

книги / Строительная механика машин
..pdfU = |
π4 Dab |
∞ |
∞ 2 |
m2 |
+ |
n2 |
2 |
||||
|
8 |
∑ ∑ amn |
a2 |
b2 |
|
, |
|||||
|
|
m=1 n=1 |
|
|
|
|
|||||
|
|
Nкр |
|
ab ∞ ∞ |
|
2 |
m2π2 |
|
|
||
W = |
|
|
|
∑ ∑ amn |
a2 |
, |
|
||||
2 |
4 |
|
|||||||||
|
|
|
m=1 n=1 |
|
|
|
|||||
где Nкр – критическое усилие, наименьшее из значений Nх. Из основного уравнения (U = W ) найдем:
|
|
∞ ∞ |
|
2 |
|
2 |
2 |
|
|
|
|
∑ ∑ amn2 |
m2 |
+ n2 |
|
|
|
||
2 |
|
m=1 n=1 |
|
a |
|
b |
|
|
|
Nкр = π |
D |
|
|
|
|
|
|
. |
(2.28) |
∞ ∞ |
|
|
m |
2 |
|
||||
|
|
∑ ∑ amn2 |
|
|
|
|
|||
|
|
m=1 n=1 |
|
a2 |
|
|
|
||
Коэффициенты amn должны быть выбраны так, чтобы Νкр было
минимальным. Из формулы (2.28) видно, что все члены, кроме одного, нужно положить равными нулю. Таким способом получим:
|
|
m2 |
+ n2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
a |
|
b |
|
2 |
m |
|
a |
|
|
||
Νкp = π |
D |
|
|
|
|
= π |
D |
|
+ |
|
|
. |
|
m |
2 |
|
a |
2 |
|
||||||||
|
|
|
|
|
|
|
b |
m |
|
||||
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
|
Это значение критического усилия получается и при использовании метода рядов для интегрирования дифференциального уравнения сложного изгиба прямоугольной пластинки.
Выпучивание пластинки при устойчивости происходит по поверхности, описываемой выражением
w(x, y) = amn sin maπx sin nbπy .
2.3.6. Применение метода Бубнова – Галеркина для расчета пологих оболочек
У пологих оболочек стрела подъема не превышает 1/5 наименьшего линейного размера в плане. Теория расчета пологих оболочек создана В.З. Власовым и основывается на следующих гипотезах:
51

1)оболочка принимается настолько пологой, что геометрию ее поверхности считают совпадающей с геометрией ее проекции;
2)пренебрегают членами, содержащими в качестве коэффициентов кривизны и их производные.
Дифференциальные уравнения, описывающие поведение пологих оболочек, имеют следующий вид [4]:
Eh1 ∆∆ϕ−∆2k w = 0,
∆2k ϕ+ D∆∆w = p,
здесь ϕ – функция напряжений; w – функция прогибов;
∆∆ = ∂∂x44 + 2 ∂x∂2∂4y2 + ∂∂y44 ;
∆k2 = |
∂ |
|
χ2 |
∂ |
|
+ |
∂ |
|
χ1 |
∂ |
|
, |
|
|
|
|
|||||||||
|
∂x |
|
∂x |
|
∂y |
|
∂y |
|
||||
χ1, χ2 – кривизны срединной поверхности оболочки в направлении координатных линий х и у соответственно; h – толщина оболочки; р – поперечная нагрузка, распределенная по поверхности пластинки.
Рассмотрим применение метода Бубнова – Галеркина в форме, разработанной для пологих оболочек В.З. Власовым.
Функцию напряжений и функцию прогибов представляют в форме рядов:
∞ ∞ |
∞ ∞ |
|
|
ϕ(x, y) = ∑ ∑ amnϕmn |
(x, y) = ∑ ∑ amn Xm (x) Yn ( y), |
|
|
m=1 n=1 |
m=1 n=1 |
(2.29) |
|
∞ ∞ |
∞ ∞ |
||
|
|||
w(x, y) = ∑ ∑ bmn wmn |
(x, y) = ∑ ∑ bmnUm (x) Vn ( y), |
|
|
m=1 n=1 |
m=1 n=1 |
|
|
где Xm (x), Yn ( y), Um (x), Vn ( y) – базисные функции. |
|
||
Внешнюю нагрузку также представляют в форме ряда |
|
||
∞ |
∞ |
|
|
p(x, y) = ∑ ∑ cmnUm (x) Vn ( y). |
(2.30) |
||
52
При известной функции нагрузки определяются коэффициенты ряда cmn .
