со спицами:
а с четырьмя спицами; б шестью спицами; в восемью спицами
117
|
|
|
|
Таблица 5.3 |
|
Основные параметры маховика со спицами |
|||
|
|
|
|
|
D, мм |
Число спиц |
|
Основные размеры, мм |
|
|
|
|
|
|
300–800 |
n = 4 |
(рис. 5.8, а) |
d1 |
= 0,2D; d2 = 0,3D; d3 = 0,08D; |
800–1600 |
n = 6 |
(рис. 5.8, б) |
b = 0,125D; b1 = 0,44b; b2 = 0,352b; |
|
|
|
|
a1 |
= 1,1b; a2 = 0,88b; bст = 1,05b |
≥ 1600 |
n = 8 |
(рис. 5.8, в) |
d1 |
= 0,2D; d2 = 0,32D; d3 = 0,08D; |
|
|
|
b = 0,125D; b1 = 0,44b; b2 = 0,352b; |
|
|
|
|
a1 |
= 0,88b; a2 = 0,704b; bст = 1,05b |
Дисковый маховик
Маховики данного типа показаны на рис. 5.9. При окружных скоростях V ≤ 45 м/с рекомендации по выбору материалов те же, что и в случае маховика со спицами. При окружных скоростях V > 45м/с для маховиков следует принимать стали марок 45, 40Н, 34ХНТМ, 35 ХМ и т.д., а также алюминиевый сплав АК4. При одном и том же моменте инерции маховики из алюминиевых сплавов получаются в среднем на 35 %легче по сравнению с конструкциями, изготовленными из стали. Рекомендовано при окружных скоростях V > 100 м/с применять маховики без отверстий в диске,чтобыизбежатьдополнительногошумаприихработе.Маховиксо сплошным диском получается на 5–8 %тяжелее маховика с отверстиями. Значения параметров дисковых маховиков приведены в табл. 5.4.
|
|
Таблица 5.4 |
|
Основные параметры дисковых маховиков |
|
|
|
|
№ |
Число отверстий |
Основные размеры, мм |
|
|
|
Рис. 5.9, а |
n = 4 |
d0 = 0,25D; d1 = 0,15D; d2 = 0,25D; d3 = |
|
|
0,525D; d4 = 0,8D; b = 0,125D; bд = 1b; |
|
|
3 |
|
|
bст = 1,05b |
Рис. 5.9, б |
n = 4 |
d1 = 0,15D; d2 = 0,6D; d0 = 0,3D; b = |
|
|
0,125D |
Рис. 5.9, в |
n = 0 |
d1 = 0,15D; d2 = 0,25D; d3 = 0,8D; b = |
|
|
0,125D |
Перед установкой на вал маховик должен быть статически сбалансирован. После сборки маховик с валом рекомендуется подвергнуть динамической балансировке.
118
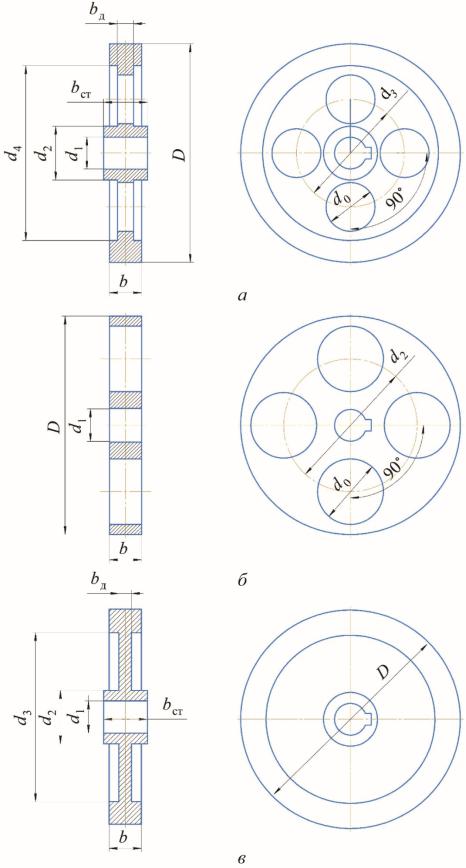
Рис. 5.9. Конструкции дисковых маховиков:
а – с четырьмя отверстиями и ободом, б – с четырьмя отверстиями, в – без отверстий
119