

492_Nosov_V._I.__Metody_povyshenija_pomekhoustojchivosti_sistem_radiosvjazi_..
._.pdf
|
1 |
|
|
|
|
|
|
|
|
h1(f) |
0.5 |
|
|
|
|
|
|
|
|
h2(f) |
|
|
|
|
|
|
|
|
|
h3(f) |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.5 |
2 |
1 |
0 |
1 |
2 |
3 |
4 |
5 |
|
3 |
||||||||
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
h1(f) 0.5 h2(f)
h3(f) 




 0
0 









0.5
3 |
|
2 |
|
1 |
0 |
1 |
2 |
3 |
4 |
5 |
|
|
|||||||||
|
|
|
|
|
|
f |
|
|
|
|
б)
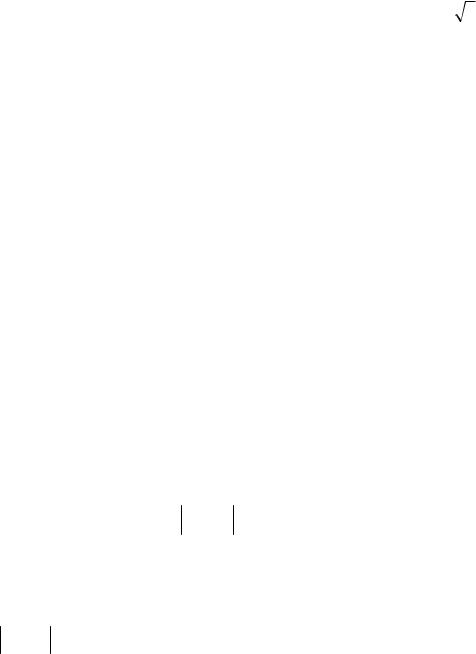
Рис. 2.4. Расстановка частот при детектировании некогерентном: а) и когерентном; б) для T 1с
скорость передачи цифрового сигнала R 50 бит/с;
период передачи символа T 0,02 с;
|
частота первого тона |
f2 100 Гц; |
|
частота второго тона |
f1 f2 1 2T 125 Гц. |
Для приведенных исходных данных расстановка частот для их разноса рав-
ного f 1 T и |
f 1 2T приведена на рис. 2.4 а) и б) соответственно. |
|
91 |
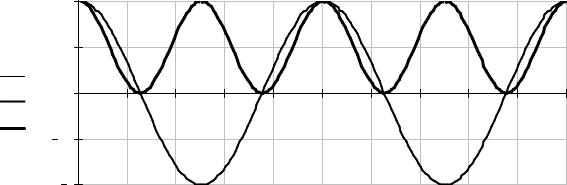
Для приведенных исходных данных временные диаграммы для сигналов
входного r t f1 t cos2 f1t , |
опорного f2 t cos2 f2t и на выходе пере- |
множителя f1(t)×f2(t) для первого канала представлены на рис. 2.5.
Из рис. 2.5 следует, что на выходе интегратора первого канала получится значение сигнала равное половине амплитуды гармонического сигнала.
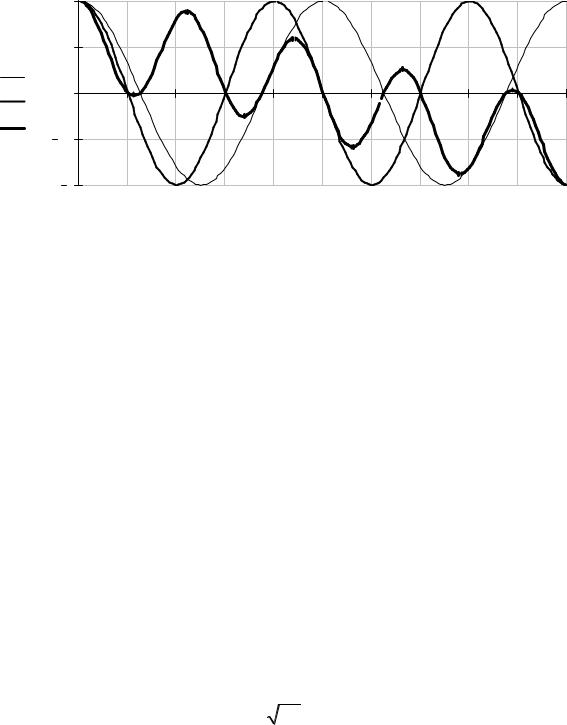
Для приведенных исходных данных временные диаграммы для сигналов входного r(t) = f1(t) = cos2 f1t , опорного f2(t) = cos2 f2t и на выходе перемножителя f1(t)×f2(t) для второго канала представлены на рис. 2.6.
