

Теория электропривода учебное пособие
..pdfрежима работы двигателя, а определяется только током возбуждения и кривой намагничивания, и связи между электромагнитной энергией поля и кинетической энергией вращающегося якоря нет. Поскольку обмена энергиями между этими емкостями нет, нет и колебательного процесса.
Составим уравнение, описывающее изменение скорости, ddωt . Зависимость
момента от скорости можно в соответствии с рис. 7.14 записать как уравнение i-й прямой из семейства характеристик с разными жесткостями:
M = M |
к.зi |
− |
Mк.зi |
ω. |
(7.35) |
|
|||||
|
|
ω |
|
||
|
|
|
0i |
|
|
Подставив (7.35) в уравнение движения, после простых преобразований аналогично (7.17) получим
Jω0i |
dω +ω= ω |
− |
ω0i |
M |
, |
(7.36) |
|
|
|
||||||
Mк.зi |
dt |
0i |
|
|
c |
|
|
|
|
Mк.зi |
|
|
|||
где синхронные скорости и моменты короткого замыка-
ния являются функциями магнитного потока ω0i = kUФ
и Mк.зi = k U Ф. Rя
Тогда уравнение (7.36) имеет вид
T |
(Ф) dω +ω= ω |
(Ф). |
(7.37) |
|
м |
dt |
я |
|
|
|
|
|
|
|
В этом уравнении, похожем на (7.19), Тм и ωя зависят от потока и растут с его уменьшением. Это уравнение нелинейное и решить его непосредственно нельзя, так как Ф = f(t). Поэтому интегрирование уравнения (7.37) целесообразно выполнять графоаналитическим способом.
При небольших пределах изменения Ф можно считать, что поток изменяется по линейному закону в функции тока
241
возбуждения (когда магнитная цепь машины не насыщена). Закон изменения тока в обмотке возбуждения при ненасыщенной магнитной цепи, как цепи R–L, описывается уравнением экспоненты, и при Ф ≡ iв закон изменения потока будет также экспоненциальным:
|
|
− |
t |
|
|
− |
t |
|
|
|
−е |
|
Tв |
+Фначе |
Tв |
. |
(7.38) |
||
Ф = Фу 1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
По линеаризованной кривой намагничивания в диапазоне изменения тока возбуждения от iв.нач до iв.уст по (7.38) строят Ф(t). На каждом участке дли-
|
|
тельностью ∆t поток Ф счита- |
||
|
|
ется |
постоянным, |
равным |
|
|
среднему значению. Анало- |
||
|
|
гично скорость двигателя в те- |
||
|
|
чение ∆t считается постоянной |
||
|
|
и равной среднему значению. |
||
|
|
Расчет кривой скорости ведет- |
||
|
|
ся с первого участка длитель- |
||
Рис. 7.15. |
Переходные процессы |
ностью ∆t, для которого из- |
||
вестны |
начальная |
скорость |
||
при |
Ф = Фн ω(t) и M(t) |
и среднее значение потока. |
||
|
|
|||
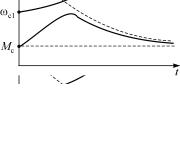
Переходные процессы по скорости и моменту, полученные численным решением, приведены на рис. 7.15.
Полученные переходные процессы определяются двумя инерционностями – J и Lв и описываются двумя дифференциальными уравнениями первого порядка, одно из которых нелинейное. Уравнения первого порядка не имеют комплексных корней, и этим обосновывается физическая невозможность обмена энергиями между двумя накопителями.
Форсировка переходных процессов. При управлении ма-
шинами постоянного тока на скоростях, выше номинальных, применяют форсировку переходных режимов возбуждения. Поскольку обмотки возбуждения электрических машин обла-
242

дают довольно большой индуктивностью, переходный процесс
вних протекает сравнительно медленно. В зависимости от мощности и скорости машин постоянная времени Тв находится
впределах от десятых долей до целых секунд. Длительность
переходного процесса в обмотках составляет (3…5)Тв, что существенно сказывается на производительности рабочих машин, если не принять мер к ускорению (форсированию) переходного процесса, в частности ускорению нарастания тока возбуждения. Как правило, форсирование возбуждения осуществляется за счет приложения к обмотке возбуждения машины повышенного напряжения на весь период нарастания тока возбуждения. На рис. 7.16 приведены схемы и переходные процессы используемых способов форсировки.
а
б |
в |
г |
Рис. 7.16. Схемы (а, б) и переходные процессы (в, г) форсировки возбуждения
В первом случае к обмотке возбуждения приложено напряжение, формируемое делителем, образованным параллельной цепью из разрядного сопротивления Rр с сопротивлением обмотки возбуждения Rв и сопротивлением форсировки Rф, как показано на рис. 7.16, а. Из условия равенства установившихся токов возбуждения при номинальном и фор-
сированном значениях напряжения Iв.н = |
Uв.н = αUв.н |
kд |
|
||
R |
|||||
|
R |
|
|||
|
в |
|
в |
||
|
|
243 |
|||

