

40. Расширение числа прерываний методом поллинга
Программный способ расширения числа прерываний базируется на использовании главной программы обработки прерываний, которая при поступлении запроса производит последовательный программный опрос каждого ВУ до тех пор, пока не обнаружит устройство, пославшее запрос. Такой способ идентификации ВУ называют опросом или поллингом (Polling). Обычно он используется при объединении запросов от нескольких источников с помощью элемента «ИЛИ» и передаче их по одной линии на вход процессора (рис. 8). Главная программа обработки прерываний содержит стандартные подпрограммы проверки готовности каждого внешнего устройства к обмену данными по состоянию сигнала запроса, поступившего от него.
Каждому ВУ выделяется отдельная линия состояния, которая передаёт бит значения сигнала запроса. Когда по общей линии поступает сигнал запроса, процессор завершает цикл и начинает последовательно опрашивать линии состояния. При обнаружении сигнала запроса основная программа передает управление подпрограмме обслуживания ВУ. При одновременном запросе на прерывание от нескольких ВУ обслуживается устройство, которое опрашивается первым. Таким образом, приоритетность обслуживания определяется позицией устройства в списке опроса.
Поллинг подобен обычной проверке сигнала готовности ВУ, которая используется при программно-управляемом обмене данными. Процессор опрашивает каждый из источников прерываний, пока не обнаружит тот, который послал запрос. Преимущество использования поллинга в системах прерывания (по сравнению с системами без прерываний) состоит в том, что при наличии запроса один из входов всегда является активным. Поллинг целесообразно использовать при небольшом числе источников прерывания. Система прерываний с программным опросом, или поллинговая система прерываний, позволяет расширить число источников радиальной системы прерываний. Ее недостаток – задержка начала обслуживания ВУ, связанная с опросом.

41. Система команд микропроцессора к1816ве48. Команды пересылки с регистровым способом адресации
Регистровая адресация используется для обращения к восьми рабочим регистрам выбранного банка рабочих регистров. Номер регистра записывается в трех младших битах команды. Например:
MOV A, R7 ;Во втором операнде использована регистровая адресация (в первом операнде неявная а
![]()
42. Система команд микропроцессора к1816ве48. Команды пересылки с косвенно-регистровым способом адресации
Косвенно-регистровая адресация используется для обращения к ячейкам внутреннего ОЗУ данных. В качестве регистров-указателей используются регистры R0, R1 выбранного банка регистров
MOV A, @R0 ;Косвенно-регистровая адресация использована во втором операнде
MOV @R1, A ;Косвенно-регистровая адресация использована в первом операнде
![]()
43. Система команд микропроцессора К1816ВЕ48. Команды пересылки с непосредственным способом адресации Непосредственная адресация позволяет выбрать из адресного пространства памяти программ константы, явно указанные в команде, например:
MOV A, #11h ;помещает в аккумулятор число 11h
MOV R5, #48 ;помещает в регистр R5 число 48

44. Система команд микропроцессора К1816ВЕ48. Арифметические команды с регистровым способом адресации
![]()
45. Система команд микропроцессора К1816ВЕ48. Арифметические команды с косвенно-регистровым способом адресации

46. Система команд микропроцессора К1816ВЕ48. Арифметические команды с непосредственным способом адресации
![]()
![]()
47. Система команд микропроцессора К1816ВЕ48. Логические команды с регистровым способом адресации
![]()
48. Система команд микропроцессора К1816ВЕ48. Логические команды с косвенно-регистровым способом адресации


49. Система команд микропроцессора К1816ВЕ48. Логические команды с непосредственным способом адресации
![]()
![]()
![]()
50. Система команд микропроцессора К1816ВЕ48. Команды сдвига

51. Система команд микропроцессора К1816ВЕ48. Команды передачи управления, использующие полный адрес

52. Система команд микропроцессора К1816ВЕ48. Команды передачи управления, использующие флаги регистра PSW


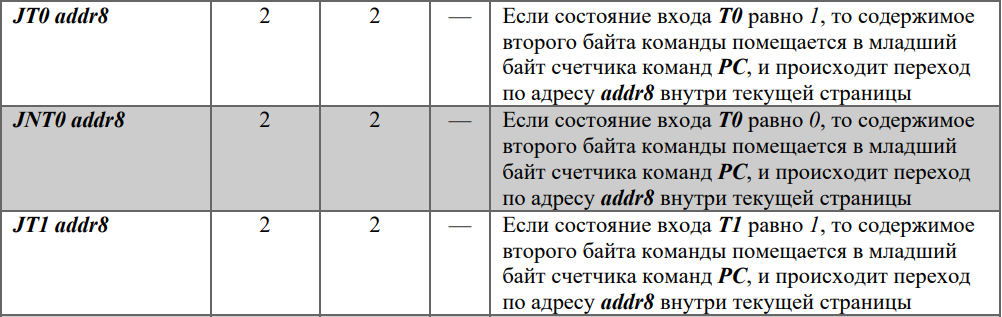
53. Система команд микропроцессора К1816ВЕ48. Команды передачи управления, работающие с тестируемыми входами.

