

МИНИСТЕРСТВО ЦИФРОВОГО РАЗВИТИЯ,
СВЯЗИ И МАССОВЫХ КОММУНИКАЦИЙ РОССИЙСКОЙ ФЕДЕРАЦИИ
(МИНЦИФРЫ РОССИИ)
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ТЕЛЕКОММУНИКАЦИЙ ИМ. ПРОФ. М.А. БОНЧ-БРУЕВИЧА»
(СПБГУТ)

Кафедра радиосистем и обработки сигналов (РОС)
КУРСОВАЯ РАБОТА
по дисциплине «Основы радиолокации и радионавигации»
Тема работы:
Радиолокационные и радионавигационные измерители угловых координат
Выполнил:
студент 3 курса
группы РТ-01
ХХХХХХХХ
Вариант: №433
Проверил: Поддубный С.С.
Оценка:______________
Подпись______________
Дата:______________
Санкт-Петербург
2022
АМПЛИТУДНЫЙ СУММАРНО-РАЗНОСТНЫЙ РАДИОЛОКАТОР Оглавление
0. Типовое задание. 3
1. Выбор структурных схем 4
2. Расчет длины волны и параметров ФАР 8
3. Расчет параметров сигнала 8
4. Выбор параметров устройств обработки сигналов 9
5. Расчет погрешностей 10
6. Расчет энергетических параметров 14
7. Расчет вспомогательных параметров 15
8. Заключение 16
0. Типовое задание.
1. Составить и описать структурные схемы РЛ и АК с цифровым устройством, вводимым для уменьшения аппаратурной погрешности ΔθА.
2. Определить параметры антенны; зондирующего сигнала; трактов формирования и обработки сигналов; устройства уменьшения ΔθА и выдаваемого АК двоичного кода рассогласования по азимуту. Рассчитать мощности передатчика РЛ. Считать, что доплеровский сдвиг частоты компенсируется с помощью АПЧ.
3. Выбрать дальность R0, для которой производится оптимизация следящей системы АК, используя оценки σΣ при R0 = RП и R0 = RМАХ. Построить зависимость относительной полной погрешности σП/φ от R/Rmax для этих вариантов.
4. Разработать технические требования к основным элементам АК, включая передатчик, достаточные для дальнейшего проектирования.
Исходные данные
Вариант 433
|
Параметры и условия |
Значения |
ЭПР цели |
|
10 |
Размер цели |
|
12 |
Скорость цели |
|
290 |
Максимальная высота полёта |
|
25 |
Разрешающая способность по дальности |
|
60 |
Разрешающая способность по азимуту |
|
2.4 |
Диаметр ФАР |
|
0.29 |
Погрешность измерения азимута |
|
10 |
Потеря энергии сигнала по высокой частоте |
|
8 |
Потеря энергии сигнала при обработке |
|
5 |
Неидентичность фазового сдвига в приемных трактах на высокой частоте |
|
12 |
Неидентичность фазового сдвига в приемных трактах на промежуточной частоте |
|
35 |
Неидентичность коэффициентов передачи до суммарно-разностного моста |
|
0.96 |
Протяжённость зоны осадков |
|
5 |
Интенсивность осадков |
|
0.5 |















1. Выбор структурных схем
Структурная схема РЛ. В соответствии с поставленными перед РЛ общими задачами он должен иметь канал обнаружения движущихся целей (ОДЦ) и четыре измерительных канала, служащих для определения азимута, угла места, скорости и дальности цели. Наличие ОДЦ и необходимость измерения скорости требуют применения когерентного зондирующего сигнала. Последний, как указывалось, должен быть импульсным. Упрощенная структурная схема такого РД представлена на рис. 1.