Функции Xm(x), Yn(y), Um(x), Vn(y) выбираются так, чтобы ϕmn и wmn удовлетворяли всем граничным условиям. Эти функции можно представить в виде линейных комбинаций фундаментальных балочных функций, заведомо удовлетворяющих граничным условиям
задачи. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Постоянные amn |
|
и bmn определяются из системы уравнений: |
|||||||||||||
|
|
|
|
a b |
|
1 |
|
|
|
|
|
|
|
||
|
|
|
|
∫∫ |
|
|
|
|
|
∆∆ϕ−∆k ϕ |
ϕmndxdy = |
0, |
|
|
|
|
|
|
|
|
Eh |
|
|
||||||||
|
|
|
|
0 0 |
|
|
|
|
|
|
|
(2.31) |
|||
|
|
|
|
a b |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( |
∆ |
k |
ϕ+ D∆∆w − p)w dxdy |
= 0, |
|
|
|
||||
|
|
|
|
∫∫ |
|
|
|
|
|
mn |
|
|
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
где a , |
b – размер оболочки в плане. |
|
|
|
|
||||||||||
Вариационные уравнения (2.31) после подстановки рядов (2.29) |
|||||||||||||||
и (2.30) примут вид: |
|
|
|
|
|
|
|
|
|
|
|
||||
a b |
|
|
1 |
∞ ∞ |
|
|
|
|
|
∞ ∞ |
|
|
|
|
|
∫∫ |
|
|
|
∑ ∑ amn |
∆∆ϕmn − ∑ ∑ bmn∆k wmn ϕmndxdy = 0, |
|
|
||||||||
|
|
|
|||||||||||||
0 0 |
|
Εh m=1 n=1 |
|
|
|
|
|
m=1 n=1 |
|
|
|
|
|
||
a b |
|
|
∞ |
∞ |
|
|
|
|
|
∞ ∞ |
|
|
|
|
|
∫∫ |
∑ ∑ amn∆k ϕmn + ∑ ∑ bmn∆∆wmn wmndxdy = |
|
(2.32) |
||||||||||||
0 0 |
m=1 n=1 |
|
|
|
|
|
m=1 n=1 |
|
|
|
|
|
|||
a b |
∞ |
∞ |
|
|
|
|
|
|
|
|
|
|
|
||
= ∫∫ |
∑ ∑ cmn pmn wmndxdy. |
|
|
|
|
|
|||||||||
0 0 m=1 n=1 |
|
|
|
|
|
|
|
|
|
|
|
||||
Поскольку фундаментальные |
балочные |
функции, их |
вторые |
||||||||||||
и четвертые производные обладают свойством ортогональности, то в системе уравнений (2.32) исчезнут все коэффициенты, имеющие разные индексы. Для определения каждого коэффициента остается по два уравнения следующего вида:
amnδmn −bmnδ′mn = 0, |
|
|
(2.33) |
|||
a r′ |
+b r |
= ∆ |
|
. |
||
mn mn |
mn mn |
|
mn |
|
|
|
53
Входящие в эти уравнения коэффициенты определяются такими выражениями:
|
|
|
|
|
|
|
a b |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δmn = ∫∫ |
|
|
|
∆∆ϕmn ϕmndxdy = |
|
|||||
|
|
|
|
|
|
|
Eh |
|
|||||||||
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
|
|
||
|
= |
|
1 |
|
a b |
(Xm(IV)Yn |
+ 2Xm′′Yn′′+ XmYn(IV) )XmYndxdy, |
||||||||||
|
|
|
∫∫ |
||||||||||||||
|
Eh |
||||||||||||||||
|
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
a b |
|
|
|
|
|
|
|
a b |
(χ1UmVn′′+χ2Um′′Vn ) XmYndxdy, |
|||||||
δ′mn = ∫∫ |
∆k wmnϕmndxdy = |
∫∫ |
|||||||||||||||
|
0 0 |
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
||
r′ |
= a b |
∆ |
ϕ |
|
w dxdy = a b |
(χ X |
Y ′′+χ |
2 |
X ′′Y |
)U V dxdy, |
|||||||
mn |
∫∫ |
k |
|
mn mn |
|
|
∫∫ |
1 |
m n |
|
m n |
m n |
|||||
|
0 0 |
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
||
a b |
|
|
|
|
|
|
|
|
a b |
(Um(IV)Vn + 2Um′′Vn′′+UmVn(IV) )UmVndxdy, |
|||||||
rmn = ∫∫ D∆∆wmn wmndxdy = D∫∫ |
|||||||||||||||||
0 0 |
|
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a b |
|
|
|
|
|
a b |
(x)Vn2 |
( y)dxdy. |
||
|
∆mn = cmn ∫∫ pmn wmndxdy = cmn ∫∫Um2 |
||||||||||||||||
|
|
|
|
|
|
|
0 0 |
|
|
|
|
|
0 0 |
|
|
|
|
Решая систему уравнений (2.33) для каждой пары значений m и n, находим:
amn = |
|
|
∆mnδ′mn |
|
, |
||
|
δ |
r |
+δ′ |
r′ |
|||
|
|
|
mn mn |
mn mn |
|||
bmn = |
|
∆mnδmn |
|
|
. |
||
δ |
r |
+δ′ |
r′ |
||||
|
|
|
mn mn |
mn mn |
|||
При известных функциях напряжений ϕ и прогибов w рассчитывается напряженно-деформированное состояние пологой оболочки.