54. Система команд микропроцессора К1816ВЕ48. Команды передачи управления, работающие с аккумулятором.

55. Система команд микропроцессора К1816ВЕ48. Команды управления.

![]()
56. Система команд микропроцессора К1816ВЕ48. Команды ввода-вывода, работающие с встроенными портами.

57. Система команд микропроцессора К1816ВЕ48. Команды ввода-вывода, работающие с внешними портами

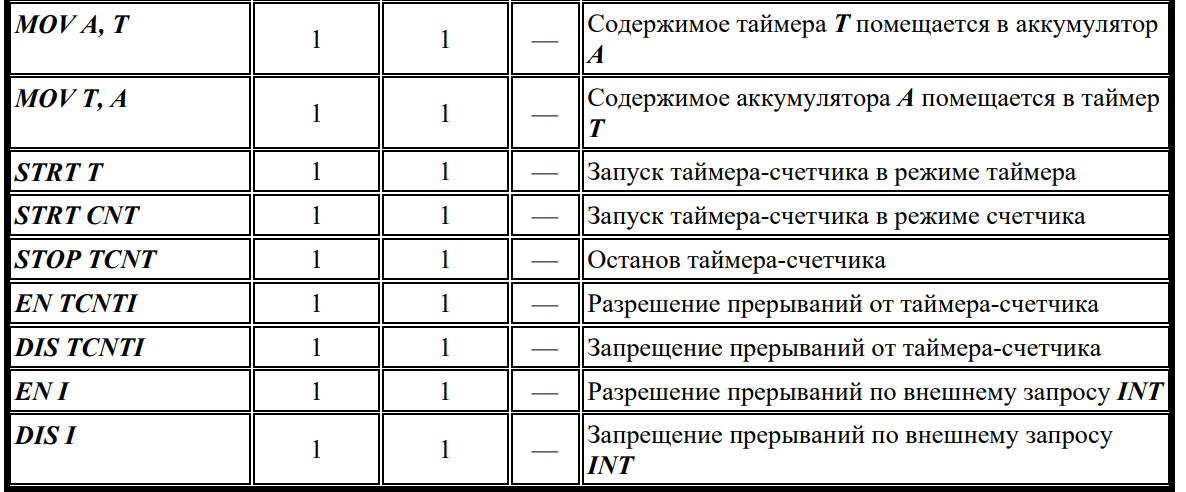
58. Система команд микропроцессора К1816ВЕ48. Команды ввода-вывода, работающие с таймером и прерываниями
59. Подключение двоичных датчиков к портам микропроцессора К1816ВЕ48
Двоичные датчики типа да/нет, например концевые выключатели, которые подключаются к МК так.
Ожидание статического сигнала. Типовая процедура ожидания события (WAIT) состоит из следующих действий: ввода сигнала от датчика, анализа значения сигнала и передачи управления в зависимости от состояния датчика. Блок-схема алгоритма процедуры ожидания события, фиксируемого замыканием контакта двоичного датчика. Конкретная программная реализация процедуры зависит не только от типа МК, но и от того, каким образом датчик подключен к МК. Он может быть подключен к одной из линий портов МК или к специальным тестируемым входам (Т0, Т1 для МК48).
Например, при подключении датчика к линии бита 3 порта 1 программа реализации процедуры ожидания замыкания контакта будет иметь вид:
При подключении датчика к тестовому входу Т0 микроконтроллера МК48 программа будет иметь вид:
; версия для МК48
WAITC: JT0 WAITC ; если контакт разомкнут, то цикл.
Другим частным случаем типовой процедуры ожидания события является процедура ожидания размыкания контакта, которая может быть реализована следующим образом:
; версия для МК48
WAITO: IN A,P1 ; ввод байта CPL A ; инвертирование
JB3 WAITO ; если контакт замкнут, то цикл
; версия для МК51
WAITC: JB P1.3,WAITC ; ожидание замыкания
; контакта датчика
Наравне с входами Т0 и Т1 для опроса датчика может использоваться и вход ЗПР. В этом случае надо предварительно запретить прерывания и использовать вход ЗПР как тестовый.
Режим прерывания целесообразно использовать только для опроса особо важных датчиков с целью уменьшения времени реакции на исключительную (аварийную) ситуацию в объекте управления.