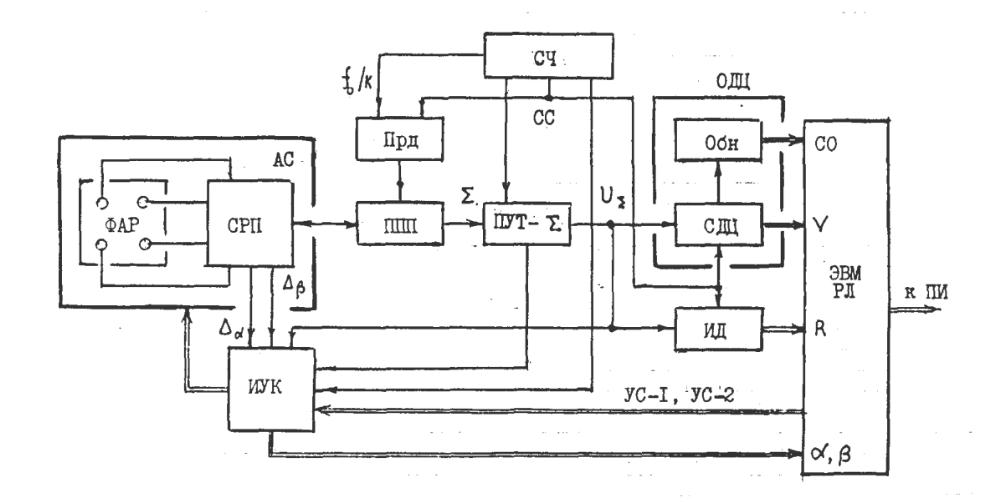
Рис. 1
Источником когерентных колебаний служит
синтезатор частот СЧ. Основой СЧ является
когерентный генератор частоты
 ,
из которой путем дробно-рациональных
преобразований формируются частоты
всех сигналов, необходимых для работы
РЛ. Передатчик Прд представляет собой
умножитель частоты
,
из которой путем дробно-рациональных
преобразований формируются частоты
всех сигналов, необходимых для работы
РЛ. Передатчик Прд представляет собой
умножитель частоты
 выдаваемого СЧ сигнала (
выдаваемого СЧ сигнала ( -
несущая частота) в k раз
с последующим усилителем мощности,
периодически отпирающимся при поступлении
с СЧ синхронизирующих импульсов с
частотой повторения (синхросигнал ОС).
Полученный в Прд зондирующий сигнал
через переключатель прием-передача
ППП направляется к антенной системе
АС.
-
несущая частота) в k раз
с последующим усилителем мощности,
периодически отпирающимся при поступлении
с СЧ синхронизирующих импульсов с
частотой повторения (синхросигнал ОС).
Полученный в Прд зондирующий сигнал
через переключатель прием-передача
ППП направляется к антенной системе
АС.
Отличительной особенностью амплитудного
суммарно-разностного радиолокатора
является использование антенной системы
(АС) с амплитудным угловым датчиком.
Такая АС может состоять из приемно-передающей
фазированной антенной решетки ФАР,
включающей диаграммообразующую схему,
и суммарно-разностного преобразователя
СРП, подобного показанному на рис. 3. В
режиме приема АС формирует суммарный
сигнал
 и два разностных сигнала
и два разностных сигнала
 и
и
 ,
несущих информацию о углах рассогласования
,
несущих информацию о углах рассогласования
 в азимутальной и угломестной плоскостях.
При пеленгации в одной плоскости
диаграмма направленности ФАР имеет
вид, показанный на рис. 2. Равносигнальное
направление РСН, от которого отсчитывается
угол рассогласования
,
проходит через точку пересечения
диаграмм
в азимутальной и угломестной плоскостях.
При пеленгации в одной плоскости
диаграмма направленности ФАР имеет
вид, показанный на рис. 2. Равносигнальное
направление РСН, от которого отсчитывается
угол рассогласования
,
проходит через точку пересечения
диаграмм
 и
и
 ,
максимумы которых сдвинуты на угол
,
максимумы которых сдвинуты на угол
 относительно РСН.
относительно РСН.

Рис. 2.
Структурная схема азимутального канала. Входящий в состав РЛ измеритель угловых координат должен определять азимут и угол места цели и содержит в связи с этим два идентичных по схеме канала: канал азимута и угломестный канал (УК).
Структурная схема азимутального канала
показана на рис. 2. Предусмотрены два
режима работы этого канала: рабочий,
когда измеряется угол
 ,
и калибровочный, когда корректируются
неидентичности трактов обработки
сигналов.
,
и калибровочный, когда корректируются
неидентичности трактов обработки
сигналов.