2.3.7. Применение метода Ритца – Тимошенко для расчета гибких пластин
В настоящее время достаточно развита теория расчета жестких пластин, для которых характерна линейная зависимость прогибов от действия поперечной нагрузки. При этом основную роль играют напряжения от изгибающих и крутящего моментов, а потенциальная
54
энергия пластинки определяется соотношениями (2.6), (2.7). Однако с увеличением нагрузки и, соответственно, прогибов возрастает роль мембранных усилий, которые не учитываются в классической теории пластин [3–6].
Потенциальная энергия изгиба пластинки в декартовой системе координат имеет следующий вид [1, 3]:
UM = |
1 |
∫∫(M xθx + M yθy + 2M xyθxy )dxdy, |
(2.34) |
|
2 |
S |
|
где M x , M y , M xy – действующие в пластинке изгибающие и крутящий моменты; θx , θy , θxy – соответствующие кривизны срединной
поверхности пластинки.
С учетом принятых в теории пластин уравнений соотношение (2.34) для прямоугольной пластинки записывается в следующем виде:
|
|
D |
|
|
∂ |
2 |
w2 |
|
2 |
|
∂ |
2 |
w2 |
|
2 |
∂ |
2 |
w2 |
∂ |
2 |
w2 + |
||
|
|
|
|
||||||||||||||||||||
UM |
= |
∫∫ |
|
+ |
|
|
+ 2µ |
|
|
||||||||||||||
|
|
2 |
S |
∂x |
|
|
|
∂y |
|
|
|
∂x |
∂y |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂ |
2 |
w |
|
2 |
|
|
|
|
|
|
|||
|
|
|
+ 2(1−µ) |
|
|
|
dxdy, |
|
|
|
|
(2.35) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
∂x∂y |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где D – цилиндрическая жесткость пластинки (см. формулу (1.4)); Ε, µ – модуль упругости и коэффициент Пуассона материала соответственно; h – толщина пластинки; w(x, y) – прогиб пластинки.
Аналогично для круглой пластинки при симметричном относительно оси нагружении потенциальная энергия деформации изгиба определяется интегралом:
|
|
D |
|
∂2 w 2 |
1 |
∂w 2 |
2µ ∂w ∂2 w |
|
||||||||
UM |
= |
|
∫∫ |
|
|
|
+ |
|
|
|
|
+ |
r ∂r ∂r |
|
rdrdθ, |
(2.36) |
2 |
∂r |
2 |
r |
2 |
2 |
|||||||||||
|
|
S |
|
|
|
|
|
∂r |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где w(r ) – функция прогибов пластинки; r – радиальная координата.
