

книги / Теория механизмов и машин задания, упражнения и задачи к курсовому проекту
..pdfТаблица 3.1
Значение основных параметров зубчатого зацепления, мм
№ |
Параметр |
Расчетная |
Результат |
Масштабный |
Значение параметров |
|
п/п |
формула |
расчета, м |
коэф, м мм–1 |
на чертеже, мм |
||
|
||||||
1 |
Шаг |
P m |
0,0314 |
0,0004 |
78,5 |
|
зацепления |
||||||
|
|
|
|
|
2…
Таблица 3.2
Значения коэффициентов удельного скольжения 1 и 2
|
|
|
|
|
|
|
|
|
x |
|
5 |
10 |
… |
N, P |
… |
g–5 |
g |
1 |
|
. |
. |
… |
0 |
… |
. |
1 |
2 |
1 |
. |
. |
… |
0 |
… |
. |
|
4. Синтез кулачкового механизма
Исходные данные:
4.1.Построение кинематических диаграмм: перемещения, аналогов скорости и ускорения.
4.2.Построение совмещенного графика и определение базовых размеров кулачкового механизма.
4.3.Построение теоретического профиля кулачка и определение размеров ролика.
4.4.Построение практического профиля кулачка.
Примечание. Результаты определения углов давления должны быть приведены в табл. 4.1.
|
|
|
Таблица 4.1 |
|
|
Значения углов давления δ, град |
|
|
|
|
|
|
|
|
Положение |
Значение угла |
Положение |
Значение угла |
|
0 |
|
13 |
|
|
1 |
|
14 |
|
|
2 |
|
15 |
|
|
… |
|
… |
|
|
12 |
|
24 |
|
|
11
5. Определение момента инерции маховика и истинного закона движения ведущего звена
Исходные данные:
5.1.Определение приведенного момента сил полезных сопротивлений (или движущих сил).
5.2.Построение графика момента сил полезного сопротивления.
5.3.Построение графика работ сил полезного сопротивления и графика работ движущих сил.
5.4.Построение графика приращения кинетической энергии.
5.5.Определение кинетической энергии звеньев для 8–12 положений механизма (или приведенного момента инерции звеньев).
5.6.Определение момента инерции маховика, его конструкции и геометрических размеров.
5.7.Определение истинного закона движения ведущего звена с маховиком и без него.
Примечание. Результаты расчетов Mпс, Mд, Iп,VS1 ,VS2 ,VSn , S1 ,S2 Sn ,Tзв свести в табл. 5.1.
Таблица 5.1
Значения основных параметров для расчета маховика
Параметр |
|
Значения параметров в 12 положениях механизма |
|
||||||||
0 |
1 |
2 |
3 |
4 |
5 |
… |
12 |
||||
|
|
|
|||||||||
|
mi, кг |
|
|
|
|
|
|
|
|
||
VS |
, м с–1 |
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
|
|
|
|
|
||
V |
S2 |
, м с–1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
V |
… |
|
|
|
|
|
|
|
|
||
, м с–1 |
|
|
|
|
|
|
|
|
|||
|
Sn |
|
|
|
|
|
|
|
|
|
|
1, с–12 , с–1
…
n , с–1
Tзв , Дж
Iп , кг м2
M пс , Н м
12

3.3.Требования к оформлению чертежей проекта
1.Графическая часть проекта выполняется на листах формата А1 или А2
всоответствии с ГОСТ 2.301 68.
2.С левого края листа предусмотрено свободное поле в 20 мм. Рамка чертежа располагается на расстоянии 5 мм от внешней рамки.
3.Толщина контурных линий на чертежах должна быть в 2 раза толще
линий вспомогательных построений (ГОСТ 2.303 68).
4.При выполнении всех построений необходимо указать масштабные коэффициенты, например l = …м/мм.
5.На каждом листе проекта в правом нижнем углу должна быть основная надпись чертежа (рис. 2). Выполняется по ГОСТ 2.104-2006.