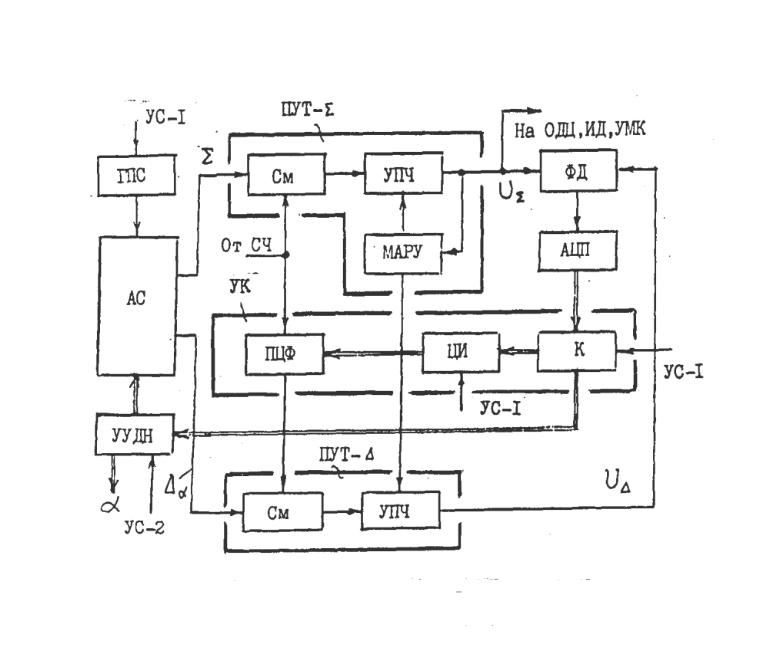
Рис. 3.
В рабочем режиме коммутатор К соединяет выход углового дискриминатора с устройством управления диаграммой направленности УУДН. Кроме того, отключается генератор пилот-сигнала ГПС.
Угловой дискриминатор содержит два ПУТ и фазовый детектор ФД. Сигнал ФД преобразуется в цифровую форму с помощью аналого-цифрового преобразователя АЦП. Устройство мгновенной автоматической регулировки усиления МАРУ служит для нормировки сигналов, с помощью которой уменьшается влияние амплитудных флуктуации входных сигналов на точность измерения угловых координат.
В идеальном амплитудном суммарно-разностном
радиопеленгаторе (т.е. в радиопеленгаторе
с идентичными характеристиками трактов
приема и усиления сигналов) суммарный
и разностный
сигналы синфазны или противофазны (в
зависимости от знака угла
).
Такой же фазовый сдвиг имеют и сигналы
 и
и
 подаваемые на ФД. Поэтому в отличие от
фазового суммарно-разностного
радиопеленгатора дополнительный
фазовращатель на
подаваемые на ФД. Поэтому в отличие от
фазового суммарно-разностного
радиопеленгатора дополнительный
фазовращатель на
 в разностном канале здесь не требуется.
в разностном канале здесь не требуется.
Информация о угле рассогласования
содержится в амплитудах принимаемых
по диаграммам
и
сигналов (см. рис. 3.1), которые при
идентичных диаграммах, т.е. при
 ,
и малых углах
имеют вид
,
и малых углах
имеют вид
 ;
;
 .
.
Разложение функций
 в степенной ряд дает
в степенной ряд дает
 ;
;
 ,
,
где
 - нормированная крутизна ДНА на РСН.
- нормированная крутизна ДНА на РСН.
При одинаковых коэффициентах усиления
ПУТ-
и ПУТ- ,
т.е. при
,
т.е. при
 ,
суммарный и разностный сигналы на входе
ФД будут
,
суммарный и разностный сигналы на входе
ФД будут
 ;
;
 .
.
Таким образом в идеальном амплитудном суммарно-разностном моноимпульсном радиопеленгаторе на выходе углового дискриминатора (на выходе ФД) действует сигнал ошибки
 (1)
(1)
где
 - коэффициент передачи фазового детектора,
а наличие члена
- коэффициент передачи фазового детектора,
а наличие члена
 в знаменателе есть следствие работы
схемы МАРУ, уменьшающей коэффициенты
усиления ПУТ-
и ПУТ-
пропорционально значению
в знаменателе есть следствие работы
схемы МАРУ, уменьшающей коэффициенты
усиления ПУТ-
и ПУТ-
пропорционально значению
 .
.
