

Оптимальное проектирование конструкций
..pdfпеременных – безусловного или с дополнительными условиями в форме |
||||||||
равенств. Известно, что классический вариант вариационного исчисления |
||||||||
неприменим, если на варьируемые функции наложены ограничения в виде |
||||||||
неравенств или если варьируемые функции разрывны. Однако можно при- |
||||||||
вести одну из задач оптимального проектирования, так называемую задачу |
||||||||
Больца, которую часто используют для решения оптимизационных задач. |
||||||||
В этой формулировке присутствуют как параметры управления (оптимиза- |
||||||||
ции) u(х) = (u1(x), u2(x), ..., um(x))т, так и параметры состояния z(x) = (z1(x), |
||||||||
z2(x), |
..., zn(x))т. Задача Больца заключается |
в отыскании |
u(х) |
и |
z(x), |
|||
x0 ≤ x ≤ |
x1, которые минимизируют |
|
|
|
|
|
|
|
|
|
x1 |
|
|
|
|
|
|
|
I = F (z j ) + ∫ f0[x, z(x), u(x)]dx, |
|
|
|
|
|||
|
|
x0 |
|
|
|
|
|
|
где z j |
определяет значение переменной на концах интервала и удовлетво- |
|||||||
ряет дифференциальным уравнениям |
|
|
|
|
|
|
||
|
dzi = fi (x, z(x), u(x)) , |
|
|
|
|
|
||
|
dx |
|
|
|
|
|
|
|
а также граничным условиям |
zi (x0 ) = zi0 ; |
zi (x1) = z1i |
. При этом значения |
|||||
параметров управления должны выбираться из некоторого фиксированно- |
||||||||
го множества, определяемого системой неравенств. |
|
|
|
|
||||
|
1.4. Примеры постановки оптимизационных задач |
|
|
|||||
Пример 1.2. Оптимизация трехстержневой фермы (рис. 1.1). Целью |
||||||||
проектирования является такой выбор площадей поперечных сечений от- |
||||||||
дельных стержней s1, s2, s3 (переменные проектирования или оптимиза- |
||||||||
ции), при котором ферма была бы, по воз- |
|
L1 |
L2 |
|
|
|||
можности, легкой и удовлетворялись бы ог- |
|
|
|
|||||
раничения на напряжения, смещение узла и |
|
|
|
|
|
|||
устойчивость при продольном сжатии. |
|
|
|
|
|
|
||
Будем полагать, что материал всех |
|
|
2 |
3 |
|
|||
стержней одинаковый, однородный и упру- |
L |
1 |
|
|
||||
|
|
|
||||||
гий, размер сечения остается неизменным по |
|
|
|
|
x |
|||
всей длине. |
|
|
|
|
|
α |
||
|
|
|
|
y |
|
|||
Положим для простоты, что L1 = L2 = |
|
|
|
P |
||||
= L, тогда критерий качества (вес) можно |
|
|
|
|
|
|||
записать в виде |
|
|
|
Рис. 1.1 |
|
|
||
|
|
21 |
|
|
|
|
|
|

K = ρ g(s1 2L + s2 L + s3L 2) min , |
(1.3) |
где ρ g – удельный вес материала, из которого изготовлена ферма.
