

409_Arhipov_Chuhrov-diskr_soobsch_Monografiya
.pdfh 2э h 2 1 g1 g2  1 ,
1 ,
2
где h - определяется (3.24) при замене h 2c на среднестатистическое значе-
ние h c2 2 P c T  2 .
2 .
При этом сохраняются отмеченные выше особенности приема сигналов в условиях действия совокупности узкополосных и флуктуационных помех.
Таким образом, анализ помехоустойчивости синтезированных алгоритмов при аппроксимации совокупности УП авторегрессионной моделью, показывает, что данная аппроксимация удовлетворительно действует при небольшом числе УП и их нешироком спектре - при так называемых “полюсных” помехах. Именно такими спектрами обладают большинство УП, создаваемых передатчиками с низкоскоростными видами передачи.
Вместе с тем, данный подход к расчету помехоустойчивости не учитывает структурные свойства совокупности УП. При допущенных упрощениях считается, что вследствие широкополосности полезного сигнала режекция части его спектра не приведет к заметному изменению его энергетических характеристик, формы и корреляционных свойств. В этом случае считаем, что после обеляющего фильтра возрастает только уровень шума, связанный с остаточной ошибкой фильтрации.
В действительности же помехоустойчивость приема полезного сигнала существенно зависит не только от количества УП, но и от их местоположения на оси частот, поскольку решетчатый фильтр фактически является режекторным фильтром, который, вырезая часть спектра полезного сигнала, уменьшает отношение мощности сигнала к спектральной плотности шума.
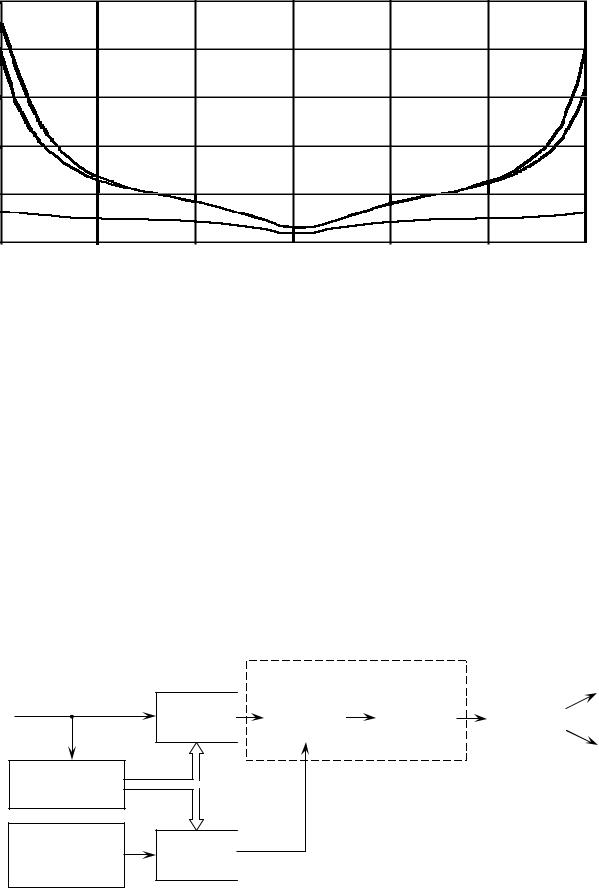
Кроме этого, необходимо отметить, что существующий подход к построению оптимального приемника не учитывает влияние импульсной характеристики РФ на форму полезного ШПС. Изменение формы полезного сигнала приведет к изменению корреляционной функции (уменьшит величину корреляционного интеграла), что приведет к увеличению вероятности ошибки. На рисунке 3.25 приведена зависимость величины корреляционного интеграла (U) на интервале принятия решения от частоты одной УП при приеме фазоманипулированной m – последовательности с базой В = 13 (в отсутствии флуктуационного шума) при разных отношениях помеха/сигнал. Здесь по оси абсцисс отложено отношение частоты УП к центральной частоте спектра ШПС.
