

3.3. Тестовые задания
1. Имеется однофазный трансформатор номинальной мощностью Sн=100кВ·А и номинальными напряжениями U1н = 6000 В и U2н = 400 В при частоте тока f = 50 Гц; Действующее значение напряжения, приходящегося на один виток обмотки, Uвит= 5 В.
Определить: числа витков обмоток трансформатора.
2. Имеется однофазный трансформатор номинальной мощностью Sн=100кВ·А и номинальными напряжениями U1н = 6000 В и U2н = 400 В при частоте тока f = 50 Гц;
Определить: токи в первичной (I1н) и вторичной (I2н) обмотках
3. Имеется однофазный трансформатор номинальной мощностью Sн = 100 кВ·А и номинальными напряжениями U1н = 6000 В и U2н = 400 В при частоте тока f = 50 Гц.
Определить: площадь поперечного сечения стержня магнитопровода (Qст), если максимальное значение магнитной индукции в стержне Вст= 1,4 Тл.
4. Номинальные значения первичного и вторичного напряжений однофазного трансформатора U1н = 110 кВ, U2н = 6,3 кВ. Номинальный первичный ток I1н = 95,5 А.
Определить номинальную мощность трансформатора Sн и номинальный вторичный ток i2н.
5. Трехфазный силовой трансформатор номинальной мощностью Sн = 100
кВ·А включен по схеме Y/Δ. Номинальные линейные напряжения на входе и на выходе соответственно равны: U1н = 10 кВ и U2н = 0,4 кВ.
Определить: соотношение витков в первичной (w1) и вторичной (w2) катушках.
6. Трехфазный силовой трансформатор номинальной мощностью Sн = 100
кВ·А включен по схеме Y/Δ. Номинальные линейные напряжения на входе и на выходе соответственно равны: U1н = 10 кВ и U2н = 0,4 кВ.
Определить: номинальные значения фазных токов в первичной (I1ф) и вторичной (I2ф) обмотках.
7. Имеется трехфазный силовой трансформатор номинальной мощностью Sн = 100 кВ·а. Номинальные напряжения первичной и вторичной обмоток соответственно равны U1н = 10 кВ и U2н = 0,4 кВ. Опытом установлено, что мощность и напряжение короткого замыкания соответственно равны: Pк = 2кВт, uк% = 4,5. Коэффициент мощности нагрузки равен Cosφ2 = 0,8.
Определить: относительное изменение напряжения на вторичной обмотке трансформатора при изменении нагрузки от нуля до номинальной.
8. Имеется трехфазный силовой трансформатор ТМ – 25/10. Его номинальные данные: мощность Sн = 25 кВ·А, мощность короткого замыкания Рк = 0,6 кВт, мощность холостого хода Ро = 130 Вт
Определить: кпд трансформатора при коэффициента нагрузки
β= 0,5 и β = 1,0 при коэффициенте мощности нагрузки Cosφ2 = 0,8.
9. Однофазный трансформатор подключен к сети с напряжением U1= 220В и частотой f = 50 Гц. Максимальное значение магнитной индукции в стержне составило В = 1,4 Тл. Сечение стержня Qст = 7,1·10 – 4 м2.
Определить напряжение холостого хода вторичной обмотки, если её число витков w2 = 167.
10. Однофазный трансформатор подключен к сети с номинальным напряжением U1 = 220 B. Напряжение на вторичной обмотке составило U2н = 24 В при токе I2н = 2 А.
Определить номинальную мощность трансформатора и ток в первичной цепи.
занятиЕ №3. АСИНХРОННЫЕ МАШИНЫ
1. Вводная часть
1.1. Назначение занятия
Занятие предназначено для изучения устройства, работы и классификации асинхронных электрических машин, режимов их работы и вариантов практического использования, принципов получения вращающегося магнитного поля и обеспечения его круговой формы, ознакомления обучаемых с простыми математическими моделями и диаграммами и их использованием для определения эксплуатационных характеристик машины по данным опытов холостого хода и короткого замыкания, усвоения ими правил построения и практическим использованием энергетической диаграммы и механической характеристики асинхронного электродвигателя, условий и способов надежного запуска и устойчивой работы, способов и эффективности регулирования вращающего момента и частоты вращения ротора, практических схем подключения двигателя к источнику питания с учетом поставленной задачи, приобретения знаний и умений по обеспечению работы асинхронного двигателя с однофазной сетью, условиями обеспечения самозапуска, построения электрических схем, расчета пусковых и рабочих конденсаторов.
1.2. Цели занятия
В конце обучения по данному занятию обучаемый должен быть способен:
Объяснить устройство асинхронной машины;
Выполнить классификацию типов асинхронных машин;
Рис.3.1. Структура занятия
Объяснить принцип работы асинхронного электродвигателя;
Объяснить способ создания вращающегося магнитного поля, создаваемого многофазной системой обмоток;
Перечислить и объяснить условия создания кругового вращающегося магнитного поля в зазоре асинхронного двигателя;
Назвать типы статорных обмоток асинхронных машин, их достоинства и недостатки;
Перечислить и объяснить физический смысл параметров статорной обмотки;
Нарисовать развернутую схему статорной обмотки любого типа:
Объяснить устройство короткозамкнутой и фазной обмоток ротора асинхронной машины;
Объяснить поведение подключенной к сети асинхронной машины при неподвижном роторе;
Перечислить, какие параметры двигателя нужно знать для определения пускового тока, уметь найти формулу и выполнить расчет;
Нарисовать схему включения асинхронной машины в качестве фазорегулятора и индукционного регулятора, объяснить их назначение;
Объяснить физический смысл понятия скольжения ротора;
Вычислить частоту вращения ротора двигателя, подключенного к сети промышленной частоты, с учетом числа полюсов и скольжения;
Объяснить специфику приведения параметров роторной цепи к статору асинхронной машины в отличие от трансформатора;
Рис.3.2. Цели занятия
Объяснить назначение круговой диаграммы, показать на диаграмме определение потребляемой и полезной мощности двигателя при известном потребляемом токе;
Нарисовать полную механическую характеристику асинхронной машины и объяснить возможные режимы работы;
Нарисовать механическую характеристику асинхронного двигателя и объяснить её характерные точки;
Объяснить, какими способами можно регулировать величину вращающего момента двигателя при заданном скольжении;
Перечислить способы повышения пускового момента асинхронного двигателя;
Назвать способы пуска асинхронного двигателя и нарисовать схемы, их реализующие;
Перечислить способы запуска асинхронного двигателя от однофазной сети;
Нарисовать схемы включения конденсаторных двигателей и определить необходимую емкость конденсаторов.
