

книги / Проектирование и эксплуатация автоматизированных систем диспетчерского управления объектами критической инфраструктуры современного города
..pdfРис. 5.10. Алгоритм выработки правил для системы, принимающей решения по максимальной вероятности
131
выведены на пульт оператора. В системе здания присутствуют общие водонагреватели, насосы, а также регулятор температуры и связанный с ним датчик температуры. Поскольку температура и расход воды непосредственно связаны алгоритмом управления, контролировать показания водосчетчиков и датчиков температуры на этаже можно по показаниям общего датчика температуры и расхода воды.
Предположим, что может произойти отказ одного любого из датчиков 1, 2, 3 и 4 (чтобы не усложнять пример). Тогда при выявлении неполадок в системе горячего водоснабжения следует выбрать одну из четырех гипотез:
Н1 – неисправен водосчетчик 1; Н2 – неисправен датчик температуры 2; Н3 – неисправен водосчетчик 3;
Н4 – неисправен датчик температуры 4.
Опираться мы будем на следующую систему наблюдений:
Х1 – совпало ли показание датчика температуры 2 с показаниями общего датчика температуры, откорректированного по расходу воды?
Х2 – совпало ли показание датчика температуры 4 с показаниями общего датчика температуры, откорректированного по расходу воды?
Х3 – совпало ли показание водосчетчика 1 с показаниями общего датчика температуры, откорректированного по расходу воды?
Х4 – совпало ли показание водосчетчика 2 с показаниями общего датчика температуры, откорректированного по расходу воды?
Х5 – соответствуют ли показания водосчетчиков общему расходу воды в системе?
Значением наблюдения будет 1, если ответ на соответствующий вопрос утвердительный, и 0, если ответ отрицательный.
Эти 5 чисел (М = 5) и будут выступать как хiв формуле (4.7). Отно-
сительно коэффициентов biсложно что-либо сказать на начальном этапе обучения, поэтому их принимают равными нулю.
Проиллюстрируем данный алгоритм обучения на примере.
Пусть неисправен водосчетчик 1 (однако нам пока неизвестно, что имела место именно эта неисправность). Тогда (предположительно, а в процессе обучения реальной системы значения замеров будут известны точно)
Х1 = 0; Х2 = 1; Х3 = 0; Х4 = 1; Х5 = 1.
132
Вычисляем y для каждой гипотезы:
Н1: y1 = b11x1 + b21x2 + b31x3 + b41x4 + b51x5 = 0; Н2: y2 = b12x1 + b22x2 + b32x3 + b42x4 + b52x5 = 0; Н3: y3 = b13x1 + b23x2 + b33x3 + b43x4 + b53x5 = 0; Н4: y4 = b14x1+ b24x2 + b34x3 + b44x4+ b54x5 = 0.
Поскольку все y одинаковы, неисправность проклассифицировать нельзя. Поэтому ремонтной бригадой проводятся работы по обнаружению причины неисправности (и естественно, ее устранению). После этого мы узнаем, какая из гипотез оказалась правильной, и можем передать это знание экспертной системе. В соответствии с алгоритмом для той категории, в которую должен был попасть объект (категория Н1), проводится модификация коэффициентов b:
b11 = b11 + x1 = 0; b21 = b21 + x2 = 1;
b31 = b31 + x3 = 0; b41 = b41 + x4 = 1;
b51 = b51 + x5 = 1.
Для тех категорий, в которые объект не должен был попасть, но у которых yk больше, чем y правильной категории или равен ему (в данном случае это категории Н2, Н3 и Н4), проводится другая модификация коэффициентов b.
Для категории Н2: b12 = b12 – x1 = 0; b22 = b22 – x2 = –1; b32 = b32 – x3 = 0;
b42 = b42 – x4 = –1; b52 = b52 – x5 = –1.
Для категории Н3: b13 = b13 – x1 = 0; b23 = b23 – x2 = –1; b33 = b33 – x3 = 0;
b43 = b43 – x4 = –1; b53 = b53 – x5 = –1.
Для категории Н4: b14 = b14 – x1 = 0; b24 = b24 – x2 = –1; b34 = b34 – x3 = 0;
b44 = b44 – x4 = –1; b54 = b54 – x5 = –1.
Первый шаг закончен.
Возникла очередная неисправность – начался второй шаг обучения. Снова вычисляем y для каждой гипотезы с новыми коэффициентами. Пусть на этот раз неисправен датчик температуры 2. Тогда результаты наблюдений будут (предположительно) следующими:
Х1 = 0; Х2 = 1; Х3 = 0; Х4 = 1; Х5 = 0.