Обозначим через N1, N2, N3 усилия, которые возникают в стержнях при деформировании. Тогда, если предельное напряжение обозначить че-
рез σ 0 , то ограничения по напряжениям примут вид
|
|
|
|
|
|
|
|
|
|
|
|
|
|
σ i |
= |
Ni |
|
≤ |
σ |
0 . |
|
|
|
|
|
|
|
|
|
|
|
(1.4) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
si |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переменные Ni (переменные состояния) можно определить через |
||||||||||||||||||||||||||||||||||||||||
уравнения равновесия |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
N cos 450 + N |
2 |
|
+ N |
3 |
cos 450 = P sin α ; |
|
(1.5) |
||||||||||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
− N sin 450 + N |
3 |
sin 450 = −P cos α . |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Система статически неопределимая, поэтому запишем эти уравнения |
||||||||||||||||||||||||||||||||||||||||
через перемещение общего узла ux, uy |
|
в направлении осей |
х и у соответст- |
|||||||||||||||||||||||||||||||||||||
венно: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
||||
|
|
|
|
|
N = σ s = Eε s = Es |
(u |
|
+ u |
|
|
) |
; |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
1 1 |
|
|
1 1 |
|
|
|
|
|
1 |
|
x |
|
|
y |
|
|
2L |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
N2 |
= σ 2s2 = Eε 2s2 = Es2u y |
1 |
; |
|
|
|
(1.6) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
N |
|
|
= σ |
s = Eε |
|
|
s = Es (u |
|
− u |
|
) |
1 |
. |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
3 |
|
|
|
3 3 |
|
|
|
|
3 |
3 |
|
|
|
|
|
3 |
|
y |
|
|
|
x |
|
|
2L |
|
|
|||||
Подставляя (1.6) в уравнения равновесия (1.5), получим |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
E 2 |
(u |
x |
(s − s ) + u |
y |
(s + s |
+ 2 |
|
2s |
2 |
)) = P sin α |
; |
(1.7) |
|||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||||||||||||
|
4L |
|
|
|
|
|
1 |
|
3 |
|
|
|
1 |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
E 2 |
(u |
x |
(s |
+ s ) + u |
y |
(s |
− s )) = P cos α . |
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
4L |
|
|
|
1 |
3 |
|
|
|
|
|
|
|
|
1 |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Теперь в качестве переменных состояния удобнее взять перемещения ux, uy, тогда ограничения на перемещения примут вид
ux ≤ |
ux0 |
или |
ux − ux0 ≤ |
0 ; |
(1.8) |
u y ≤ |
u0y |
или |
u y − u0y ≤ |
0 . |
|
22

Запишем ограничения на устойчивости (при условии ux ≥ 0;u y ≥ 0 ):
N |
i |
≤ |
Pi , |
i = 1, 2, 3. |
||
|
|
э |
|
|
|
|
Эйлеровое значение силы Рi |
= |
π 2 EIi |
. |
|||
|
||||||
|
|
|
э |
|
l 2 |
|
|
|
|
|
|
i |
|
Конкретное выражение момента инерции зависит от вида профиля |
||||||
стержня, и его удобно представить в виде I = β k sk . Например, если сече- |
||||||||||||
ние круглое, то I = |
π d 4 |
= |
π d 2 |
2 |
1 |
= |
1 |
s2 (k = 2, β |
k |
= |
1 |
), а если сече- |
|
|
|
|
|
||||||||
32 |
|
|
2π |
|
2π |
|
2π |
|
||||
4 |
|
|
|
|
|
|||||||
ние |
в |
форме прямоугольника, то I = |
bh3 |
= (bh)2 |
h |
= |
h |
s2 (k = 2, |
|
|
12b |
|
|||||||
|
|
12 |
|
12b |
|||||
β k = |
h |
|
). Таким образом, если все стержни одинакового профиля (кругло- |
||||||
|
|
||||||||
|
12b |
|
|
|
|
|
|||
го или прямоугольного), то ограничения по устойчивости можно записать в виде
E(ux + u y )s1 |
|
π 2 Eβ s2 |
|
|
Eu y s2 |
|
|
π 2 Eβ s |
2 |
|
|
|||
|
|
≤ |
1 |
|
; |
|
|
|
|
≤ |
|
2 |
; |
(1.9) |
L |
L2 |
|
L |
|
L2 |
|
||||||||
|
|
|
|
|
|
|
|
|
||||||
|
E(u y − ux )s3 |
|
π 2 Eβ s |
2 |
|
|
|
|
|
|
||||
|
|
|
|
|
≤ |
3 |
. |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
L |
|
|
L2 |
|
|
|
|
|
|
|
|
Таким образом, задача свелась к определению трех чисел (s1, s2, s3), при которых критерий (1.3) минимален при выполнении ограничений (1.4, 1.8 и 1.9). Cформулированная задача является задачей нелинейного математического программирования.