2. Основная часть
2.1. Устройство и классификация асинхронных машин
Асинхронные машины являются самым распространенным типом бесколлекторных электрических машин переменного тока. Устройство её активных частей показано на рис. 3.3. Магнитопровод статора 1 набран из листов электротехнической стали, изолированных друг от друга лаковой пленкой. На его внутренней поверхности выполнены пазы 2, в которых размещена статорная обмотка. Магнитопровод ротора 3 также набран из стальных листов и напрессован на вал 4. На внешней поверхности ротора также имеются пазы 5 для размещения роторной обмотки.

Рис.3.3. Поперечный разрез асинхронной машины:
1 – магнитопровод статора; 2 – обмотка статора; 3 – магнитопровод ротора; |
4 – вал; 5 – стержень обмотки ротора |
Как и любая другая электрическая машина, асинхронная машина обратима: она может работать как в режиме двигателя, так и в режиме генератора. В качестве генераторов асинхронные машины используются редко из-за сложности их эксплуатации. Этот режим чаще используют для торможения ротора при работе машины в двигательном режиме. Асинхронные электродвигатели составляют основу современного электропривода различных производственных механизмов. Наибольшее распространение получили трехфазные асинхронные двигатели, рассчитанные на работу от сети промышленной частоты (50 Гц). Специальные исполнения рассчитаны на работу от источника повышенной частоты (200; 400; 1000 Гц и более).В устройствах автоматики и маломощных приводах встречаются двухфазные асинхронные электродвигатели. Маломощные асинхронные двигатели нередко приходится подключать к однофазной сети. Для запуска и устойчивой работы такого двигателя применяют специальные пусковые устройства (конденсаторы, сопротивления и др.) с различными схемами их включения. Асинхронные электродвигатели имеют различные исполнения. Это зависит от конструкции роторной обмотки: различают электродвигатели с короткозамкнутой обмоткой и с фазным ротором. На рис. 3.4а показано устройство ротора с короткозамкнутой обмоткой.
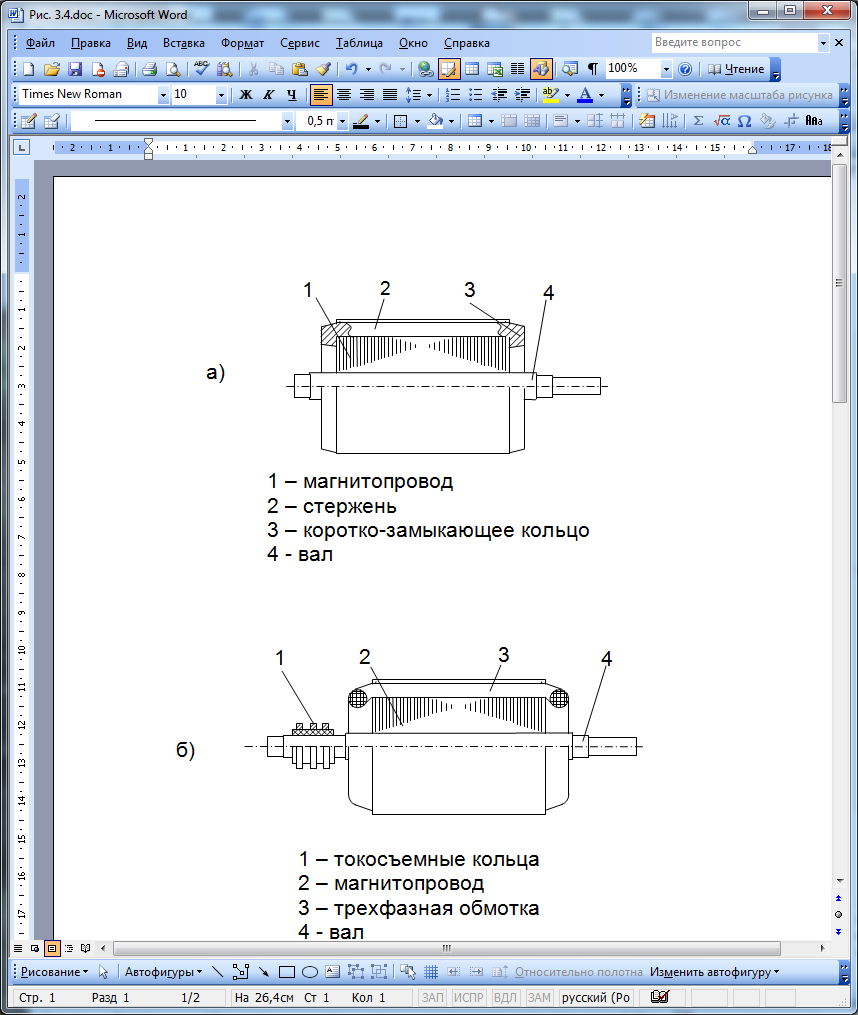
Рис.3.4, а. Конструкция ротора асинхронного
электродвигателя с короткозамкнутой обмоткой
В пазах магнитопровода 1 уложены стержни 2 из токопроводящего материала. На торцах магнитопровода стержни соединены между собой короткозамыкающими кольцами 3. Если представить себе эту конструкцию обмотки свободной от магнитопровода, то будем иметь сооружение, напоминающее беличью клетку. Такое название короткозамкнутой обмотки (беличья клетка) нередко встречается в технической литературе и в руководящих документах. Стержни и кольца образуют короткозамкнутую обмотку ротора, которая не имеет выводов для соединения с внешними приборами. Вся конструкция размещена на валу 4. В зависимости от конкретных эксплуатационных требований в двигателях встречается различная форма сечения стержней, они могут быть изготовлены из материалов как с высокой электрической проводимостью (медь, алюминий и т.п.), так и из материалов с повышенным сопротивлением (латунь и др). На рис. 3.2б показано устройство фазного ротора.