Для Н1 y1 = 0 0 + 1 1 + 0 0 + 1 1 + 1 0 = 2;
Для Н2 y2 = 0 0 + (–1) 1 + 0 0 + (–1) 1 + (–1) 0 = –2; Для Н3 y3 = 0 0 + (–1) 1 + 0 0 + (–1) 1 + (–1) 0 = –2; Для Н4 y4 = 0 0 + (–1) 1 + 0 0 + (–1) 1 + (–1) 0 = –2.
133
Получено максимальное значение y для гипотезы Н1, а должно быть – для гипотезы Н2. Объект снова не попал в нужную категорию, и модификацию коэффициентов приходится повторить.
Для категории Н2: b12 = b12 + x1 = 0 + 0 = 0; b22 = b22 + x2 = (–1) + 1 = 0; b32 = b32 + x3 = 0 + 0 = 0; b42 = b42 + x4 = (–1) + 1 = 0; b52 = b52 + x5 = (–1) + 0 = –1.
Для категории Н1: b11 = b11– x1 = 0 – 0 = 0; b21 = b21 – x2 = 1 – 1 = 0; b31 = b31 – x3 = 0 – 0 = 0; b41 = b41 – x4 = 1 – 1 = 0; b51 = b51 – x5 = 1 – 0 = 1.
Для категории Н3: b13 = b13 – x1 = 0 – 0 = 0; b23 = b23 – x2 = (–1) –1 = –2; b33 = b33 – x3 = 0 – 0 = 0; b43 = b43 – x4 = (–1) – 1 = –2; b53 = b53 – x5 = (–1) – 0 = –1.
Для категории Н4: b14 = b14 – x1 = 0 – 0 = 0; b24 = b24 – x2 = (–1) –1 = –2; b34 = b34 – x3 = 0 – 0 = 0; b44 = b44 – x4 = (–1) – 1 = –2; b54 = b54 – x5 = (–1) – 0 = –1;
Второй шаг окончен.
Теперь сделаем третий шаг. Очередная неисправность снова оказалась неисправностью водосчетчика 1. В этомслучае, как ужеупоминалось,
Х1 = 0; Х2 = 1; Х3 = 0; Х4 = 1; Х5 = 1.
Подсчитаем значения y для всех гипотез, используя последние модификации коэффициентов b.
Для Н1: y1 = 0 0 + 0 1 + 0 0 + 0 1 + 1 1 = 1; Для Н2: y2 = 0 0 + 0 1 + 0 0 + 0 1 + (–1) 1 = –1;
Для Н3: y3 = 0 0 + (–2) 1 + 0 0 + (–2) 1 + (–1) 1 = –5; Для Н4: y4 = 0 0 + (–2) 1 + 0 0 + (–2) 1 + (–1) 1 = –5.
Наибольшее значение y1 указывает на гипотезу Н1, что является правильным результатом. Поэтому модификация коэффициентов не проводится.
Пусть для нашей экспертной системы заданная вероятность правильного ответа – 0,7 с 90%-ным доверительным интервалом. Предположим, что мы провели 100 шагов обучения. Подсчитаем, с какой вероятностью мы можем доверять решениям экспертной системы. Пусть экспертная система дала правильный ответ в 78 случаях из 100. Тогда p* = 0,78. Определим 90%-ный доверительный интервал для вероятности правильного ответа экспертной системы. Просчитаем по формулам
(4.11), (4.12) (поскольку n = 100) p1 и p2:
p1 = 0,705; p2 = 0,840; Iβ = (0,705; 0,840).
134
Таким образом, с вероятностью 0,9 вероятность правильного ответа экспертной системы будет находиться в границах от 0,705 до 0,840. Пусть для нашей экспертной системы заданная вероятность правильного ответа – 0,7. Следовательно, на данном шаге обучение может быть закончено.
Получим нечеткое множество неисправностей для текущего шага работы экспертной системы, где коэффициенты принадлежности определяют вероятность появления данной гипотезы. Фактически нам надо для каждой гипотезы определить ее коэффициент принадлежности:
1. На данном шаге были получены следующие значения: Н1 = 1;
Н2 = –1; Н3 = –5; Н4 = –5.
2.Складываем полученные значения с Нmin. Получаем следующие коэффициенты: Н1 = 6; Н2 = 4; Н3 = 0; Н4 = 0.
3.Затем делим эти коэффициенты на их общую сумму. В данном
случае ∑ Hi = 10.