Сделаем упрощение: пусть ферма – симметричная, т.е. s1 = s3. Тогда математическая формулировка оптимизационной задачи будет следующей: необходимо найти два таких значения s1 и s2 , чтобы
K = ρ g(2 2s1 + s2 )L min |
(1.10) |
при ограничениях, которые можно записать сразу через переменные оптимизации, ибо система уравнений равновесия (1.7) легко может быть решена.
В этом случае ограничениями на перемещения (1.8) будут
P cos α |
2 |
L |
≤ ux0 , |
P sin α |
2 |
L |
≤ u0y ; |
(1.11) |
|
|
|
|
|
|
|||
Es1 |
E(s1 + 2s2 ) |
|
||||||
23

на прочность (1.4): |
|
|
|
|
|
|
|
|
|
|
|||||
|
1 |
( P cos α |
+ |
P sin α |
|
) ≤ σ 0 , |
P sin α |
2 ≤ |
σ 0 ; |
(1.12) |
|||||
|
|
2 |
s1 |
|
|
s1 + s2 |
2 |
|
s1 + s2 |
2 |
|
|
|
|
|
на устойчивость: |
|
|
|
|
|
|
|
|
|
|
|
||||
s |
(− |
P cos α |
+ |
P sin α |
≤ |
π |
2β s2 |
P sin α |
s |
2 |
≤ |
π 2β s |
2 |
||
3 |
|
|
|
) |
|
3 |
, |
|
2L2 |
2 . |
|||||
2 |
|
|
s1 |
|
s1 + s2 2 |
|
2L2 |
s1 + s2 |
2 |
|
|
||||
Эта задача в дальнейшем будет решена аналитически. |
|
|
|||||||||||||
Пример 1.3. Оптимизация консольного стержня (рис. 1.2). Кон- |
|||||||||||||||
сольный стержень заданной длины, но переменной толщины прямоуголь- |
|||||||||||||||
ного поперечного сечения нагружен нагрузкой q(x). Модуль Юнга мате- |
|||||||||||||||
|
|
q(х) |
|
|
|
|
риала Е, плотность ρ, ширина b (фикси- |
||||||||
|
|
|
|
|
|
рованная). Сформулировать задачу про- |
|||||||||
|
|
|
|
|
|
|
|
ектирования стержня минимального ве- |
|||||||
|
|
|
|
|
|
х |
|
са при ограничении на прочность и тре- |
|||||||
|
|
|
|
|
|
|
бовании, чтобы смещение у(х) не пре- |
||||||||
|
Рис. 1.2 |
|
|
|
|
вышало |
величину |
∆ |
|
в |
любой точке |
||||
|
|
|
|
|
вдоль стержня. |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В качестве параметра оптимизации выберем толщину h(x), тогда |
|||||||||||||||
критерий качества (вес) можно записать в виде |
|
|
|
|
|
||||||||||
l |
ρ gbh(x)dx min . |
|
K = ∫ |
(1.13) |
|
0 |
|
|
Ограничением на перемещения является
у(х) ≤ у0.
Для записи ограничения на прочность воспользуемся положением сопротивления материалов о наибольших нормальных напряжениях, согласно которому прочность не нарушится, если справедливо соотношение
σ max = |
M max h |
≤ σ 0 , |
(1.14) |
|||
|
||||||
|
2I x |
|
|
|
|
|
где I – момент инерции сечения, σ 0 |
– предельное напряжение, |
M |
max |
– |
||
х |
|
|
|
|
||
максимальный изгибающий момент, который можно определить из уравнения изгиба стержня
d 2M |
= q(x) . |
(1.15) |
|
dx2 |
|||
|
|
24

Если записать это уравнение в переменных прогиба, то оно примет вид
|
d |
2 |
|
|
Ebh(x) |
3 |
|
d |
2 |
y |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
= q(x) . |
(1.16) |
||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
2 |
||||||
|
dx |
|
|
12 |
|
|
dx |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
Краевые условия: при х = l, М = 0, |
Q = |
dM |
= 0 , где Q – перерезы- |
|||||||||||||||
dx |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вающая сила; при х = 0, у = 0, |
|
|
dy |
= 0 . |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
||
В отличие от предыдущего примера h(x) – функция, непрерывная или разрывная, а не конечномерный вектор переменных проектирования. Поэтому задачу оптимизации можно сформулировать как вариационную или как задачу управления. Однако данную задачу можно свести и к задаче математического программирования, если разбить стержень на ряд подобластей. В каждой подобласти толщина стержня постоянна (см. рис. 1.2).