с учетом коэффициента делителя kд = |
|
RвRp |
|
|
оп- |
||||
|
R R + R R + R R |
||||||||
|
|
|
|
|
|
ф в ф p |
в |
p |
|
ределим сопротивление форсировки: |
|
|
|
|
|
||||
R |
= |
α−1 |
k |
R , |
|
(7.39) |
|||
|
|
||||||||
ф |
|
kp +1 p |
|
в |
|
|
|
||
где α – коэффициент форсировки возбуждения; kp – кратность разрядного сопротивления к сопротивлению об-
мотки возбуждения, kp = Rp .
Rв
Переходный процесс изменения тока возбуждения по схеме рис. 7.16, а описывается экспонентой с постоянной времени
Т′ |
= |
Тв (kp +α) |
. |
(7.40) |
|
|
|||||
α(kp +1) |
|||||
в |
|
|
|
Поскольку для защиты обмоток возбуждения от перенапряжений принимают kр > 1, можно считать, что по схеме
рис. 7.16, а достигается Тв′ < Тαв .
Форсировка возбуждения может быть выполнена с отсечкой, когда в цепь обмотки возбуждения вводится сопротивление Rф в момент достижения током возбуждения номинального значения (рис. 7.16, б). Момент введения сопротивления Rф в цепь обмотки возбуждения определяется из уравнения
|
|
|
|
|
|
|
|
|
|
|
t0 |
|
|
|
|
|
Uн |
|
αUн ( |
|
− |
|
) |
|
|
||||
Iв.н = |
= |
−е |
Tв |
|
(7.41) |
|||||||||
|
|
|
|
|
1 |
|
|
|
, |
|||||
R |
|
R |
|
|
|
|||||||||
|
|
в.н |
|
|
|
в.н |
|
|
|
|
|
|
|
|
откуда получим t0 |
=Tв ln |
|
α |
|
. |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
α−1 |
|
|
|
|
|
|
|
|||||
По кривым переходных процессов для рассмотренных способов (кривые 2 на рис. 7.16, в, г) видно, что наибольший
244
эффект форсировки достигается применением отсечки форсировки. Так, например, при α = 2 и принятой продолжительности переходного процесса tу = 3Tв время пуска по схеме рис. 7.16, а сократится по уравнению (7.40) примерно в 2 раза, а по схеме рис. 7.16, б – более чем в 4 раза, так как
t0 |
= |
1 ln |
2 |
|
= 0,23. |
|
tу |
2 −1 |
|||||
|
3 |
|
||||
7.8. Переходные режимы двигателей переменного тока
Переходные режимы двигателей переменного тока описываются сложной системой дифференциальных уравнений, решение которых возможно только численными методами, анализ результатов которых также усложнен. Полные структурные схемы включают в себя много блоков произведений, нелинейную кривую намагничивания, перекрестные обратные связи. Поэтому для облегчения анализа динамических процессов при различных управляющих и возмущающих воздействиях используются упрощенные структурные схемы.
Нелинейное уравнение электромеханического момента асинхронного электродвигателя (5.16) выразим в общем виде через частные производные переменных:
∆М = F(U , f , ω) = ∂∂MU ∆U + ∂∂Mf ∆f + ∂∂ωM ∆ω=
= kU ∆U + k f ∆f + kω∆ω, |
(7.42) |
где kU, kf, kω – коэффициенты усиления по напряжению, частоте и скорости.
Построение упрощенной структурной схемы (рис. 7.17) выполнено с использованием основного уравнения движения.
Полученная структурная схема позволяет рассматривать статические и динамические свойства на линеаризованных участках механических характеристик.
245

Рис. 7.17. Упрощенная структурная схема асинхронного двигателя
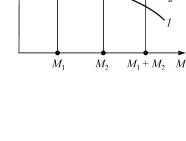
Оценить время прямого пуска tп короткозамкнутого асинхронного двигателя с известными механической характеристикой двигателя, момента сопротивления и приведенного к валу двигателя момента инерции можно с использованием уравнения движения, заменив реальную механическую
характеристику (рис. 7.18, а) приближенной: tп ≈ Jωc .
Mп − Mc
Зная tп, можно построить приближенные графики переходного процесса (тонкие линии на рис. 7.18, б). Эти графики будут отличаться от действительных ω(t) и M(t), однако во многих случаях эта оценка может быть достаточной.
а |
б |
Рис. 7.18. Механические характеристики (а) и графики переходных процессов ω(t) и M(t) (б)
при пуске асинхронного двигателя
Поскольку в переходных режимах в широких пределах изменяется магнитный поток, на характер переходных про-
246
цессов существенное влияние оказывает электромагнитная инерция. Электромагнитные переходные процессы вызывают значительные изменения тока и момента асинхронного двигателя с короткозамкнутым ротором, снижения которых можно достичь путем ограничения темпа нарастания напряжения, приложенного к двигателю при пуске, что осуществляется применением тиристорных регуляторов напряжения, тиристорных преобразователей частоты.
8. ЭЛЕКТРОМЕХАНИЧЕСКИЕ СВОЙСТВА ВЗАИМОСВЯЗАННОГО ЭЛЕКТРОПРИВОДА
8.1. Классификация и особенности электроприводов
В соответствии с принятой терминологией [5] установле-
но определение понятия взаимосвязанного электропривода. Взаимосвязанным электроприводом называются два или
несколько электрически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей и нагрузок или положения исполнительных органов рабочих машин.
Из определения выделены два типа взаимосвязанных электроприводов:
1.Многодвигательный электропривод, содержащий не-
сколько электродвигателей, механическая связь между которыми осуществляется через исполнительный орган рабочей машины. Отличительной особенностью многодвигательного (двухдвигательного) электропривода является равенство скоростей приводных двигателей и рабочей машины как в установившихся, так и в переходных режимах при рассмотрении электропривода в качестве жесткой одномассовой механической системы.
2.Электрический вал – взаимосвязанный электропривод, обеспечивающий синхронное движение двух и более ис-
247