Следовательно, получим вероятности появления каждой гипотезы на текущем шаге, т.е. коэффициенты принадлежности каждой гипотезы к множеству возможных неисправностей АСУ ТП:
p1 = 0,6; p2 = 0,4; p3 = 0; p4 = 0.
Тогда нечеткое множество гипотез о возможных неисправностях АСУ ТП для диагностики системы будет выглядеть следующим образом:
N = {(Н1/0,6), (Н2/0,4), (Н3/0), (Н4/0)},
т.е. гипотеза Н1 имеет место с вероятностью 0,6; гипотеза Н2 – с вероятностью 0,4; гипотеза Н3 – с вероятностью 0; гипотеза Н4 также с вероятностью 0.
5.5. СИСТЕМА, ПРИНИМАЮЩАЯ РЕШЕНИЯ ПО НАИМЕНЬШЕМУ РАССТОЯНИЮ
Такая система работает не по признакам типа «да – нет», а по конкретным значениям измеренных параметров. При этом не исключено и наличие логических параметров «да – нет», которые, как и в предыдущем случае, заменяют на числовое значение 1 (0).
135
Рассмотрение данного варианта экспертной системы будем вести на том же примере. Тогда параметры, подлежащие замеру, будут выглядеть следующим образом:
Х1 – разность между показанием датчика температуры 2 и показаниями общего датчика температуры, откорректированного по расходу воды;
Х2 – разность между показанием датчика температуры 4 и показаниями общего датчика температуры, откорректированного по расходу воды;
Х3 – разность между показанием водосчетчика 1 и показаниями общего датчика температуры, откорректированного по расходу воды;
Х4 – разность между показанием водосчетчика 2 и показаниями общего датчика температуры, откорректированного по расходу воды;
Х5 – разность между показаниями водосчетчиков и общим расходом воды в системе.
Гипотезы Н1 – Н4 остаются теми же самыми. Напомним алгоритм выработки правил (рис. 5.11).
Привяжем этот алгоритм к рассматриваемой АСУ ТП. Исходя из опыта эксплуатации систем подобного рода, раздаются начальные значения Хki для всех N гипотез по всем М параметрам, которые и принимаются на первом этапе за средние (Midki), минимальные (xki min) и максимальные (xki max) значения.
Проводим очередной шаг обучения. Пусть АСУ ТП отказала. Имеем набор показаний {Х} . Вычисляем расстояния D для всех гипотез:
М |
|
M d |
− x |
|
|
|
|
|
; |
(5.17) |
|||||
|
|
||||||||||||||
для Н1: D1 = ∑ |
|
i i1 |
i |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i=1 |
xi max1 − xi min1 |
|
|
|
|
||||||||||
М |
|
Mi di 2 |
− xi |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
||||||||
для Н2: D2 = ∑ |
|
|
|
|
|
|
; |
(5.18) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
xi max 2 − xi min 2 |
|||||||||||||
i=1 |
|
|
|
||||||||||||
М |
|
M i di3 |
− xi |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|||||||||
для Н3: D3 = ∑ |
|
|
|
; |
(5.19) |
||||||||||
|
|
|
|
|
|
|
|
|
|||||||
xi max 3 − xi min 3 |
|||||||||||||||
i=1 |
|
|
|
||||||||||||
М |
|
Mi di 4 |
− xi |
|
|
|
|
|
|||||||
|
|
|
|
|
|
||||||||||
для Н4: D4 = ∑ |
|
|
|
|
. |
(5.20) |
|||||||||
|
xi max 4 − xi min 4 |
|
|||||||||||||
i=1 |
|
|
|
||||||||||||
136
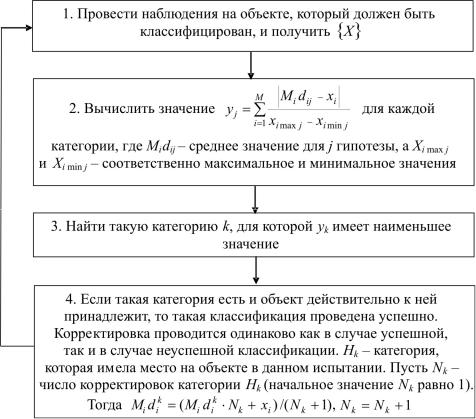
Рис. 5.11. Алгоритм выработки правил для системы, принимающей решения по наименьшему расстоянию
Нормализация, т.е. деление на максимальный разброс значений, производится для устранения большего влияния бόльших по величине параметров.
После расчетов выбирают гипотезу с наименьшим Dk. Ремонтная бригада приступает к диагностике состояния АСУ ТП и устранению неисправностей, после чего становится известно, была выбрана правильная гипотеза или нет. Какая бы ни была выбрана гипотеза, правильная или неправильная, для гипотезы, соответствующей имевшему место событию, проводится следующая корректировка параметров.