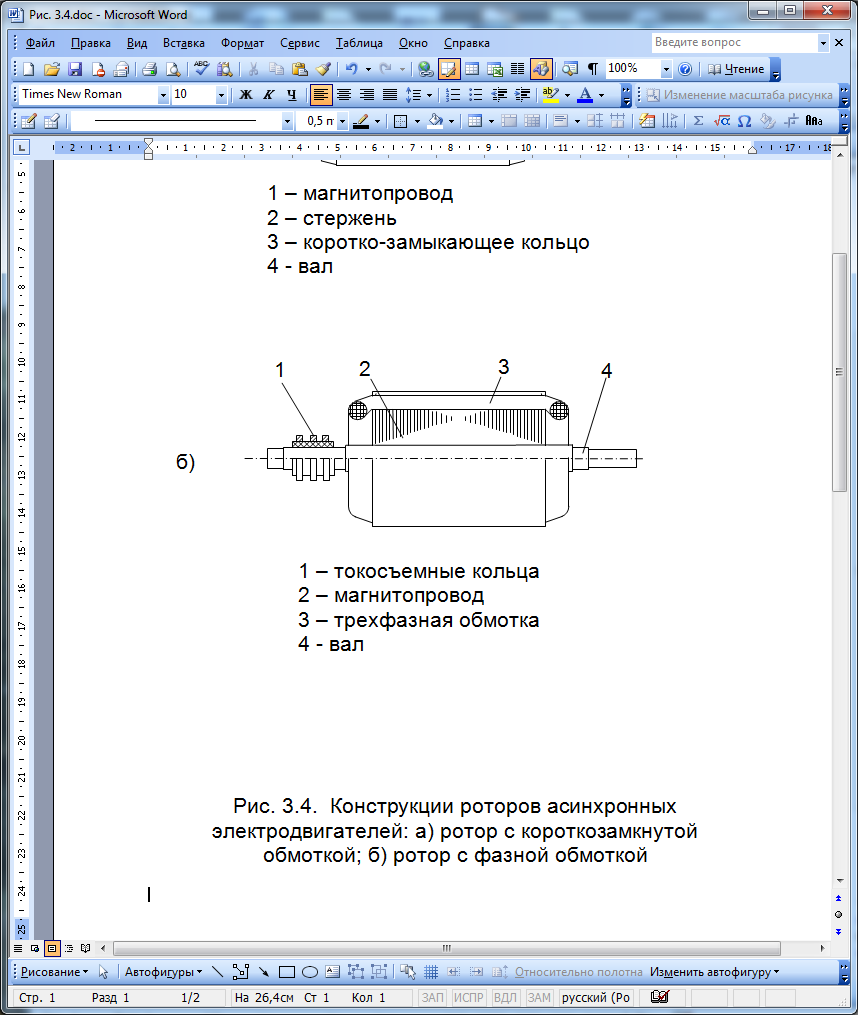
Рис.3.4, б. Конструкция ротора асинхронного
электродвигателя с фазной обмоткой
В этой конструкции в пазы магнитопровода 2 уложены катушки трехфазной обмотки 3. Три вывода этой обмотки соединены с токосъемными кольцами 1. Вся конструкция размещена на валу 4. Через скользящие контакты обмотка фазного ротора соединяется с пускорегулирующей аппаратурой. На рис. 3.5 схематически показана классификация наиболее распространенных асинхронных машин. Мощность асинхронных электродвигателей колеблется от долей ватта до тысяч киловатт, а их номинальное напряжение – от единиц вольт до десяти и более киловольт.
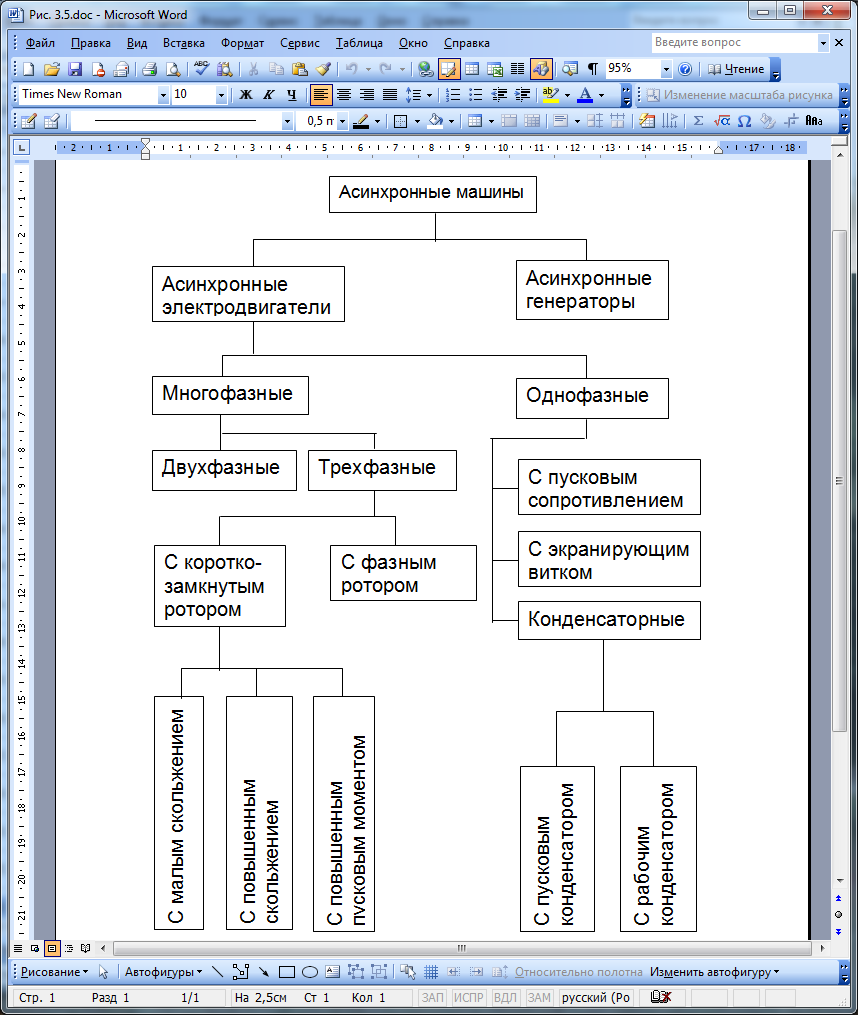
Рис.3.5. Классификация асинхронных машиин
Главные достоинства асинхронных электродвигателей состоят в том, что они имеют простую конструкцию, технологичны в изготовлении и обслуживании, надежны в эксплуатации. Они сравнительно легко поддаются как текущему, так и капитальному ремонту.