полнительных органов рабочей машины, не имеющих механической связи. В таком взаимосвязанном электроприводе имеется лишь электрическая связь между двигателями.
Многодвигательные (чаще всего двухдвигательные) электроприводы широко применяются для главных механизмов карьерных экскаваторов, подъемно-транспортных устройств.
Системы электрического вала используются в тех случаях, когда механическая связь между исполнительными органами рабочей машины невозможна (например, электропривод ворот шлюзов, подъемных мостов) или нежелательна из-за нарушения жесткости этой связи при большой длине соединительных валов (привод опор рудно-грейферных перегружателей).
Наибольшее распространенных получили двухдвигательные взаимосвязанные электроприводы (с асинхронными электродвигателями с фазовым ротором), функциональные схемы которых с иллюстрацией передаваемых мощностей и моментов на рабочий механизм приведены на рис. 8.1.
а
б
Рис. 8.1. Функциональные схемы: а – двухдвигательного электропривода; б – электрического вала
248
Преимущества многодвигательного электропривода:
1)увеличение числа двигателей облегчает унификацию электроприводов различных по мощности установок;
2)многодвигательный электропривод имеет меньший суммарный момент инерции двигателей, чем однодвигательный соответствующей мощности при той же скорости вращения, позволяет уменьшить динамические нагрузки и повысить быстродействие электропривода;
3)возможность обеспечения резерва производительности рабочей машины при выходе из строя одной из машин двухдвигательного привода, например обеспечения работы конвейерной установки с меньшей производительностью.
Недостатки двухдвигательного электропривода:
1)усложнение схемы соединения электрических машин;
2)увеличение числа валопроводов механизма приводит
кразветвлению расчетных схем механической части электропривода, что из-за дробления масс привода усложняет ее динамику;
3)возможно возникновение неравномерного распределения нагрузки между двумя двигателями.
8.2.Электромеханические свойства многодвигательного электропривода
Из указанных недостатков многодвигательного электропривода основной является возможность неравномерного распределения нагрузок между двигателями, работающими на общий вал, работы.
Рассмотрим на примере двухдвигательного электропривода возникновение этой неравномерности нагрузки (рис. 8.2). Благодаря наличию механической связи между роторами двигателей в статическом режиме работы угловые скорости двигателей одинаковы при любых их механических
249
характеристиках, а результирующий момент электропривода равен сумме моментов двигателей:
M = M1 + M2 = β1(ω01 – ω) + β2(ω02 – ω), |
(8.1) |
где β1, ω01, β2, ω02 – модули жесткости и скорости идеального холостого хода двигателей 1 и 2. Из этого уравнения определяется уравнение совместной механической характеристики двухдвигательного электропривода:
ω= |
β1ω01 |
+β2ω02 |
+ |
M |
|
. |
(8.2) |
||
β +β |
2 |
β +β |
2 |
||||||
|
|
|
|
||||||
|
1 |
|
|
1 |
|
|
|||
Скорость двухдвигательного электропривода в статическом режиме работы определяется подстановкой в (8.2) значений М = Мс, при этом в общем случае моменты М1 и М2, развиваемые двигателями, не равны:
M1 = β1(ω01 – ω) ≠ M2 = β2(ω02 – ω). |
(8.3) |
У двухдвигательного электропривода механические характеристики на рис. 8.2 имеют разные скорости идеального холостого хода (ω01 ≠ ω02) и различные жесткости β1 и β2.
Различие параметров механических характеристик определяет неравномерность нагрузок двигателей, причиной которой является различие в параметрах двигателей, имеющих одни и те же каталожные данные.
При производстве электрических машин возможен так называемый технологиче-
ский разброс параметров,
например разница сопротивлений обмоток машин, зазоров в магнитной цепи, параметров щеточного механизма и контактных колец и т.п. Любые изменения и несоответствия в R
250