55
Решения задач изгиба жестких пластин основаны на минимуме полной энергии системы с использованием уравнений (2.35) и (2.36) для прямоугольной и круглой пластинок соответственно. При действии на пластинку поперечной нагрузки и увеличении прогибов в пластинке возникают мембранные усилия, которым соответствует потенциальная энергия, определяемая в декартовой системе координат в виде:
UN = 1 ∫∫(Nxεx + Nyεy + 2Nxy γxy )dxdy,
2 S
где Nx , Ny , Nxy – мембранные усилия в прямоугольной пластинке; εx ,ε y, γxy – вызванные ими относительные деформации; или в виде
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
Eh |
|
|
∂ |
|
w |
|
|
|
∂ w |
|
|
|
|||||||
UN = |
|
∫∫ |
|
|
|
|
+ |
|
|
|
+ |
||||||||||
|
|
∂x2 |
|
∂y2 |
|
||||||||||||||||
8 |
(1−µ2 ) S |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂w |
2 |
|
∂w |
|
2 |
|
|
|
|
|
|
|||||||
+ |
|
|
|
|
|
|
|
|
(2.37) |
||||||||||||
2(1−µ) |
|
|
|
|
|
∂y |
|
|
dxdy. |
|
|
||||||||||
|
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Доля потенциальной энергии мембранных усилий в круглой пластинке определяется следующим образом:
UN = 1 ∫∫(Nr εr + Nt εt )rdrdθ, 2 S
где εr ,εt – деформации в радиальном и окружном (тангенциальном)
направлениях соответственно; |
Nr , Nt – мембранные усилия в круг- |
||||||||||
лой пластинке; или так: |
|
|
|
|
|
|
|
|
|
||
|
|
Eh |
∂u 2 |
|
∂w 2 |
∂u |
|
∂2 w 2 |
u |
|
|
UN = |
|
|
∫∫ |
|
+ |
|
∂r |
+ |
µ |
r |
+ |
|
|
||||||||||
2 |
(1−µ2 ) S ∂r |
|
|
∂r |
|
∂r2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
56
+2µ |
u ∂u |
u 2 |
1 |
∂w 4 |
(2.38) |
||||
r ∂r |
+ |
|
+ |
|
|
|
rdrdθ, |
||
|
r |
|
4 |
|
∂r |
|
|
||
|
|
|
|
|
|
|
|
|
|
где u – перемещение в радиальном направлении.
Если не учитывать радиальные перемещения, то выражение (2.38) существенно упрощается:
|
|
Eh |
|
∂w 4 |
|
UN = |
|
|
∫∫ |
|
r dr dθ. |
|
|
||||
8 |
(1−µ2 ) S |
∂r |
|
||
Составляющие потенциальной энергии (2.35), (2.37) для прямоугольных пластинок и (2.36), (2.38) для круглых пластинок образуют с потенциалом нагрузки функционал полной энергии, учитывающий и моменты и мембранные усилия, который может быть использован для расчета гибких пластин вариационными методами.
Пример 4. Рассмотрим поведение круглой пластинки радиусом r=а, защемленной по контуру, под действием равномерно распределенной нагрузки интенсивностью p0 .
Функцию прогибов задаем в виде
w(r ) = a1 (a2 −r2 )2 , |
(2.39) |
удовлетворяющем граничным условиям и условию симметрии деформирования:
w |
|
r=a |
= 0; dw |
|
|
= 0; dw |
|
= 0. |
|
|
|
|
|||||
|
|
dr |
|
r=0 |
dr |
|
r=a |
|
|
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
Решение (2.39) выбрано в виде, аналогичном известному точному решению данной задачи для жесткой пластинки [1], но включает неизвестный параметр a1, который определяется из условия
минимума полной энергии пластинки.
Функцию перемещений в радиальном направлении примем в виде
57

u (r ) = a2 (a −r ) . |
(2.40) |
Полагаем, что из условий симметрии деформирования u r=0 = 0 ,
в защемлении u r=a = 0 , а параметр a2 также определяем из решения
вариационной задачи. Подставляя выражения (2.39) и (2.40) в соотношения (2.36) и (2.38), получим зависимости для определения потенциальной энергии деформации изгиба и потенциальной энергии мембранных усилий круглой пластинки:
UM = 323 πD a12a6 ,
|
|
πEh 1 |
2 |
4 |
2 |
9 |
|
82 |
|
46 |
|
32 |
4 14 |
|
||||||
UN = |
|
|
|
|
|
|
a2 a |
|
+ a1 a2a |
|
|
|
µ− |
|
|
+ |
|
|
a1 a |
. |
1 |
−µ |
2 |
4 |
|
|
315 |
315 |
105 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Работу внешней распределенной нагрузки вычисляем интегралом:
Aн = ∫∫ p0 wrdrdθ = |
1 |
πp0a1a6 . |
S |
3 |
|
Таким образом, с учетом потенциальной энергии мембранных напряжений полная энергия Э для гибких пластин определяется по формуле
Э =UM +UN +W , |
(2.41) |
где W = – Aн – потенциальная энергия внешних сил.