101
U |
в |
б |
а |
fП / fmС
Рисунок 3.25 – Значение корреляционного интеграла на интервале принятия решения при различных частотах одной УП на выходе РФ 4-го порядка: (а) –
UmП / UmС = 10; (б) – UmП / UmС = 100; (в) – UmП / UmС = 200 (fmС – несущая частота сигнала)
Из рисунка 3.25 видно, что если частота УП близка к средней частоте спектра полезного сигнала, то после РФ величина корреляционного интеграла U будет иметь минимальное значение. На краях спектра полезного сигнала влияние УП уменьшается и величина U возрастает, то есть адаптивный цифровой фильтр значительно меньше искажает форму сигнала и его корреляционную функцию. Увеличение U при возрастании уровня помехи относительно полезного сигнала объясняется тем, что при малом сигнале и большой помехе сигнал практически не будет влиять на формирование коэффициентов отражения и в меньшей степени приведет к искажению его формы.
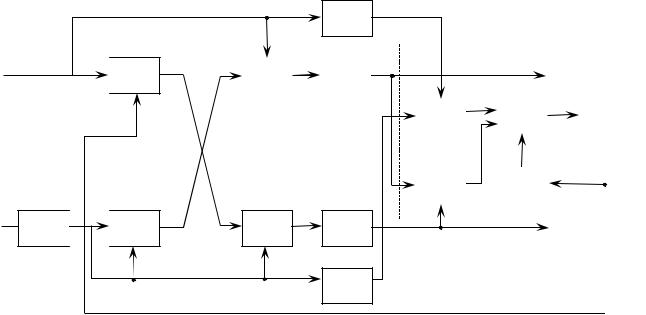
Одним из методов повышения эффективности корреляционного приема является формирование эталонного сигнала (при корреляционной обработки) с учетом импульсной характеристики РФ, как показано на рисунке 3.26.
Входной процесс x(t)
Блок
адаптации
Генератор
эталонного
сигнала
|
|
|
|
Коррелятор |
|
|
Решение |
|||
РФ |
|
|
|
|
|
|
|
|
||
|
× |
|
|
|
|
ПУ |
|
|||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
РФ |
Эталонная синхронизированная |
ПСП последовательность |
|
|
|
|
|
Рисунок 3.26 – Структурная схема оптимального приемника с введением предыскажения в эталонный сигнал
102
В данной схеме основной РФ предназначен для подавления совокупности УП, присутствующих в реализации x(t). Для расчета функции корреляции эталонный сигнал (синхронизированная псевдослучайная последовательность – ПСП) предварительно пропускается через дополнительный РФ, который имеет ту же структуру и параметры, что и, основной. Таким образом, в эталонный сигнал вносится предыскажение, согласующее форму принимаемого и эталонного сигнала, что увеличивает основной пик КФ и, следовательно, величину корреляционного интеграла на интервале принятия решения, то есть реализуется принцип оптимального приема. Теоретическое решение данной задачи наталкивается на существенные трудности, связанные с определением импульсной характеристики РФ в условиях априорной неопределенности относительно параметров УП. Поэтому предлагаемое решение можно подтвердить, используя возможности компьютерного моделирования.
Рассмотрим прием ШПС в виде фазоманипулированной m - последовательности (с базой В = 31), который поступает на вход приемного устройства в смеси с УП.
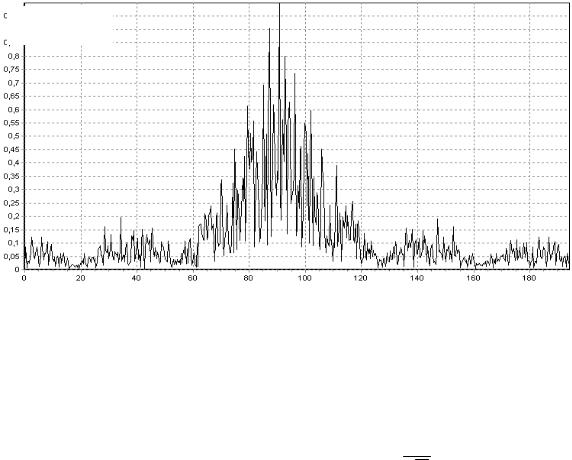
На рисунке 3.27 показан нормированный спектр сигнала. Значения по оси частот являются условными и определяются в общем случае частотой несущей принимаемого сигнала и частотой дискретизации.