2.2. Принцип действия асинхронного электродвигателя
Работа асинхронного электродвигателя, как и других электрических машин, основана на использовании явлений электромагнитной индукции и взаимодействия тока в проводнике с внешним магнитным полем. Специфической особенностью асинхронного двигателя является то, что его статорная обмотка, подключенная к источнику переменного тока, создает вращающееся магнитное поле. Такое поле на рис. 3.6 условно представлено в виде пары полюсов «N» и «S». Предположим, что эти полюса вращаются против часовой стрелки с частотой «n1». Вращающееся вместе с ними магнитное поле Ф имеет, как обычно принято, направление от полюса «N» к полюсу «S». Между полюсами расположен ротор 1, по окружности которого равномерно распределены проводники 2. Вращающееся поле статора пересекает проводники ротора, в результате чего в них в соответствии с законом электромагнитной индукции наводится переменная ЭДС Е2. Её направление в каждом проводнике можно определить по правилу «правой руки». На рисунке направления мгновенных значений ЭДС в проводниках показаны точками к наблюдателю и крестиками - от наблюдателя. Как указывалось ранее (см. п. 3.1), проводники ротора на торцах соединены между собой токопроводящими кольцами. Поэтому под действием ЭДС Е2 в них возникает ток I2. Поскольку цепь, по которой протекает этот ток, имеет активно-индуктивный характер, то этот ток будет отставать от ЭДС на некоторый угол ψ2. В соответствии с законом Ампера токи в проводниках ротора вступают во взаимодействие с магнитным полем статора. В результате возникает механическое усилие fмех, приложенное к каждому проводнику.
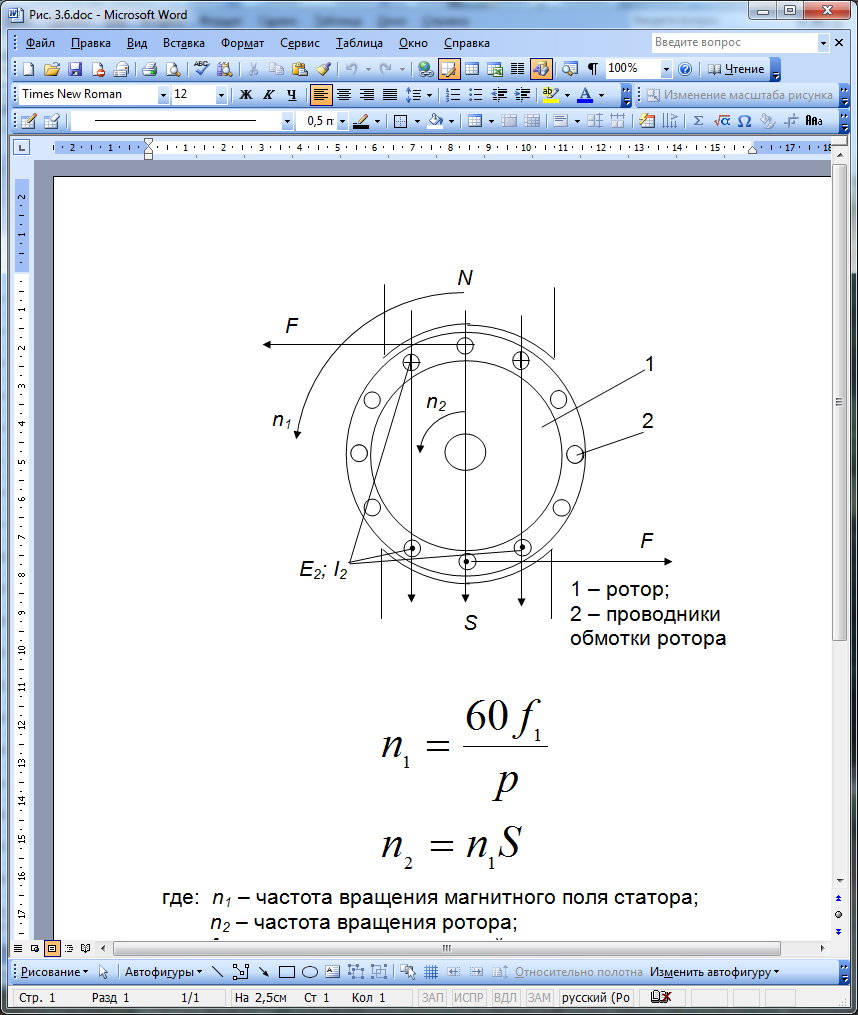
Рис.3.6. Принцип работы асинхронного электродвигателя
![]() ,
,
![]()
где: n1 – частота вращения магнитного поля статора;
n2 – частота вращения ротора;
f1 – частота тока в питающей сети;
p – число пар полюсов в машине;
S – скольжение ротора относительно вращающегося
поля статора;
F – электромагнитное усилие;
Е2 – ЭДС, индуктируемая в стержне роторной обмотки;
I2 – ток в стержне роторной обмотки
Усилия, приложенные к проводникам, находящимся на противоположных сторонах ротора, создают вращающий момент М, который стремится повернуть ротор в направлении вращения поля статора. Этот момент можно вычислить по формуле:
М=СмФI2Cos ψ2 (3.1)
где: Cм – геометрический коэффициент; Ф – поток магнитного поля статора; I2Cos ψ2 – активная составляющая тока ротора. Если развиваемый двигателем вращающий момент окажется больше момента сопротивления нагрузки на его валу, ротор придет во вращение с некоторым ускорением в соответствии со вторым законом механики. По мере увеличения частоты вращения (n2) ротора частота ЭДС Е2 будет уменьшаться до тех пор, пока ротор не достигнет установившейся скорости. При этой скорости развиваемый двигателем вращающий момент сравняется с моментом сопротивления нагрузки. Частота и амплитуда этой ЭДС станет равна нулю, если создать такие условия, чтобы ротор вращался синхронно с магнитным полем статора (n2=n1). В этом случае силовые линии поля статора уже не будут пересекать проводники ротора, поэтому в них не наводится ЭДС и ток I2 становится равным нулю. Отсюда следует, что частота вращения ротора в асинхронном двигателе всегда меньше частоты вращения магнитного поля статора. Во время работы двигателя ротор отстает от поля статора (n2<n1), то есть – вращается не синхронно с полем статора. Поэтому двигатель и называется «асинхронным». Отставание ротора от поля статора называют «скольжением», которое определяют про формуле:
S=(n1-n2)/n1=1-n2/n1 или S% = (1-n2/n1)·100% (3.2)
При неподвижном роторе (в момент пуска) его частота вращения равна нулю. Тогда S=1,0. Из изложенного следует, что при работе асинхронной машины в режиме двигателя скольжение ротора лежит в пределах 0≤S≤1,0. Чтобы машина работала с другим скольжением, её ротор необходимо вращать вспомогательным приводным двигателем. Так, если ротор привести во вращение при n2>n1, его скольжение становится отрицательным (S<0) и машина переходит в генераторный режим. Если же с помощью вспомогательного двигателя ротор вращать встречно относительно магнитного поля статора, его скольжение будет S>1,0 и машина переходит в режим электромагнитного тормоза. Во всех перечисленных режимах токи, протекающие в фазах статорной обмотки, создают магнитное поле, которое непрерывно и равномерно вращается с частотой, определяемой только частотой тока в обмотке и числом полюсов статорной обмотки.