Неизвестные коэффициенты a1, a2 определяются из условия минимума полной энергии пластинки:
|
|
∂Э |
= 0, |
i =1, 2. |
|
|
|
|
∂a |
|
|||
|
|
|
|
|
||
|
|
i |
|
|
|
|
Отсюда: |
|
|
|
|
|
|
a − |
4 |
|
a2a5 |
(23 −41µ) = 0; |
(2.42) |
|
315 |
|
|||||
2 |
|
1 |
|
|
||
58
|
|
128 E h |
|
|
64D |
|
|
4Eha a |
2 (23 −41µ) |
|
||||
a3 a10 |
|
|
|
+ a a |
|
|
− |
|
2 |
|
|
|
− p = 0 . (2.43) |
|
|
35a2 (1−µ2 ) |
|
|
|
|
(1−µ2 ) |
||||||||
1 |
|
1 |
|
a |
|
105 |
|
0 |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравнения (2.42) и (2.43) сводятся к кубическому уравнению: |
||||||||||||||
|
|
a3 |
+ a |
h2 |
K − |
3(1−µ2 ) p0 |
K = 0, |
|
(2.44) |
|||||
|
|
|
|
16E h a8 |
|
|
||||||||
|
1 |
|
1 a8 |
|
|
|
|
|
|
|
||||
где K = |
11025 |
|
|
. |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|||||||
7031+1886µ−1681µ2 |
|
|
|
|
|
|
|
|||||||
Уравнение (2.44) решаем с использованием формулы Кардано [5], находим значения параметров a1, a2 , затем функцию прогибов
w и радиальные перемещения u.
Расчет показывает, что учет радиальных перемещений не вносит существенной поправки в значения прогибов w, и погрешность расчета без учета радиальных перемещений не превышает
0,5 %.
При расчете без учета перемещений пластинки в радиальном направлении вместо уравнений (2.42) и (2.43) имеем одно уравнение вида:
a3 |
+ a |
h2 |
35 |
− |
(1−µ2 ) p0 35 |
= 0. |
(2.45) |
||
|
|
Eha8 |
|
|
|||||
|
24 |
128 |
|||||||
1 |
1 a8 |
|
|
|
|||||
Параметр а1, рассчитанный из уравнения (2.44), определяет функцию прогибов w(r), представленную в виде (2.39), для гибкой пластинки.
Из уравнения (2.45) получим значение параметра а1, определяющего прогиб w(r) гибкой пластинки без учета радиальных перемещений.
На рис. 2.8 приведены результаты расчета максимальных прогибов в центре жесткой пластинки wmax , отнесенных к максимальным прогибам в центре гибкой пластинки wmax , полученным с по-
59
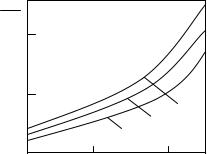
мощью формулы (2.45), в зависимости от относительной толщины пластинки (a/h); радиус пластинки a = 0,1 м, p0 = 0,1 МПа. Пред-
ставлены результаты расчета для пластин из различных материалов: кривая 1 – сталь, 2 – титан, 3 – алюминий.
По рис. 2.8 видно, что по мере утонения пластинки и перехода к мембране роль потенциальной энергии мембранных усилий возрастает.
wmax
wmax
20
10
3
2
1
50 |
100 |
150 a/h |
Рис. 2.8. Зависимость отношения максимальных прогибов жесткой пластинки к максимальным прогибам гибкой пластинки от относительной толщины пластинки
Пример 5. Рассмотрим прямоугольную пластину, свободно опертую по краям, с размерами сторон a и b (см. рис. 2.6). В этом случае функцию прогибов задают обычно в виде ряда
∞ |
∞ |
amn sin mπx sin nπy . |
|
|
w(x, y) = ∑ |
∑ |
(2.46) |
||
m=1,2... n=1,2... |
a |
b |
|
|
Ограничившись первым членом ряда (2.46), после подстановки в выражение (2.37) получим потенциальную энергию мембранных сил в следующем виде:
UN = |
3D |
a4 |
π4 |
9a4 |
+9b4 + 2(2 −µ)a2b2 . |
|
|
11 |
|
||||
h2 |
128a3b3 |
|||||
|
|
|
||||
60