S(f)/
S(fмах)
f
Рисунок 3.27 – Нормированный спектр ШПС в виде 31-разрядной m - последовательности
Ширина спектра зависит от длительности элементарного символа ПСП. Из рисунка видно, что основная энергия сигнала сосредоточена в интервале
60 – 120 Гц.
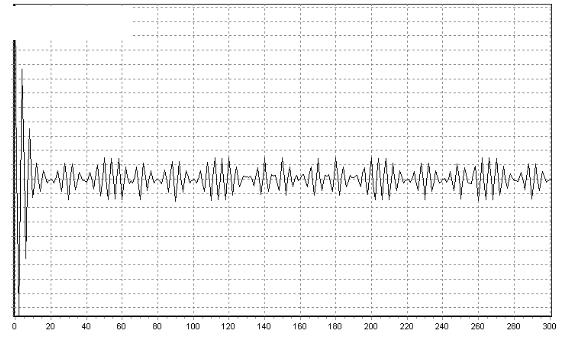
Нормированная корреляционная функция этого сигнала, показанная на ри-
сунке 3.28, имеет уровень боковых лепестков порядка 1 0.18 .

 B
B
103
1.0
R(n )/ R(0)
Рисунок 3.28 – Корреляционная функция фазоманипулированной m – последовательности с базой В = 31
Если при наличии во входной реализации трех узкополосных помех с частотами fП1 = 85 Гц, fП2 = 90 Гц, fП3 = 95 Гц, попадающими в основную часть спектра ШПС, применить решетчатый фильтра 6-го порядка, то корреляционная функция временной реализации на выходе РФ и эталонного сигнала будет иметь вид, показанный на рисунке 3.29.
Таким образом, энергетические показатели принятого сигнала после РФ ухудшаются (уровень боковых лепестков составляет более 0.5), что при учете флуктуационных шумов может привести к неопределенности процесса принятия решения и возрастанию вероятности ошибки.
На рисунке 3.30 показана нормированная корреляционная функция при использовании оптимального приема (введении предыскажения в эталонный сигнал).
104

1.0
R(n )/ R(0)
0 |
|
Рисунок 3.29 – Корреляционная функция фазоманипулированной m – последовательности и взаимокорреляционная функция на выходе РФ 6-го порядка
1.0
R(n )/ R(0)
0.0 |
|
Рисунок 3.30 – Корреляционная функция ШПС с базой В = 31 на выходе РФ 6-го порядка при введении предыскажений в эталонный сигнал
Из рисунка 3.30 видно, что пик КФ будет значительно выше, чем без учета импульсной характеристики РФ, а уровень боковых лепестков приближается к характеристикам эталонного и составляет (по огибающей КФ) порядка 0.25.
3.4 Реализация фильтров решетчатой структуры
Реализация адаптивных решетчатых фильтров, работающих в реальном масштабе времени, требует высокопроизводительных спецпроцессоров. Основным способом достижения высокой производительности процессоров в настоящее время является распараллеливание обработки информации, в частно-
105
сти, использование систолических структур. Такие структуры состоят из множества однородных процессорных секций, соединенных между собой регулярными связями и работающих под управлением единой функционально ориентированной программы.
Таким образом, решетчатый фильтр m-го порядка может быть реализован с использованием мультипроцессорной архитектуры, имеющей более высокую производительность, чем однопроцессорная реализация, за счет применения параллельной или конвейерной обработки.