2.3. Получение вращающегося магнитного поля
Вращающееся магнитное поле можно получить, если m-фазную систему катушек разместить в пространстве так, чтобы оси фаз были сдвинуты друг относительно друга на угол 2π/m, и запитать их m-фазной системой переменных токов. На практике используются варианты, когда m=2 (двухфазная система) и m=3 (трехфазная система). Последняя используется в асинхронных машинах наиболее часто. Простейшая трехфазная обмотка состоит из трех катушек, оси которых сдвинуты по кругу на 120о друг относительно друга. Один из вариантов такого решения представлен на рис. 3.7а). Здесь показаны три катушки А, В и С и положительные направления осей АХ, АУ и СZ каждой из них. На рис. 3.7б) показана трехфазная система токов iа, ib и ic, протекающих в соответствующих фазах обмотки и сдвинутых во времени на угол 120о. Поэтому каждая катушка создает свое магнитное поле, величина и направление которого определяется величиной и знаком тока в рассматриваемый момент времени. Так, в точке ωt=0 (где ω=2πf – циклическая частота тока; t – время) ток в фазе А положителен и достигает значения iao=ImSin60o≈ 0,866Im. Магнитное поле, соответствующее этому току, изображено стрелкой Вао. В фазе В ток в этот момент равен нулю и поэтому её поле отсутствует. Ток в фазе С – отрицательный и равен iсo=ImSin240o ≈ - 0,866Im.

A, В и С – три фазы статорной обмотки;
AX; BY и CZ – положительное направление осей фаз;
Вo; B1; B2 и B3 – направления индукции магнитного поля, соответствующие моментам времени 0; 1; 2 и 3
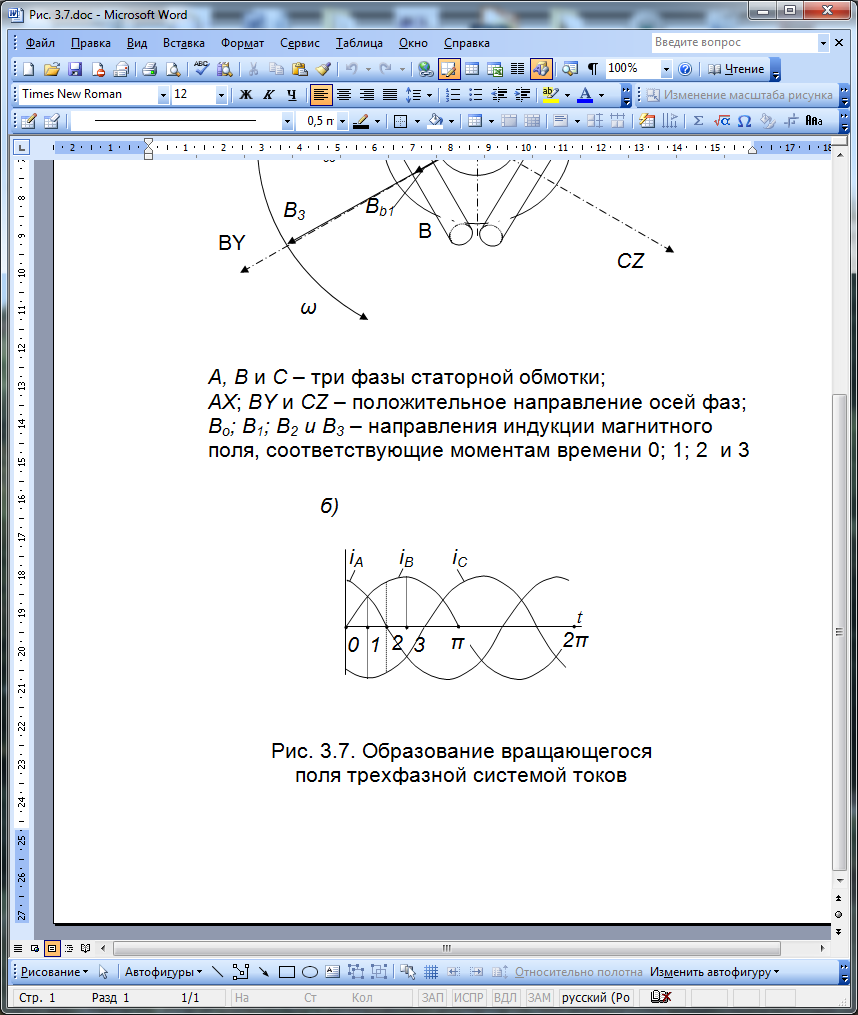
Рис.3.7. Образование вращающегося поля
трехфазной системой токов
Поэтому и её поле имеет отрицательное направление, как показано стрелкой Вbo. Магнитные поля фаз А и С складываются по правилу параллелограмма, образуя результирующее поле Во. Рассмотрим очередной момент времени, обозначенный на горизонтальной оси (рис. 3.7) точкой 1. Рассуждая аналогично предыдущему случаю, изображаем стрелками поля каждой фазы Ва1, Вb1 и Вс1, соответствующие токам фаз в этот момент. Сложив эти поля по правилу параллелограмма, получаем новое значение результирующего поля В1. Если при построениях строго соблюдать масштаб, то можно легко убедиться, что новое значение результирующего поля не изменилось по величине │В1│=│Во│, но изменило направление, повернувшись против часовой стрелки на угол 30о. Если теперь выполнить построения для всех точек оси абсцисс от 0 до 1, то можно убедиться, что стрелка, изображающая результирующее поле, поворачивается плавно. Эту стрелку удобно назвать вектором, так как она изображает и величину (модуль) и направление поля. Все сделанные выводы подтверждаются дальнейшими аналогичными построениями для точек 2; 3 и т.д. Вектор результирующего поля плавно поворачивается против часовой стрелки. Если завершить построение точкой ωt=2π, то увидим, что результирующий вектор поля совершил полный оборот и пришел в исходное положение. Далее цикл вращения поля повторяется. Таким образом, за один временной период изменения тока Т=1/f вектор магнитного поля совершает полный оборот в пространстве. Следовательно, частота вращения поля в рассматриваемом примере может быть определена, как
n1=1/Т=f1(об/сек)=60f1(об/мин) (3.3)
В рассмотренном примере каждая фаза представлена одной катушкой, образующей двухполюсное поле. Для получения меньшей частоты вращения поля обмотку выполняют с большим числом полюсов. Для этого каждая фаза должна иметь «р» комплектов катушек, образующих совместно «р»- полюсное поле. В этом случае за один период изменения тока вектор магнитного поля поворачивается на пространственный угол 360о/p. Поэтому в общем случае частоту вращения магнитного поля (об/мин) определяют выражением
n1=60f1/p (3.4)
Аналогичные построения можно проделать и для двухфазной системы токов и обмоток, где пространственный угол сдвига обмоток и временной угол сдвига токов должны быть приняты 90о. Из всех построений важно сделать вывод, что вращающееся поле будет круговым, если модуль вектора результирующего поля при его повороте будет оставаться постоянным. Если в одной из фаз ток достигает максимального значения (Im), то направление вектора результирующего поля в этот момент будет совпадать с осью этой фазы. Изменение направления вращения магнитного поля статора достигается изменением порядка следования фаз тока. Для этого достаточно поменять местами два провода, идущие от источника электрической энергии к обмотке электродвигателя. Обобщая изложенное, сформулируем условия получения кругового вращающегося поля в многофазной системе: симметричное расположение фаз обмотки статора по его окружности; фазы обмотки статора должны иметь одинаковые геометрические и электрические параметры; временной сдвиг токов в фазах должен быть равен пространственному сдвигу осей обмоток; синусоидальность изменения тока во времени и распределения магнитного поля вдоль окружности расточки статора. При невыполнении хотя бы одного из перечисленных условий магнитное поле статора, продолжая оставаться вращающимся, становится эллиптическим. Эти значит, что вектор результирующего поля во время вращения не остается постоянным по величине. Поэтому он вращается неравномерно, ускоряясь или замедляясь (ω = var) и своим концом описывает эллипс. Это показано на рис. 3.8. Здесь Фm.кр – вектор магнитного потока кругового поля, Фm.эл – вектор магнитного потока эллиптического поля. При более глубоком изучении эллиптического поля его условно представляют в виде двух составляющих полей, вращающихся в противоположные стороны: прямо вращающейся и обратно вращающейся. Обратное поле ухудшает характеристики машины.