Рис. 2. Образец основной надписи листа курсового проекта
13
4. ПРИМЕРНЫЙ ПЕРЕЧЕНЬ ВОПРОСОВ, УПРАЖНЕНИЙ И ЗАДАЧ ДЛЯ ПОДГОТОВКИ К ЭКЗАМЕНУ И ЗАЩИТЕ КУРСОВОГО ПРОЕКТА
4.1. Первый лист проекта: структурный и кинематический анализ стержневого механизма
1.Назначение и особенность функционирования исследуемого рычажного механизма.
2.Задачи и порядок структурного анализа механизмов.
3.Цели и задачи кинематического исследования механизмов.
4.Методы кинематического анализа механизмов. Достоинства и недо-
статки.
5.Методика и последовательность графического исследования кинематики механизмов.
6.Кинематические диаграммы и их особенности.
7.Вычисление масштабных коэффициентов длин, скоростей, ускорений.
8.Кинематические передаточные функции и их размерности.
9.Связь между кинематическими характеристиками и передаточными функциями.
10.Последовательность решения задачи о положениях механизма.
11.Определение крайних положений механизма, рабочего и холостого хода исходя из описания его конструкции и работы.
12.Суть графоаналитического метода кинематического анализа механизма.
13.Понятие о планах скоростей и ускорений.
14.Особенности векторных уравнений для структурных групп при определении скоростей и ускорений характерных точек звеньев механизма (кинематические пары, центры тяжестей и т.п.).
15.Применение теоремы подобия при построении планов скоростей
иускорений.
16.Порядок определения величин и направлений угловой скорости
иуглового ускорения для звеньев механизма.
17.Как определяются величины и направления нормального, тангенциального и ускорения Кориолиса?
18.Проверка существования механизма по теореме Грассгофа.
19.Порядок и методика определения недостающих размеров рычажного механизма по заданной величине рабочего хода, коэффициенту скорости хода, координатам неподвижных точек.
14

20. Укажите класс кинематической пары, приведенной на рисунке:
21.Какой кинематической паре соответствует условное обозначение
(по ГОСТ 2.770-68*)?
22.Чему равно в данном механизме количество кинематических пар?
23. Определите число степеней свободы представленного механизма.
15
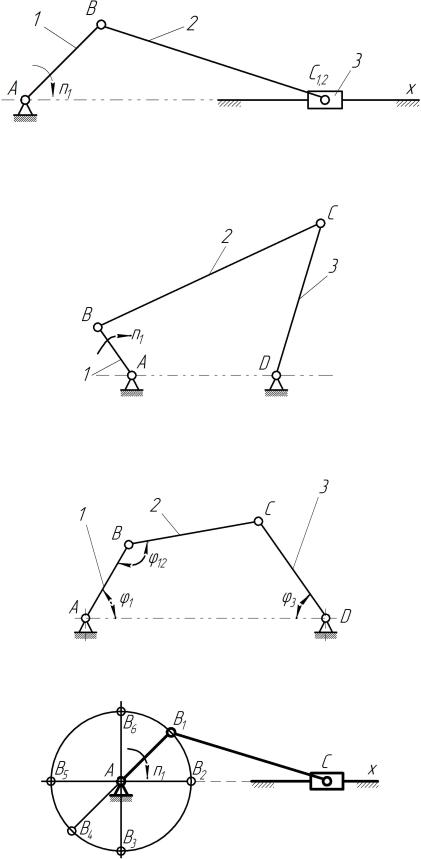
24.Запишите векторные уравнения для определения скорости точки С механизма:
25.Запишите формулу для определения нормального (центростремительного) ускорения точки C относительно точки B:
26. В шарнирном четырехзвенном механизме (1 – кривошип; 3 – коромысло) какие условия выполняются в крайних положениях?
27. Когда точка С ползуна будет занимать крайние положения?