В [38] предлагается использовать SIMD (Single instruction Multiple Data)
архитектуру, состоящую из L процессоров, объединенных в кольцо. Конвейерная обработка обеспечивается с помощью мультиплексора, включенного между
первым и последним процессором, как показано на рисунке 3.31. |
d = 1 |
По общей шине поступают команды из памяти программ, по каналу |
каждый процессор связан с ближайшим процессором, а по каналу d = 2 связаны процессоры, отстоящие друг от друга на две позиции. Все процессоры работают под управлением одной программы. Для SIMD – архитектуры выход фильтра y(n) и сигнал ошибки (t) вычисляются каждым процессором одновременно.
Фильтры решетчатой структуры являются более удобными для мультипроцессорной реализации, чем трансверсальные фильтры. Это объясняется тем, что в фильтрах решетчатой структуры коэффициенты отражения вычисляются независимо внутри каждой секции, поэтому можно организовать конвейерное вычисление, не прибегая к обратной связи [38].
В общем случае адаптивный решетчатый фильтр порядка m состоит из набора последовательно соединенных звеньев, каждое из которых описывается
системой уравнений |
|
p(n) = p-1(n) - Kprp-1(n-1), |
|
rp(n) = Kp p-1(n) + rp-1(n-1), 1 ≤ p P, n = 1,2,…, |
(3.29) |
где p(n), rp(n) – ошибки прямого и обратного предсказания р – го звена; Kp – коэффициент отражения или частичной корреляции (КЧК) р – го звена.
Процесс адаптации адаптивного РФ заключается в изменении передаточной функции фильтра путем настройки КЧК по критерию минимума средней мощности прямо и обратной ошибок предсказания.
Текущее значение КЧК вычисляется рекуррентно (последовательно) в момент прихода каждого последующего отсчета данных:
Kp,t+1 = Kp,t + { p(n) rp-1(n-1) + p-1(n) rp(n) }. |
(3.30) |
Выражения (3.29) и (3.30) в совокупности определяют алгоритм настройки адаптивного РФ с рекуррентным способом вычисления КЧК. Идея распараллеливания исходит из возможности независимого и одновременного вычисления отклика каждого звена фильтра и последовательного способа обмена информацией между соседними звеньями РФ. Кроме того, процессы вычисления КЧК и ошибок предсказания внутри звена РФ являются независимыми и могут быть реализованы на параллельно работающих вычислителях.
106

|
|
Память |
|
|
программ |
Общая шина |
|
|
|
Р1 |
d = 1 |
x(n) |
Р2 |
|
d = 1 |
d = 2 |
d = 2 |
|
|
|
||
x(n) |
MUX |
|
|
d = 1
y(n)
Р3 |
Р4 |
d = 1
Рисунок 3.31 – Конвейерная обработка
На рисунке 3.32 приведена схема вычислителя с реализацией j – й секции адаптивного РФ, состоящей из двух основных блоков: блока адаптации (БА), вычисляющего КЧК и звена РФ (ЗРФ), а также набора регистров задержки (Рег). Для упрощения на схемах не показаны линии синхронизации и управления.
Схема на рисунке 3.32 построена по конвейерному принципу организации вычисления [142], при котором такт конвейера – это время, в течение которого любая секция РФ заканчивает свой внутренний цикл работы.
Временные затраты на вычисление КЧК и ошибок предсказания j+1, rj+1 равны и определяются длительностью одного умножения и одного сложения.
Каждое j-е звено РФ в такт времени t на основе значений j (n), rj (n-1) в соответствии с (3.29) вычисляет j+1 (n+1) и rj+1 (n+1). Блок адаптации реализует (3.30) и формирует коэффициенты Kj (n). Дополнительная задержка в оценке градиента на один отсчет не вносит существенных искажений в результат.
При реализации схемы (рисунок 3.32) на комплекте БИС 1802, 1804 аппаратные затраты составляют 19*N корпусов БИС. Частота поступления входных выборок Fмакс = 1/ Гц, где - длительность такта конвейера. Для указанных БИС = 500 нс. В итоге реальная частота дискретизации входного процесса составляет 2 МГц и не зависит от порядка фильтра. Нормированная производительность спецпроцессора в операциях сложения и умножения составляет примерно 14 106 N операций/с.