Обозначим толщину стержня на i-м участке через hi (i = 1, 2, ..., n), n – число подобластей. Оптимизационную задачу тогда можно сформулировать следующим образом: найти такой n-мерный вектор h = (h1, h2, …, hn)т, чтобы критерий качества
n |
∆ l |
min , |
K = ρ g ∑ bh |
||
i |
i |
|
i =1 |
|
|
где ∆ li – длина i-го участка при ограничениях на перемещения |
||
( yi )max ≤ |
y0 , |
|
здесь ( yi )max – максимальный прогиб на любом i-м участке, и ограничениях на прочность (1.16), которые должны выполняться на каждом участке,
(σ max )i = (M max )i hi ≤ σ 0 .
2(I x )i
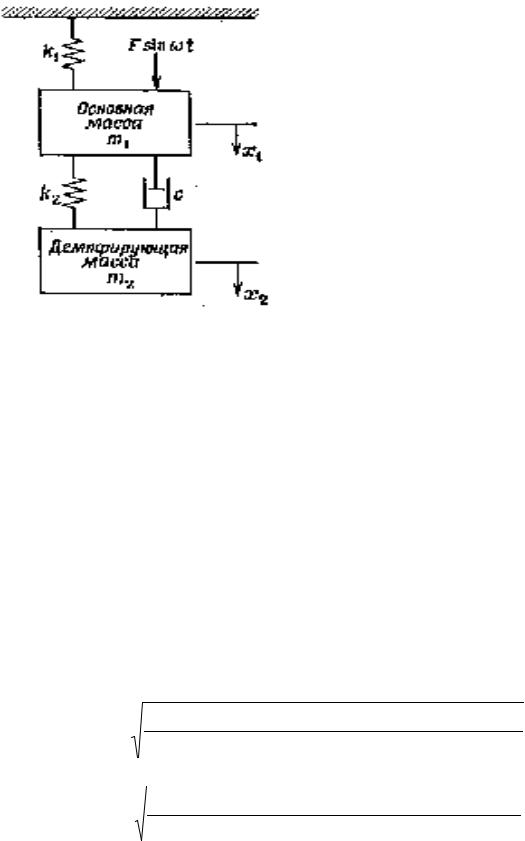
Пример 1.4. Оптимизация виброзащитных систем. Современные тенденции в проектировании ориентированы на создание гибких и легких конструкций, в которых при гармоническом воздействии могут возникать силы большой амплитуды, оказывая неблагоприятный эффект на функционирование и время жизни новой техники. Поэтому возникают задачи выбора параметров жесткости и демпфирования системы, чтобы минимизировать неблагоприятные эффекты гармонического отклика системы.