Из рис. 2.6 следует, что на выходе интегратора второго канала получится значение сигнала равное нулю.
Таким образом, из рис. 2.5 и 2.6 следует, что при когерентной демодуляции сигналов их ортогональность обеспечивается при разносе частот
fразн f1 f2 1 2T .
2T .
1 |
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
f1(t) |
|
|
|
|
|
|
|
|
|
|
f2(t) |
|
|
|
|
|
|
|
|
|
|
0 |
0.002 |
0.004 |
0.006 |
0.008 |
0.01 |
0.012 |
0.014 |
0.016 |
0.018 |
0.02 |
f1(t) f2(t) |
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
Рис. 2.5. Временные диаграммы сигналов на входах f1(t), f2(t) и на выходе f1(t)×f2(t) перемножителя первого канала
92
1 |
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
f1(t) |
|
|
|
|
|
|
|
|
|
|
f2(t) |
|
|
|
|
|
|
|
|
|
|
0 |
0.002 |
0.004 |
0.006 |
0.008 |
0.01 |
0.012 |
0.014 |
0.016 |
0.018 |
0.02 |
f1(t) f2(t) |
|
|
|
|
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
Рис. 2.6. Временные диаграммы сигналов на входах f1(t), f2(t) и на выходе |
||||||||||
|
f1(t)×f2(t) перемножителя второго канала |
|
|
|
||||||
2.2 Вероятность ошибки и уровни сигналов при многопозиционной модуляции
Рассмотрим модель приемника цифровой системы передачи, показанную на рис. 2.7. Приемник состоит из двух частей: цепи обработки сигнала и обнаружителя цифрового сигнала (решающего устройства). Решающее устройство оценивает на своем входе полярность сигнала в моменты принятия решения, определяемые тактовой частотой. Ошибки при решении возникают в том случае, когда в моменты принятия решения шум будет иметь амплитуду равную или более V и полярность противоположную полярности переданного импульса. Расстояние d между максимальным значениями амплитуд импульсов V и V называется расстоянием ошибки.
Если шум имеет Гауссовское (нормальное) распределение вероятностей, то вероятность ошибки можно записать.
pош |
|
1 |
е t2 /2 2 dt, |
(2.17) |
|||
|
|
|
|
||||
2 V |
|||||||
|
|
|
|
||||
где 2 – мощность шума на входе решающего устройства.
93
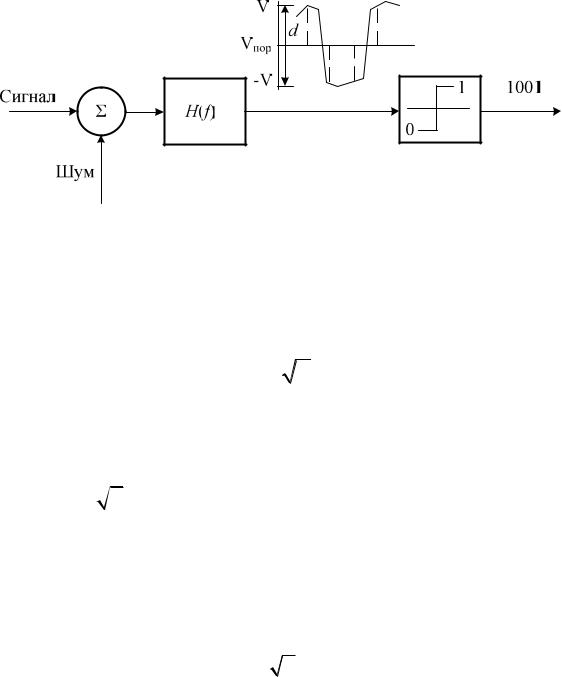
Рис. 2.7. Модель приемника цифровых сигналов
Используя функцию ошибок
|
2 |
|
z |
|
|
erf (z) |
|
e t2 dt |
(2.18) |
||
|
|
|
|||
|
|||||
|
|
|
o |
|
|
можно представить формулу (2.17) в виде
pош (1 erf (z))/2, |
(2.19) |
где z V / 
 2 .