107
Рег
j
rj (n)
Рег

 ×
×



 ×
×
– |
+ |
|
|
|
|
j+1 (n+1) |
|
БА |
|||
|
|
Рег |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ЗРФ |
|
|
× |
|
|
|
|
Рег |
||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
Kj (n) |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
× |
|
Рег |
|
|
|
|
Рег
–
rj+1 (n+1)
+
Рег
Рисунок 3.32 – Схема вычислителя с реализацией j–го звена адаптивного РФ
Следует отметить, что применение более быстродействующей элементной базы и реализация вычислителя в интегральном исполнении позволяет улучшить приведенные характеристики. Так, сигнальные процессоры фирмы Analog Devices (Tiger Sharp, Black Finn) имеют тактовую частоту 2ГГц, что позволяет обрабатывать в реальном времени сигналы с частотой до 900 МГц.
ВЫВОДЫ
1.Синтезирован адаптивный алгоритм приема сигналов, при котором процедура оценки действующих в канале связи узкополосных помех производится с помощью цифровых рекурсивных алгоритмов.
2.Для построения адаптивного цифрового фильтра предлагается использовать алгоритмы решетчатой структуры, работающих по критерию минимума среднего квадрата ошибки с экспоненциальным взвешиванием данных.
3.С целью проверки точности и адекватности разработанных моделей получены временные характеристики ошибок предсказания РФ различного порядка и оценки спектров, полученные на моделях элементарных воздействий, что позволяет с уверенностью судить о работоспособности моделей спектрального оценивания и наглядно интерпретировать результаты исследований. В частности, показано, что для подавления NП УП требуется не менее 2 NП звеньев РФ.
4.Для оценки эффективности решетчатой фильтрации определена дисперсия ошибки предсказания на выходе РФ различного порядка при наличии одной, двух и трех узкополосных помех.
5.Исследовано влияние флуктуационного шума на точность оценки коэффициентов отражения РФ, на основании которого сделан вывод о том, что
108
при отношении мощности УП к дисперсии шума h2П 20 оценка коэффициентов отражения практически не зависит от флуктуационного шума.
6. Исследовано влияние коэффициента экспоненциального взвешивания ( ) на дисперсию остаточной ошибки фильтрации. Показано, что при ограниченном объеме выборки существует оптимальное значение , при котором дисперсия остаточной ошибки фильтрации будет минимальна, причем дисперсия ошибки предсказания при оптимизации уменьшается в 1.5 – 2 раза. При увеличении объема выборки или увеличении числа звеньев РФ p > 2NП оптимальное значение будет стремиться к единице, то есть использование экспоненциального взвешивания будет малоэффективно.
7.Проанализирована помехоустойчивость полученного адаптивного алгоритма приема сигналов с цифровым подавлением узкополосных помех, для чего получено выражение для вероятности ошибок, рассчитаны кривые помехоустойчивости с учетом дисперсий ошибок оценивания на основе компьютерного моделирования.
8.Анализ результатов позволяет сделать вывод, что с увеличением порядка фильтра вероятность ошибки уменьшается в соответствии с уменьшением дисперсии ошибки фильтрации УП. Причем в случае одной УП при hc = 4 вероятность ошибки уменьшается более, чем в 100 раз для порядка фильтра Р = 2, а энергетический выигрыш при Рош = 10-3 достигает 20 дБ. При двух УП и порядке фильтра Р = 4 энергетический выигрыш при Рош = 10-3 достигает 16 дБ. При повышении порядка фильтра до 8 энергетический выигрыш возрастает до 20 дБ. Повышение порядка фильтра более четырех (для одной УП) и более 10 (для двух УП) не приводит к существенному уменьшению вероятности ошибки.