Пусть Nk – число корректировок гипотезы Нk (начальное значение Nk равно 1). Тогда M i dik = (M i dik Nk + xi ) / (Nk + 1) , Nk = Nk + 1 .
Рассмотрим вышеприведенный алгоритм на примере.
137
Пусть средние значения на очередном шаге распределились следующим образом:
Н1 – неисправен водосчетчик 1.
M |
d1 |
= 5 %; |
x1 |
= 2 %; |
x1 |
= 10 %; |
i |
1 |
|
1min |
|
1max |
|
M |
d1 |
= 0,5 %; |
x1 |
= 0 %; |
x1 |
= 1 %; |
i |
2 |
|
2 min |
|
2max |
|
M |
d1 |
= 3 %; |
x1 |
= 2 %; |
x1 |
= 5 %; |
i |
3 |
|
3min |
|
3max |
|
M |
d1 |
= 0 %; |
x1 |
= 0 %; |
x1 |
= 1 %; |
i |
4 |
|
4 min |
|
4max |
|
M |
d1 |
= 0,6 %; |
x1 |
= 0 %; |
x1 |
= 1 %. |
i |
5 |
|
5min |
|
5 max |
|
Н2 – неисправен датчик температуры 2.
M |
i |
d 2 |
= 5 %; |
x2 |
= 2 %; |
x2 |
= 10 %; |
|
1 |
|
1min |
|
1max |
|
|
M |
i |
d 2 |
=0,5 %; |
x2 |
= 0 %; |
x2 |
= 1 %; |
|
2 |
|
2 min |
|
2max |
|
|
M |
i |
d 2 |
=3 %; |
x2 |
= 2,5 %; |
x2 |
= 5 %; |
|
3 |
|
3min |
|
3max |
|
|
M |
i |
d 2 |
= 0 %; |
x2 |
= 0 %; |
x2 |
= 1 %; |
|
4 |
|
4 min |
|
4max |
|
|
M |
i |
d 2 |
= 4 %; |
x2 |
= 3 %; |
x2 |
= 7 %. |
|
5 |
|
5 min |
|
5 max |
|
|
Н3 – неисправен водосчетчик 3. |
|
||||||
M |
i |
d 3 |
= 0,5 %; |
x3 |
= 0 %; |
x3 |
= 1 %; |
|
1 |
|
1min |
|
1max |
|
|
M |
i |
d 3 |
= 5 %; |
x3 |
= 2 %; |
x3 |
= 10 %; |
|
2 |
|
2 min |
|
2max |
|
|
M |
i |
d 3 |
= 0 %; |
x3 |
= 0 %; |
x3 |
= 1 %; |
|
3 |
|
3min |
|
3max |
|
|
M |
i |
d 3 |
= 3 %; |
x3 |
= 2 %; |
x3 |
= 5 %; |
|
4 |
|
4 min |
|
4max |
|
|
M |
i |
d 3 |
= 0,6 %; |
x3 |
= 0 %; |
x3 |
=1 %. |
|
5 |
|
5 min |
|
5max |
|
|
Н4 – неисправен датчик температуры 4.
M |
d 4 |
= 0,5 %; |
x4 |
= 0 %; |
x4 |
= 1 %; |
i |
1 |
|
1min |
|
1max |
|
M |
d 4 |
= 5 %; |
x4 |
= 2 %; |
x4 |
= 10 %; |
i |
2 |
|
2 min |
|
2max |
|
M |
d 4 |
= 0; |
x4 |
= 0 %; |
x4 |
= 1 %; |
i |
3 |
|
3min |
|
3max |
|
M |
d 4 |
= 3 %; |
x4 |
= 2 %; |
x4 |
= 5 %; |
i |
4 |
|
4 min |
|
4max |
|
M |
d 4 |
= 4 %; |
x4 |
= 2 %; |
x4 |
= 6 %. |
i |
5 |
|
5 min |
|
5 max |
|
138
Предположим, что при очередной неисправности в работе АСУ ТП мы получили следующие замеры: Х1 = 4 %, Х2 = 0,2 %, Х3 = 4 %,
Х4 = 0,1 %, Х5 = 2 %.
Просчитаем расстояния D для всех четырех гипотез.