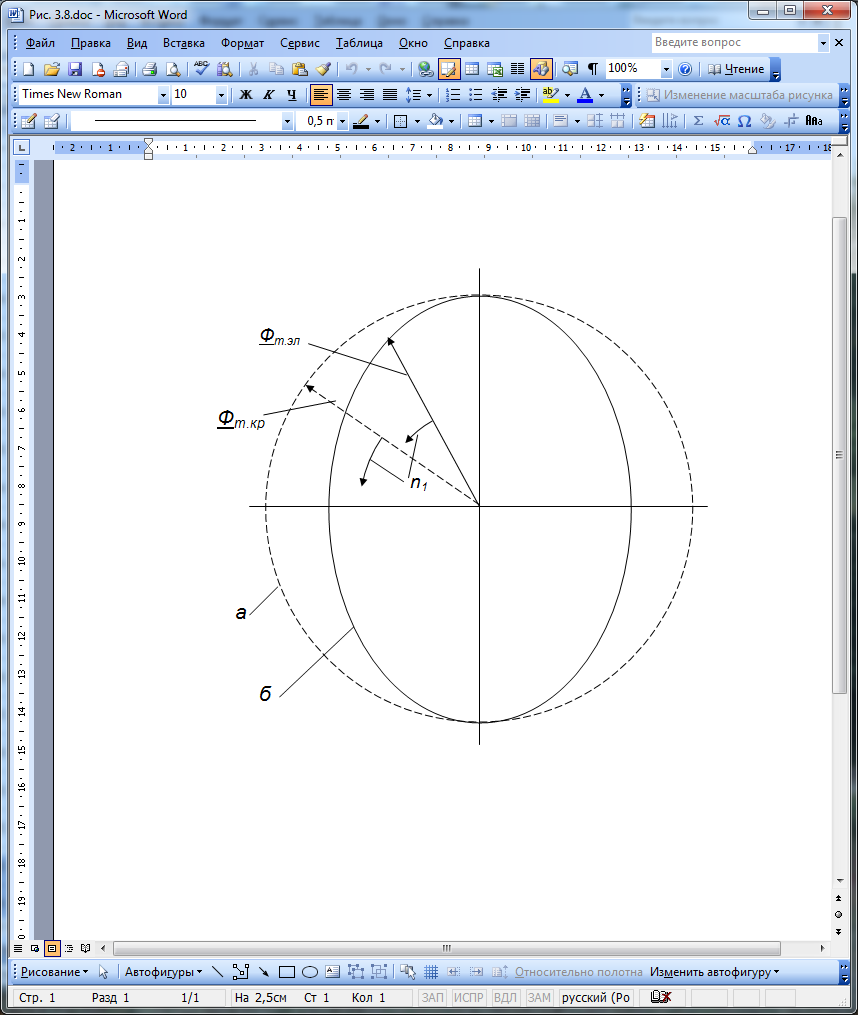
Рис.3.8. Сравнение кругового (а) и эллиптического (б) вращающихся магнитных полей.