9.Рассмотрен вопрос влияния положения узкополосной помехи в спектре полезного сигнала на эффективность применения алгоритмов решетчатой фильтрации. На основании результатов компьютерного моделирования сделан вывод, что после РФ величина корреляционного интеграла U будет иметь минимальное значение, если частота УП близка к частоте несущей полезного сигнала. Если частота УП находится на краях частотного диапазона ШПС, адаптивный цифровой фильтр значительно меньше искажает форму сигнала и его корреляционную функцию, что приводит к увеличению U.
10.Для повышения эффективности корреляционного приема целесообразно пропускать опорный сигнал через дополнительный РФ с параметрами, эквивалентными параметрам основного РФ. Таким образом, согласовывается форма полезного и опорного сигналов, что приводит к увеличению основного пика КФ.
11.Рассмотрены вопросы реализации РФ, для чего предлагается использование систолических структур. Таким образом, решетчатый фильтр m-го порядка может быть реализован с использованием мультипроцессорной архитектуры, имеющей более высокую производительность, чем однопроцессорная реализация, за счет применения параллельной или конвейерной обработки. Приведена схема вычислителя с реализацией j – й секции адаптивного РФ.
109
СПИСОК ЛИТЕРАТУРЫ
1.Адаптивные фильтры. Пер. с англ./ Под ред. к.ф.н. Коуэна и П.М. Гранта.
–М.: Мир, 1988. – 392 с.
2.Айвазян С.А., Енюков И.С., Мешалкин Л.Д. Прикладная статистика. Исследование зависимостей. – М.: Финансы и статистика, 1985. – 487 с.
3.Андерсон Т. Статистический анализ временных рядов. – М.: Мир, 1976. –
755 с.
4.Апорович А.Ф. Статистическая теория электромагнитной совместимости радиоэлектронных устройств. – Минск.: Наука и техника, 1984. – 215 с.
5.Архипов С.Н. Исследование адаптивного компенсатора узкополосной помехи.//Труды третьей региональной научно-технической школы-семинара студентов, аспирантов и молодых ученых «Современные проблемы радиотехники СПР-2005», Новосибирск, НГТУ, 2005.18-22 с.
6.Архипов С.Н. Исследование временных алгоритмов пеленгации источника узкополосной помехи.// Российская НТК, тезисы доклада, Новосибирск, 2004.
7.Архипов С.Н. Компенсация узкополосных помех с применением алгоритмов пеленгации.//Материалы всероссийской научно - технической Школысеминара студентов, аспирантов и молодых ученых «Современные проблемы радиотехники СПР-2005», Новосибирск, НГТУ, 2005.
8.Архипов С.Н. Модификация устройства адаптивного подавления помехи.// Материалы доклада на Российской НТК «Информатика и проблемы телекоммуникаций», Новосибирск, 2005.
9.Архипов С.Н., Костюкович А.Е., Сединин В.И., Чухров А.С. Комплекс аппаратуры для обнаружения и подавления узкополосных и структурных помех в радионавигационном канале.//Российская НТК «Информатика и проблемы телекоммуникаций», тезисы доклада, Новосибирск, 1993.
10.Архипов С.Н., Костюкович А.Е., Сединин В.И., Чухров А.С. Цифровой анализатор помеховой обстановки в радионавигационных каналах.//Российская НТК «Информатика и проблемы телекоммуникаций», тезисы доклада, Новосибирск, 1993.
11.Архипов С.Н., Сединин В.И. Применение адаптивных антенных систем для подавления структурных помех.//В кн. «Системы и средства передачи информации по каналам связи», сб. научн. тр. учебных институтов связи.- Л., 1990.
12.Архипов С.Н., Сединин В.И. Устройство для обнаружения импульсных сигналов. / А.С. № 1706301, 1991.
13.Архипов С.Н., Сединин В.И., Сахнов С.Г. Исследование возможности одновременного подавления узкополосных и широкополосных помех.// Тезисы доклада ХХХII Областной НТК, посвященной Дню Радио, Новосибирск, 1989.
14.Архипов С.Н., Сединин В.И., Штанюк А.М. Устройство цифровой фазовой автоподстройки частоты. /А.С. № 1732466, 1992.
110