Для Н1: D1 |
= |
|
|
5 − 4 |
|
|
+ |
|
0, 5 − 0, 2 |
|
+ |
|
4 − 3 |
|
|
+ |
|
|
0 − 0,1 |
|
|
+ |
|
|
|
|
|
0, 6 − 2 |
|
|
= |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
8 |
|
|
1 |
|
|
3 |
|
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
= 0,125 + 0,3 + 0,33 + 0,1 + 1,4 = 2,225. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
Для Н2: D2 |
= |
|
|
5 − 4 |
|
|
|
|
|
0, 5 − 0, 2 |
|
+ |
|
|
|
|
|
4 − 3 |
|
|
|
|
|
+ |
|
|
0 − 0,1 |
|
|
|
|
+ |
|
|
|
|
|
4 − 2 |
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
8 |
|
|
1 |
|
2, 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
= 0,125 + 0,3 + 0,4 + 0,1 + 0,5 = 1,425. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
Для Н3: D3 |
= |
|
|
4 − 0, 5 |
|
+ |
|
5 − 0, 2 |
|
+ |
|
|
|
|
|
4 − 0 |
|
|
+ |
|
|
|
|
3 − 0,1 |
|
|
+ |
|
|
|
|
|
2 − 0, 6 |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|||||||||||||||||||
1 |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
= 3,5 + 0,6 + 4 + 0,96 + 1,4 = 10,46. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
Для Н4: D4 |
= |
|
|
4 − 0, 5 |
|
+ |
|
5 − 0, 2 |
|
+ |
|
|
|
|
|
4 − 0 |
|
|
+ |
|
|
|
|
3 − 0,1 |
|
|
+ |
|
|
|
|
|
4 − 2 |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
8 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
= 3,5 + 0,6 + 4 + 0,96 + 0,5 = 9,56.
По минимальному D2 выбираем гипотезу Н2 – неисправность датчика температуры 2. После того как поработала бригада ремонтников, возможны 2 исхода:
1.Гипотеза Н2 подтвердилась.
2.Гипотеза Н2 не подтвердилась.
Рассмотрим первый вариант. Пусть N2 = 10. Гипотеза Н2 подтвердилась, следовательно, корректируем значения Mi di2 , xi2min и xi2max .
M i d12 = ( M i d12 10 + x1) / (10 + 1) = (5 10 + 4) / 11 = 4,93 %;
M i d22 = (0,5 10 + 0,2) / 11 = 0,49 %;
M i d32 = (3 10 + 4) / 11 = 3,09 %;
M i d42 = (0 10 + 0,1) / 11 = 0,009 %;
Mi d52 = (4 10 + 2) / 11 = 3,86 %;
xi2min и xi2max остаются прежними, так как xi попадает в существующий промежуток, кроме x5;
x52min = 2 %; N2 = N2 + 1 = 11.
139
Рассмотрим второй вариант. Гипотеза Н2 не подтвердилась. В реальности отказал водосчетчик 1, т.е. имела место гипотеза Н1. Пусть N1= 10, как и в предыдущем случае.
Корректируем значения Mi di1 , xi1min и xi1max .
M i d11 = (5 10 + 4) / 11 = 4,93 %;
M i d21 = (0,5 10 + 0,2) / 11 = 0,49 %;
M i d31 = (3 10 + 4) / 11 = 3,09 %;
M i d41 = (0 10 + 0,1) / 11 = 0,009 %;
M i d51 = (0,6 10 + 2) / 11 = 0,73 %;
x51max = 2 %; N1= N1+ 1 = 11.
Получим нечеткое множество неисправностей для текущего шага работы экспертной системы, где коэффициенты принадлежности, как и в предыдущем случае, определяют вероятность появления данной гипотезы.
На данном шаге были получены следующие значения:
Н1 = 2,225; Н2 = 1,425; Н3 = 10,46; Н4 = 9,56.
Далее делим значения для гипотез на сумму значений гипотез по формуле
Hi |
= |
|
Hi |
. |
|
(5.21) |
||
|
∑ Hi |
|
||||||
|
|
|
|
|
|
|||
Н1 = 0,09; Н2 = 0,057; Н3 = 0,426; Н4 = 0,389. |
|
|||||||
После этого преобразуем полученные значения по формуле |
|
|||||||
p = |
|
1− Hi |
|
. |
(5.22) |
|||
∑(1 |
− Hi ) |
|||||||
i |
|
|
||||||
|
|
|
||||||
Получим следующие вероятности: p1 = 0,3; p2 = 0,31; p3 = 0,189;
p4 = 0,201.
Тогда нечеткое множество для диагностики системы будет выглядеть следующим образом:
N = {(H1 / 0, 3), (H 2 / 0.31), (H3 / 0,189), (H 4 / 0, 201)} ,
140