2.4. Обмотка статора асинхронной машины
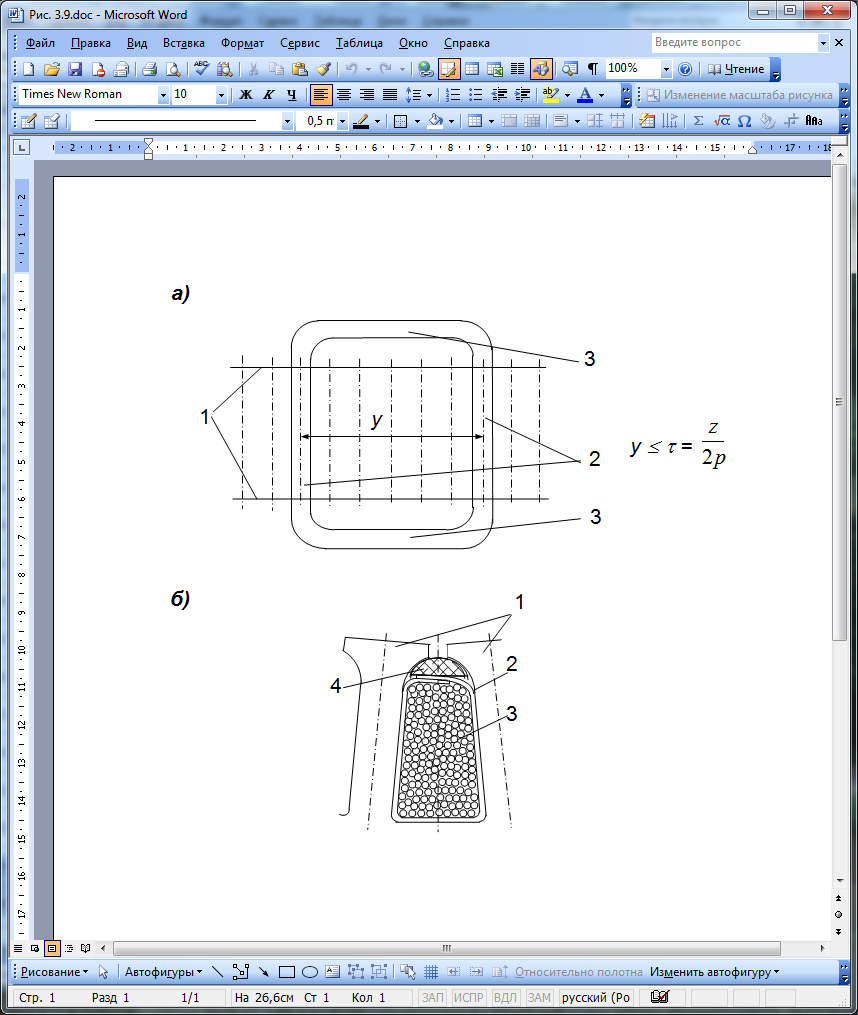
Вращающееся поле в асинхронном электродвигателе создается обмоткой статора. Для решения этой задачи обмотка выполняется, как уже отмечалось, многофазной (m фаз), причем фазы состоят из одинакового числа катушек и их оси повернуты друг относительно друга на угол α=360о/m. В большинстве асинхронных электродвигателей m=3. Поскольку все фазы обмотки одинаковы, рассмотрим устройство любой из них. Отдельная фаза обмотки может содержать одну, две, три или больше катушек. Это зависит от числа полюсов магнитного поля, создаваемого этой фазой, а также - от числа пазов (zc) на внутренней поверхности статорного магнитопровода. Стремясь приблизить распределение индукции поля к синусоидальной форме, разработчики асинхронных машин стараются предусмотреть на статоре максимальное число пазов, их число ограничивается только требованиями технологичности конструкции. При меньшем числе пазов обмотку выполнить легче. Элементы пазовой обмотки показаны на рис. 3.9а. Здесь: 1 - торцевые границы магнитопровода; 2 - пазовые (активные) части катушки; 3 - лобовые части, здесь проводники переходят из паза в паз, образуя витки катушки. Оси пазов показаны штрих-пунктирными линиями. Пазовая часть катушки в поперечном сечении показана на рис. 3.9б). Здесь изображены два зубца 1, между которыми образован полузакрытый паз.
Пазовая коробочка 2, выполненная из изоляционного материала, предотвращает замыкание проводников 3 обмотки на магнитопровод. Клин 4 закрепляет проводники и пазовую коробочку, предотвращая их смещения относительно стенок паза. Пазы, в которых размещены активные части катушки, разделены шагом по пазам “у” (см. 3.7а). Удобнее этот параметр исчислять числом пазов. шаг “у” не должен превышать полюсного деления обмотки:
y
=
![]() (3.5)
(3.5)
где : z - число пазов; 2р - число полюсов. Обычно шаг по пазам меньше величины полюсного деления τ. стремятся обмотки выполнять так, чтобы у ≈ 0,8τ.
![]()
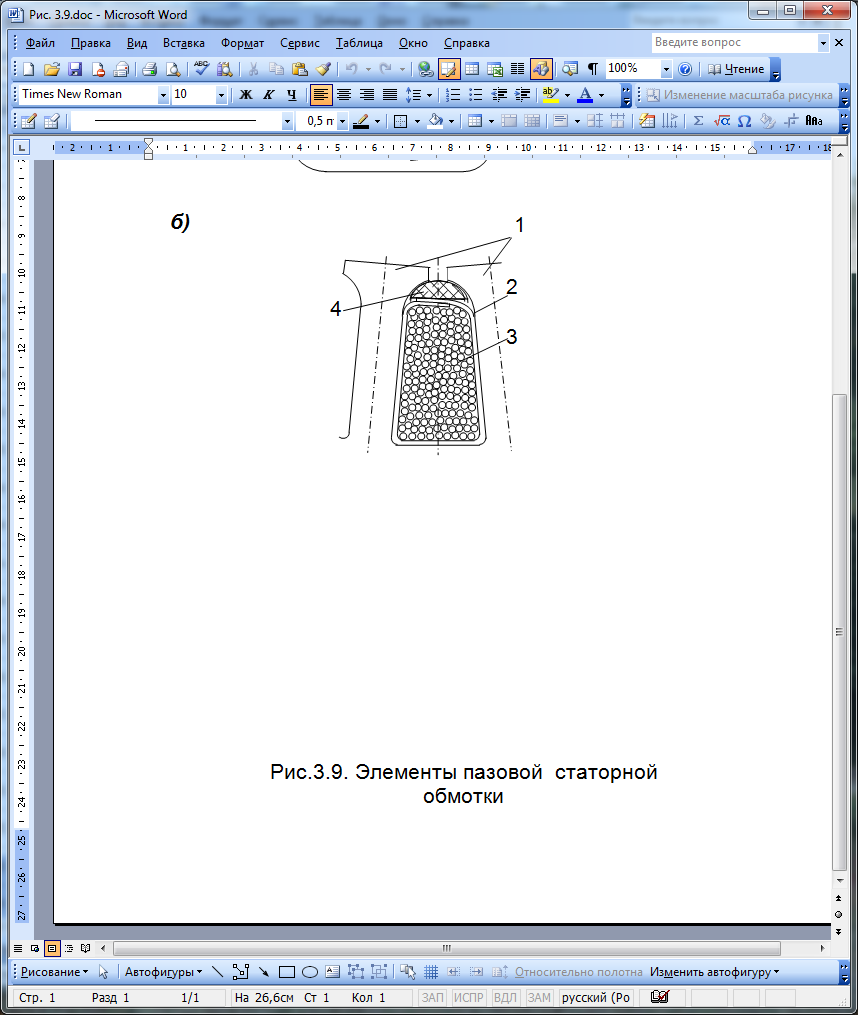
Рис.3.9. Элементы пазовой статорной обмотки
Поэтому такие обмотки называют обмотками с укороченным шагом. Это делается для приближения формы кривой магнитного поля, создаваемого всеми катушками обмотки, к синусоидальной. Если же шаг обмотки по пазам будет равен полюсному делению, то такой шаг называют диаметральным. Приближение кривой поля к синусоидальной решается еще полнее, если полюс образуется несколькими катушками, сдвинутыми друг относительно друга на зубцовое деление. В таких случаях обмотку считают “распределенной”. Степень распределения обмотки определяется числом пазов, приходящихся на полюс и фазу:
q
=
![]() (3.6)
(3.6)
Число пазов на полюс и фазу колеблется в пределах от 1 до 5 и может быть дробным. Это значит, что разноименные полюса одной фазы образуются различным числом катушек. Например, если q = 2,5, то на полюса в одной фазе приходится поочередно 2 или 3 полные катушки. Степень укорочения и распределения обмотки оценивается коэффициентами укорочения и распределения:
Ку = Sin(![]() );
Кр =
);
Кр =
 (3.7)
(3.7)
где: - угол фазной зоны. В различного рода расчетах используют обобщенный параметр, называемый обмоточным коэффициентом.