В большинстве практических ситуаций основная масса механизма может быть подвержена вибрации с большой амплитудой, в особенности,
25
|
|
|
|
|
|
|
|
|
|
|
|
|
если возбуждающая частота близка к |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
резонансной. Существует |
много |
ме- |
|
|
|
|
|
|
|
F sinωt |
|
|
||||||||
|
|
k1 |
|
|
|
|
тодик уменьшения амплитуды |
этих |
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
вибраций, по одной из которых к ос- |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
новному телу прикрепляются допол- |
|||
|
|
|
|
Основная масса |
|
|
|
|
|
|||||||
|
|
|
|
|
|
нительная масса и система пружина – |
||||||||||
|
|
|
|
|
m1 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
демпфер. Эта дополнительная масса |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x1 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
известна как амортизатор. Основная |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
масса системы |
подвергается дейст- |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
k2 |
|
|
|
c |
|
|
|
||||||||
|
|
|
|
|
|
вию вынуждающей силы с частотой ω |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
(рис. 1.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Демпфирующая |
|
Требуется найти коэффициенты |
||||||||||
|
|
|
|
|
масса mх |
|
упругости и демпфирования, которые |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
минимизируют некоторый параметр, |
|||
|
|
|
|
|
|
|
|
|
|
|
|
x2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
представляющий |
пиковое |
значение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Рис. 1.3 |
динамической характеристики основ- |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ной массы. Решение можно реализо- |
|||
вать как для стационарного, так и для переходного процесса. |
В случае |
|||||||||||||||
стационарного процесса (ω = const) в качестве критерия качества можно взять отношение экстремального смещения основной массы к ее статическому смещению. Переходный процесс характеризуется конечным набором возмущающей силы.
Уравнения движения системы имеют вид
m1x1 +k1x1 + k2 (x1−x2 ) + c(x1 − x2 ) = F sin ω t, m2 x2 + k2 (x2 − x1) + c(x2 − x1) = 0,
где m1 и m2 – соответственно основная масса и масса гасителя; k1 и k2 – жесткости пружин; с – коэффициент демпфирования; F – амплитуда воздействующей силы; ω – частота возмущающей силы.
Амплитудное значение перемещений каждой из масс можно записать в виде [9]
A1 |
= A0 |
|
|
|
(δ 2 − γ |
2 ) + 4µ2γ 2 |
|
|
; |
||
[(1 |
− γ 2 )(δ 2 |
− γ 2 ) − βδ 2 |
γ 2 ]2 + 4µ2 |
γ 2 |
(1 − γ 2 − βγ |
2 )2 |
|||||
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||
A2 |
= A0 |
|
|
|
δ 4 + 4µ2γ 2 |
|
|
|
. |
||
|
[(1− γ 2 )(δ 2 |
− γ 2 ) − βδ 2 |
γ 2 ]2 + 4µ2 |
γ 2 |
(1− γ 2 − βγ |
2 )2 |
|||||
|
|
|
|
||||||||
26

Здесь |
A = |
F |
и введены безразмерные параметры: γ |
= ω |
m1 – отношение |
||||||||
|
|||||||||||||
|
|
|
0 |
|
|
k |
|
|
|
|
|
k1 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
частоты |
|
возбуждения |
к |
|
собственной частоте |
основной системы; |
|||||||
|
|
|
|
|
|
|
|||||||
δ = |
|
k2 |
m1 – отношение частоты настройки гасителя к собственной час- |
||||||||||
|
m2 |
|
k1 |
|
|
|
|
|
|
||||
тоте основной системы; |
β |
= |
m2 |
– отношение массы гасителя к массе ос- |
|||||||||
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
m1 |
|
|
|
новной системы.
Интенсивность вязкого трения характеризуется безразмерным параметром
µ= с m1 . 2m2  k1
k1
Для данной задачи можно сформулировать несколько подзадач оптимального проектирования. Первоначально сформулируем оптимизационную постановку для стационарного случая, т.е. когда ω – постоянная величина.
Первая постановка: для заданного отношения масс β найти параметры гасителя k2 и с, минимизирующие отношение амплитудного зна-
чения основной массы к ее статическому смещению, т.е. |
A1 |
|
min при ог- |
|||||||||||||||
A0 |
|
|||||||||||||||||
раничениях |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
A2 − A1 |
|
≤ A |
; |
k |
min |
≤ k |
2 |
≤ k |
max |
; |
c |
min |
≤ c ≤ c |
max |
. |
||
|
|
|||||||||||||||||
|
|
|||||||||||||||||
|
A1 |
max |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Вторая постановка отличается от первой тем, что минимум отклика основной массы ищется в области значений возбуждающей частоты
ω min ≤ ω ≤ ω max .