2 .
Довольно часто вероятность ошибки выражается через функцию, дополняющую функцию ошибок
pош erfc(z) /2, |
(2.20) |
где erfc(z) 1 erf (z); |
z v/ |
2 . |
При многопозиционной модуляции в решающем устройстве рис. 2.7 обрабатывается многоуровневый сигнал, и вероятность ошибки легко определяется из (2.20), путем соответствующего уменьшения расстояния ошибок d. Так, если максимальная амплитуда сигнала равна V, то расстояние ошибок между равномерно расставленными уровнями на входе решающего устройства
94

d |
V |
|
, |
(2.21) |
|
N 1 |
|||||
|
|
|
|||
где N – число уровней сигнала в синфазном NI и квадратурном NQ каналах
при многопозиционной модуляции. Тогда в соответствии с (2.20) вероятность ошибки в многоуровневой системе
|
1 |
|
N 1 |
|
V |
|
|
|
|
|
p |
|
erfc |
|
|
|
, |
(2.22) |
|||
log2 N |
N |
N 1 |
|
|
||||||
|
|
|||||||||
ош |
|
|
2 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
где – (N 1) N – отражает тот факт, что внутренние уровни в сигнале подвержены воздействию шума с положительной и отрицательной амплитудами;
N – отражает тот факт, что внутренние уровни в сигнале подвержены воздействию шума с положительной и отрицательной амплитудами;
– коэффициент 1 log2 N – является результатом предположения, что в многоуровневой системе сигнал кодируется таким образом, чтобы ошибки в символах приводили к одиночным ошибкам в двоичном сигнале (log2 N равен числу битов на символ).
log2 N – является результатом предположения, что в многоуровневой системе сигнал кодируется таким образом, чтобы ошибки в символах приводили к одиночным ошибкам в двоичном сигнале (log2 N равен числу битов на символ).
Из выражения (2.22) следует, что с учетом отношения пикового значения сигнала к шуму на входе решающего устройства при N – уровневой передаче вносится ухудшение (смещение) характеристики ошибок, равное 20log2(N 1) дБ.
Выражение (2.22) связывает вероятность ошибки с пиковой мощностью сигнала Vsl2 . Для определения вероятности ошибки со средней мощностью сигна-
ла Vsl2 ñð в N – уровневой системе эта мощность определяется путем усреднения мощностей, соответствующих амплитудам различных импульсов
|
2 |
|
|
2 |
|
V |
2 |
|
3V |
2 |
|
2 |
|
|
2V |
2 |
|
N/2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
V |
|
|
|
|
|
|
|
|
|
|
|
... V |
|
|
|
|
|
|
|
2i 1 |
. |
(2.23) |
|
|
ср |
|
|
|
|
|
|
|
|
2 |
|
||||||||||||
sl |
|
|
|
|
|
|
|
|
|
N N 1 |
|
|
|
|
|||||||||
|
|
|
|
N N 1 |
|
N 1 |
|
|
|
|
i 1 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
При выводе (2.23) предполагалось, что появление различных амплитуд
V / N 1 1, 3,..., N 1
равновероятно, и что число уровней в квадратурных каналах N 2, т.е. позиционность модуляции M N2 4.
95
Из (2.22) следует также, что если в многоуровневой системе увеличить V в N 1 раз, то вероятность ошибки в N уровневой системе станет равной вероятности ошибки в двухуровневой системе (без учета коэффициентов 1 log2 N и (N 1)
log2 N и (N 1) N , которые обычно соответствуют нескольким десятым долям децибела).
N , которые обычно соответствуют нескольким десятым долям децибела).