16
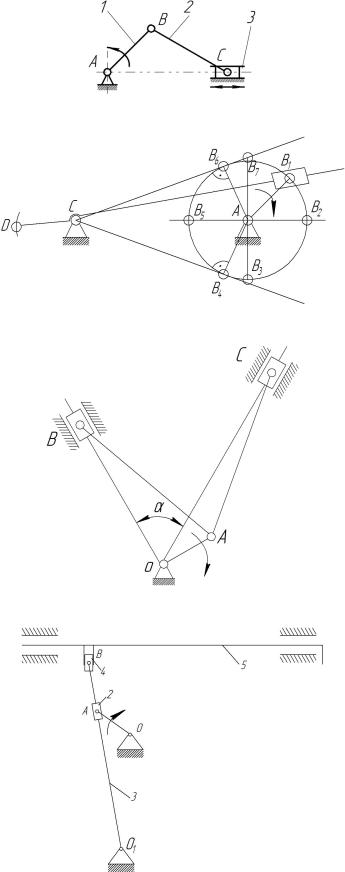
28.Чему равен ход ползуна 3 центрального кривошипно-ползунного механизма (lAB – длина кривошипа 1; lBC – длина шатуна 3)?
29.В каком случае точка D кулисы будет занимать крайние положения?
30. Когда точка В будет занимать крайние положения?
31. В каком случае точка B будет занимать крайние положения?
17

32.Запишите структурную формулу механизма:
33.Чему равно число степеней свободы механизма и количество структурных групп?
34. Укажите номер графика скорости точки:
18
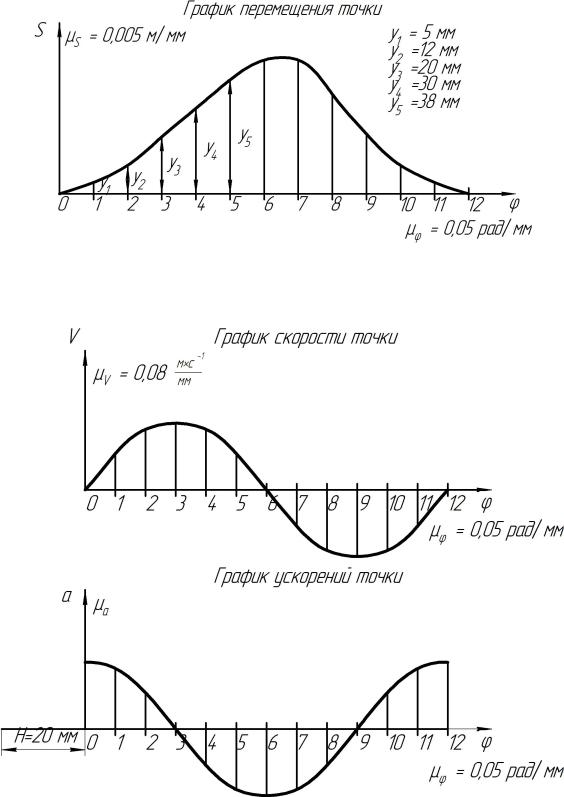
35. Значение перемещения точки поступательно движущегося звена из положения 2 в положение 5 равно?
36. Величина масштабного коэффициента графика ускорения точки при графическом дифференцировании методом хорд ( = 18 (1/с)) равна?
19
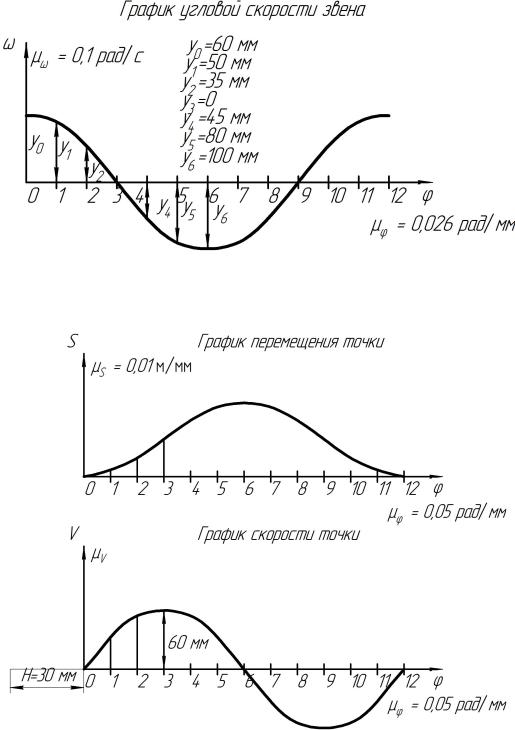
37. Разность между угловыми скоростями звена в первом и пятом положениях равна?
38. Величина скорости точки в третьем положении при = 20 1/с равна?
20