Можно сформулировать оптимизационную задачу и для случая переходного процесса.
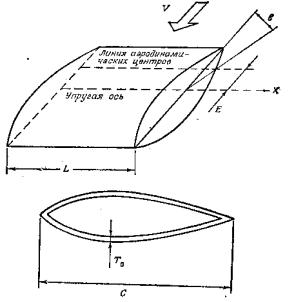
Пример 1.5. Проектирование прямоугольного крыла минимальной массы при заданной скорости дивергенции [1]. Рассмотрим консольное прямое крыло с упругой осью, перпендикулярной набегающему потоку. Предполагается, что профиль крыла не изменяется вдоль оси и характери-
зуется коэффициентом подъемной силы а0. Остальные параметры и обозначения приведены на рис. 1.4. Толщина T обшивки профиля переменна вдоль оси.
27
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Скорость дивергенции V по |
|||||||||
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
b |
|
|
отношению к кручению находит- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ся из решения следующей задачи |
|||||||||||
|
|
|
Линия аэродинами- |
|
|
|
|
|
на собственные значения: |
|
||||||||||||||||||
|
|
|
ческих центров |
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dθ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
x |
|
d |
|
|
|
|
1 |
|
|
|
|||||||||||
|
Упругая ось |
|
|
|
|
(CJ |
|
|
) + |
ρ V |
2CEa θ |
= 0, |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
E |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dХ |
dХ |
|
|
|
2 |
|
0 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
θ (0) = 0, |
|
(1.17) |
|||||
|
L |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CJ |
dθ |
|
Х= L |
= 0, |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dХ |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
Т0 |
|
|
|
|
где ρ – |
плотность набегающего |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
потока. |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
с |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если |
|
|
предположить, |
что |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Рис. 1.4 |
жесткость крыла при кручении |
|
определяется в основном нали- |
||
|
||
чием обшивки, то постоянная кручения J прямо пропорциональна толщине |
||
этого слоя (формула Бредта): J = KT. |
|
|
Уравнения (1.17) можно переписать в обычном безразмерном виде, |
||
если ввести так называемое эталонное крыло с постоянной толщиной обшивки Т0, с таким же точно профилем и с той же скоростью дивергенции.
Определяя безразмерные параметры x = |
X |
и t = |
T |
, уравнения (1.17) мож- |
|||||||||||
|
|
|
|||||||||||||
но переписать в виде |
|
L |
|
T0 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
d |
(CJ |
dθ |
) + ω 2θ = 0; θ (0) = 0; |
CJ |
dθ |
|
|
|
= 0; |
(1.18) |
||||
|
|
||||||||||||||
|
dх |
dх |
dх |
х= L |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||||
Задача оптимизации может быть поставлена следующим образом:
1
минимизировать функционал m = ∫ t(x)dx, представляющий безразмерную
0
массу обшивки, при ограничениях (1.18). Такая формулировка совпадает с принятой в теории оптимального управления.
28

2. ЗАДАЧИ ОДНОМЕРНОЙ МИНИМИЗАЦИИ
Современные оптимизационные задачи решаются с применением разнообразных алгоритмов. Анализ этих алгоритмов позволяет точно оценить их возможности и недостатки, а также рациональность применения на практике. Поэтому можно сказать, что знакомство с оптимизационными алгоритмами является необходимым (но не достаточным) условием исследования любой оптимизационной задачи. Начнем с задач безусловной оптимизации.
Для начала рассмотрим простейшие задачи, в которых изменяется только одна переменная. Это наиболее простой тип оптимизационных задач, что обусловлено следующим:
1)одномерные методы часто применяют для анализа подзадач, возникающих при использовании итерационных процедур решения оптимизационных задач большой размерности, например, для нахождения длины шага;
2)на этих задачах, как правило, идет разработка новых оптимизационных алгоритмов (удобная модель);
3)различные критерии и определения наиболее наглядны при рассмотрении функции одной переменной.
2.1. Определения и критерии оптимальности
Первоначально напомним некоторые определения. Если функция y = f (x) определена в любой точке множества всех действительных чисел,
то
y = f (x) , x S = R.