В выражениях (2.21) – (2.23) параметр V есть максимальное значение амплитуды сигнала в квадратурных каналах, которое будем обозначать как sl (signal level), при М – позиционной модуляции (рис. 2.8),
Vsl (N 1) L, |
(2.24) |
где NI NQ 
 M – количество уровней в синфазном и квадратурном кана-
M – количество уровней в синфазном и квадратурном кана-
лах, соответственно; L – значение амплитуды сигнала для единичного уровня.
Из рис. 2.8 следует также, что максимальное значение амплитуды сигнала в сигнальных точках, которые будем обозначать как sp (signal point), на выходе модулятора будет равно
Vsp |
2Vsl |
2(N 1)L. |
(2.25) |
С учётом выражений (2.23) – (2.25) средняя мощность М – позиционного модулированного сигнала будет определяться по формуле
|
|
2 |
|
Vsl 2 |
|
|
|
2 |
|
|
N 1 L 2 |
|
|
|
|
|
|
|
||
V2 |
|
2 |
N/2 |
2i 1 2 |
|
2 |
N/2 |
2i 1 2 |
|
4L2 |
N/2 |
2i 1 2. |
(2.26) |
|||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||
sp ср |
|
N N |
1 |
2 |
|
|
N N 1 |
|
|
N |
|
|
||||||||
|
|
|
i 1 |
|
|
|
|
i 1 |
|
|
i 1 |
|
|
|||||||
Из рис. 2.8 следует, что при BPSK M = 2
V2 |
V2 |
ср |
L2 |
1. |
(2.27) |
sp ср |
sl |
|
|
|
96

Рис. 2.8. Уровни сигналов в квадратурных каналах и на выходе модулятора при а) – BPSK , б) – QPSK , в) – 16-QAM
При этом значение амплитуды сигнала для единичного уровня L 1 .
Для QPSK M = 4, NI NQ 
 M 2 , из выражения (2.26) получим
M 2 , из выражения (2.26) получим
|
2 |
|
4L2 N/2 |
2 |
2 |
|
|
V |
|
|
|
2i 1 |
|
2L. |
(2.28) |
|
|
|
|||||
sp ср |
|
N i 1 |
|
|
|
||
Так как при изменении позиционности модуляции средняя мощность сигнала передатчика должна оставаться неизменной, то из формул (2.27) и (2.28) следует
2L2 1, L 1 . (2.29)
 2
2
97
И тогда для модуляции QPSK нормировочный коэффициент c 1

 2.
2.
Из (2.26) – (2.29) следует, что при увеличении позиционности модуляции для сохранения средней мощности сигнала передатчика неизменной, необходимо использовать нормировочные коэффициенты, величины которых рассчитываются по формуле (2.26) с учётом (2.27) – (2.29), и приведены в таблице 2.1.
Табл. 2.1. Значения нормировочного коэффициента с
|
|
Позиционность модуляции, М |
|
|
|
|
|||||||
|
2 |
4 |
|
|
16 |
|
64 |
|
256 |
|
|||
с |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1⁄√2 |
1⁄√10 |
|
1⁄√42 |
|
1⁄√195 |
||||||||
|
|
|
|
||||||||||
Предыдущие выражения (2.17-2.22) для вероятности ошибки связывают эту вероятность с энергией сигнала в моменты принятия решения и мощностью шума на входе решающего устройства. При сопоставлении различных способов модуляции цифровыми сигналами, в частности для многоуровневых систем, более удобно связать характеристику вероятности ошибки с мощностью сигнала и мощностью шума на входе приемника.
Дисперсия шума 2 , использованная в предыдущих формулах, точно равна значению мощности, которая была бы измерена на входе решающего устройства при отсутствии сигнала
|
2 df NoПш. |
|
2 N0 H f |
(2.30) |
o
где N0 – спектральная плотность мощности шума, Вт Гц;
Гц;
Пш H f 2 df – полоса, эквивалентная по шуму, или просто шумовая
0
полоса фильтра приема с амплитудно-частотной характеристикой H( f ).