Сигнал ошибки подается (в данном случае в цифровой форме) на устройство управления диаграммами направленности УУДН, вызывая такой поворот ДНА, при котором стремится к нулю.
Как следует из сказанного, после
суммарно-разностного преобразования
информация о угле
содержится в амплитуде и фазе разностного
сигнала, а сигнал
используется как опорный при определении
фазы сигнала
 .
.
Структурная схема устройства коррекции.
В реальных амплитудных суммарно-разностных
радиопеленгаторах тракты обработки
сигналов обычно неидентичны, что приводит
к появлению аппаратурной
 погрешности при определении угловых
координат цели. Наибольшее влияние на
аппаратурную погрешность оказывают:
погрешности при определении угловых
координат цели. Наибольшее влияние на
аппаратурную погрешность оказывают:
-
 - неидентичность фазовых сдвигов сигналов
- неидентичность фазовых сдвигов сигналов
 и
и
 на высокой частоте (до СРП);
на высокой частоте (до СРП);
-
 - неидентичность коэффициентов передачи
трактов прохождения этих сигналов до
СРП;
- неидентичность коэффициентов передачи
трактов прохождения этих сигналов до
СРП;
-
 - неидентичность фазовых сдвигов
суммарного и разностного сигналов в
трактах усиления на промежуточной
частоте (в ПУТ).
- неидентичность фазовых сдвигов
суммарного и разностного сигналов в
трактах усиления на промежуточной
частоте (в ПУТ).
Сигнал на выходе углового дискриминатора (1) при неидентичных трактах приема и усиления сигналов принимает вид
 . (2)
. (2)
При нахождении цели на равносигнальном
направлении РСН, когда
 ,
сигнал
,
сигнал
 не равен нулю и ДНА продолжает свое
движение до тех пор, пока за счет
возникающего приращения амплитуд
и
не будет достигнуто условие
не равен нулю и ДНА продолжает свое
движение до тех пор, пока за счет
возникающего приращения амплитуд
и
не будет достигнуто условие
 .
Как следует из векторной диаграммы,
показанной на рис. 3.3,а, когда цель
находится на РСН, разностный сигнал на
выходе СРП не равен нулю и не ортогонален
сигналу
.
В усилительном тракте к углу
.
Как следует из векторной диаграммы,
показанной на рис. 3.3,а, когда цель
находится на РСН, разностный сигнал на
выходе СРП не равен нулю и не ортогонален
сигналу
.
В усилительном тракте к углу
 между
и
добавляется фазовый сдвиг
и сигналы
и
оказываются сдвинутыми по фазе на угол
υ=
между
и
добавляется фазовый сдвиг
и сигналы
и
оказываются сдвинутыми по фазе на угол
υ= (рис. 3.3,б). Так как в общем случае υ
(рис. 3.3,б). Так как в общем случае υ ,
то и сигнал ошибки также не равен нулю.
Движение ДНА будет продолжаться, пока
не будет выполнено условие
,
что в рассматриваемой ситуации возможно
только при υ
,
то и сигнал ошибки также не равен нулю.
Движение ДНА будет продолжаться, пока
не будет выполнено условие
,
что в рассматриваемой ситуации возможно
только при υ .
.

Рис. 4
Таким образом при неидентичных трактах
радиопеленгатора РСН в установившемся
состоянии системы слежения за углом
 ,
когда
,
отличается от направления на цель на
некоторый угол
,
который и является аппаратурной
погрешностью
радиопеленгатора. Приравнивая нулю
значение
в соотношении (2), можно получить формулу
для расчета аппаратурной погрешности
амплитудного суммарно-разностного
радиопеленгатора:
,
когда
,
отличается от направления на цель на
некоторый угол
,
который и является аппаратурной
погрешностью
радиопеленгатора. Приравнивая нулю
значение
в соотношении (2), можно получить формулу
для расчета аппаратурной погрешности
амплитудного суммарно-разностного
радиопеленгатора:
 .
.
Для уменьшения аппаратурной погрешности можно использовать также коррекцию неидентичностей трактов приема и усиления сигналов. На рис. 3 показан наиболее простой вариант устройства коррекции, основанный на введении дополнительного фазового сдвига в сигнал, усиливаемый в ПУТ- . Целесообразность применения этого варианта коррекции обоснована в § 2.1 данного пособия.