Если же x S, S = {x − 5 ≤ x ≤ 5 }, то f (x) определена в ограничен-
ной области. Область S называется областью допустимых значений. Следует всегда обращать внимание на характер зависимости функ-
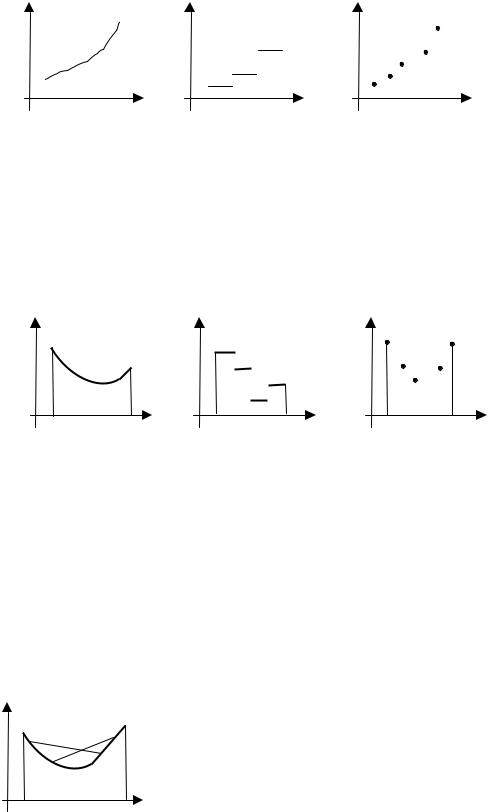
ции от аргумента, так как функции могут быть непрерывными (рис. 2.1, а), разрывными (рис. 2.1, б), переменные могут принимать только дискретные значения (рис. 2.1, в).
Наконец, функции можно классифицировать в зависимости от их формы:
1) монотонные функции: функция f (x) называется монотонной на некотором промежутке D, если для любых двух точек x1 и x2 при условии x1 < x2 выполняется одно из неравенств:
f (x1) ≤ |
f (x2 ) |
для монотонно возрастающей функции; |
f (x1) ≥ |
f (x2 ) |
для монотонно убывающей функции. |
29
f (x) |
f (x) |
f (x) |
|
|
|
x |
|
x |
|
x |
а |
б |
|
в |
|
|
Рис. 2.1 |
|
|
|
2) унимодальные функции: функция f (x) называется унимодальной на отрезке (a ≤ x ≤ b) , если она монотонна по обе стороны от единственной
на рассматриваемом отрезке точки x* , являющейся точкой минимума или максимума (рис. 2.2).
f (x) |
f (x) |
f (x) |
а |
|
|
а |
b |
x |
а |
b |
x |
|
|
b |
x |
|||||||
|
|
|
|
||||||
|
а |
|
б |
|
в |
||||
|
|
|
|
|
Рис. 2.2 |
|
|
|
|
Из определения унимодальности функции не следует правила, по которому можно было бы проверить это свойство функции. Однако в оптимизационных задачах выделен довольно широкий класс функций (выпуклые или вогнутые), для которых это свойство легко проверяется.
Функция f(x) называется выпуклой тогда и только тогда, когда для
любых двух точек x1 и |
x2 при условии x1 < x2 в области изменения |
|||
a ≤ x ≤ b и 0 ≤ λ ≤ |
1 выполняется неравенство |
|||
|
|
|
|
f (λ x1 + (1 − λ )x1) ≤ λ f (x1) + (1 − λ ) f (x2 ) . |
|
f (x) |
|
|
|
|
|
|
Свойства выпуклых функций: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) хорда, соединяющая две любые точки кри- |
|
|
|
|
вой графика выпуклой функции, всегда про- |
|
|
а |
|
ходит над кривой в интервале между этими |
|
|
b x |
точками (рис. 2.3); |
|
|
|
|
|
б) вторая производная выпуклой функ- |
|
|
Рис. 2.3 |
|
ции больше или равна нулю. |
30