Амплитудно-частотная характеристика приемника H( f ) непременно обеспечивает компромисс между двумя противоречивыми целями. Во-первых, она должна минимизировать мощность шума, проходящего к решающему устройству, т.е. минимизировать Пш (2.30). Во-вторых, должна быть в максимально возможной степени увеличена разница между значениями V и V в моменты принятия решения. Очевидно, что следовало бы сделать максимальным отношение сигналшум V2 2 на входе решающего устройства, чтобы минимизировать вероятность
2 на входе решающего устройства, чтобы минимизировать вероятность
98
ошибки. Классический вывод из теории цифровой связи устанавливает, что V2 2 становится максимальным, когда амплитудно-частотная характеристика приемника H( f ) «согласована» с энергетическим спектром принимаемого сигнала.
2 становится максимальным, когда амплитудно-частотная характеристика приемника H( f ) «согласована» с энергетическим спектром принимаемого сигнала.
При рассмотрении во временной области характеристика согласованного фильтра реализуется путем умножения принимаемого сигнала на каждый из видов импульсов (без шума), которые могут быть приняты. Сигналы на выходе умножителей (корреляторов) интегрируются на тактовом интервале для определения результирующего среднего значения коэффициента корреляции в течение этого интервала времени. Интегратор, на выходе которого появится наибольший сигнал,
снаибольшей вероятностью указывает на символ, который был передан.
Вбольшинстве систем передачи все сигналы или импульсы имеют одинаковые формы, а различаются только по амплитуде и полярности. Поэтому может быть использован единственный согласованный фильтр. Решение принимается путем сопоставления сигнала на выходе согласованного фильтра с соответствующими уровнями решения. Сигнал на выходе единственного коррелятора h(t)
синтегратором имеет вид
T |
|
T |
|
|
|
2 d t , |
|
V |
S t h t d f |
|
|
S t |
|
(2.31) |
|
|
|
||||||
0 |
|
0 |
|
|
|
|
|
где S(t) – форма сигнала или импульса, подлежащая измерению.
Необходимо отметить, что V2 , по существу, представляет собой меру энергии сигнала на тактовом интервале
Es V 2T , |
(2.32) |
где T – длительность символа.
Используя выражение (2.20) и параметр Es (2.32) для представления энергии символа, выразим вероятность ошибки в двоичном сигнале
pош erfc(z), |
(2.33) |
где z2 Es  N0Пш .
N0Пш .
99

При передаче двоичных сигналов энергия символа Еs равна энергии, приходящейся на бит
Eb V 2Tb . |
(2.34) |
Отметим, что для заданной системы (постоянное значение Пш ) вероятность ошибок зависит от отношения энергии символа Es к спектральной мощности шума N0 .
В качестве примера типовой системы рассмотрим канал передачи импульсами постоянного тока с характеристикой типа «приподнятый косинус» и оптимальным распределением характеристик фильтрации на приеме и передаче. Амплитудный спектр сигнала на выходе передатчика соответствует корню квад-
ратному из спектра типа «приподнятый косинус» Hпд f 
 Yrc f . Согласованный
Yrc f . Согласованный
фильтр приема также имеет амплитудно-частотную характеристику, соответствующую корню квадратному из характеристики типа «приподнятый косинус»
Hпр f 
 Yrc f . Отсюда шумовая полоса приемника
Yrc f . Отсюда шумовая полоса приемника
1 /2T
Пш |
|
H f |
|
2 df |
|
|
|
Yrc f |
|
df |
1/ 2T. |
(2.35) |
|
|
|
|
|||||||||
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
Из (2.35) следует, что шумовая полоса приемника не зависит от α.
Характеристика ошибки, представленная в выражении (2.22) для многоуровневых систем, определяется мощностью шума на входе решающего устройства.
Если рассматривается постоянная шумовая полоса приемника, т.е. скорость передачи символов остается постоянной, то скорость передачи входного двоичного цифрового потока в модуляторе при этом возрастает с ростом числа уровней.
Если же требуется сопоставить многоуровневые системы при постоянной скорости передачи входного двоичного цифрового потока на входе модулятора, то длительность символов Ts и, следовательно, шумовые полосы должны быть соответственно изменены.
Если Tb – тактовый интервал для двухуровневой системы, в которой Tb Ts , то длительность символа Ts для N – уровневой системы, обеспечивающей передачу цифрового сигнала с той же скоростью
Ts Tb log2 N. |
(2.36) |
100 |
|