Коб=Ку*Кр 1, (3.8)
его величина всегда учитывается наряду с числом витков обмотки при определении индуктируемых в них эдс с учетом закона электромагнитной индукции. Статорные обмотки различаются между собой формой и размером катушек, числом сторон катушек в одном пазу, шагом по пазам, устройством лобовых частей и др. Наиболее часто в встречаются три типа трехфазных обмоток: однослойная концентрическая, однослойная и двухслойная равнокатушечные. Принципиальные схемы таких обмоток показаны на рис. 3.10. На этих схемах указаны номера пазов (1…24), начала (А;В и С) и концы (X;Y и Z) фаз, а также – соединения катушек, обеспечивающие заданное число полюсов (2р=4). Во всех вариантах для наглядности фаза А выделена более жирной линией Концентрическая обмотка (рис. 3 8а) имеет катушки разной величины, в пределах отдельного полюса они располагаются концентрично друг относительно друга. Равнокатушечные обмотки в однослойном исполнении (рис. 3.10б) нередко называют «цепными». Они более технологичны (все катушки одинаковы по форме и размерам), но их выполнение возможно только при определенном сочетании чисел полюсов и пазов статора. Двухслойные равнокатушечные обмотки (рис. 3.10в) могут применяться более широко, но являются более трудоемкими. В этих обмотках каждый паз содержит активные стороны двух катушек, причем, сторона одной кадушки укладывается на дно паза (нижний слой), а второй – сверху (верхний слой). Стороны, укладываемые на дно паза, показаны пунктиром. Между слоями закладывается полоска межслойной изоляции. На рис. 3.11 изображены формы лобовых частей однослойных обмоток. Здесь видно, что в концентрических обмотках лобовые части приходится размещать в двух плоскостях, как показано на рис. 3.11а справа. Поэтому они более объемны. Это связано с тем, что катушечным группам приходится придавать разные размеры (см. рис. 3.10а). В цепной обмотке катушки одинаковы по размерам, но их укладка в пазы усложнена, что следует из формы лобовых частей (рис. 3.1б). Наиболее сложны в изготовлении двухслойные обмотки, поэтому их применение оправдано только в крупных машинах. Важным элементом любой обмотки является её изоляция. Разделяют изоляцию пазовую и витковую. Пазовая изоляция выполняется в виде коробочки, которую закладывают в пазы перед укладкой обмотки. Коробочку 2 закрывают и закрепляют клином 4, как показано на рис. 3.9б. Витковая изоляция обеспечивается применением для обмоток готового изолированного провода.

Рис. 3.10. Принципиальные схемы обмоток
асинхронных машин: а) Схема трехфазной однослойной концентрической обмотки ( z=24, 2p=4, q=2 ); б) Схема трехфазной однослойной равнокатушечной (цепной) обмотки ( z=24, 2p=4, q=2); в) Схема трехфазной двухслойной равнокатушечной обмотки (z = 24, 2p = 4, q = 2).
В машинах с номинальным напряжением выше 600В используется усиленная изоляция.
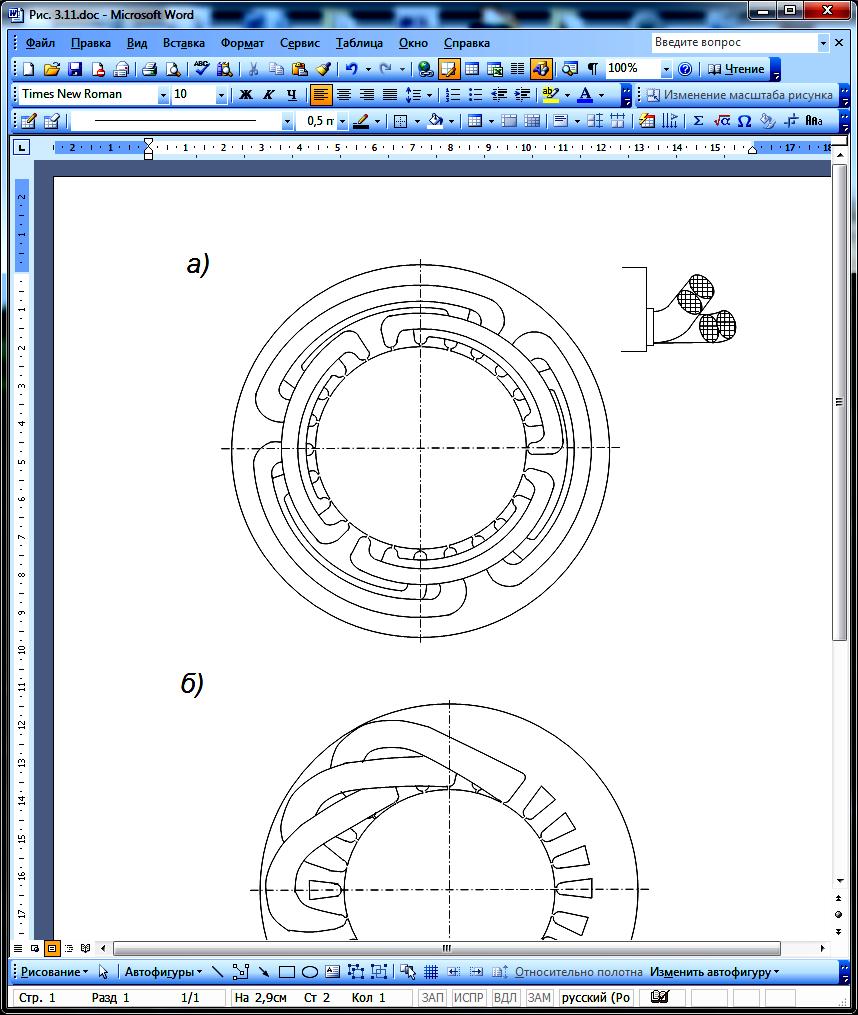
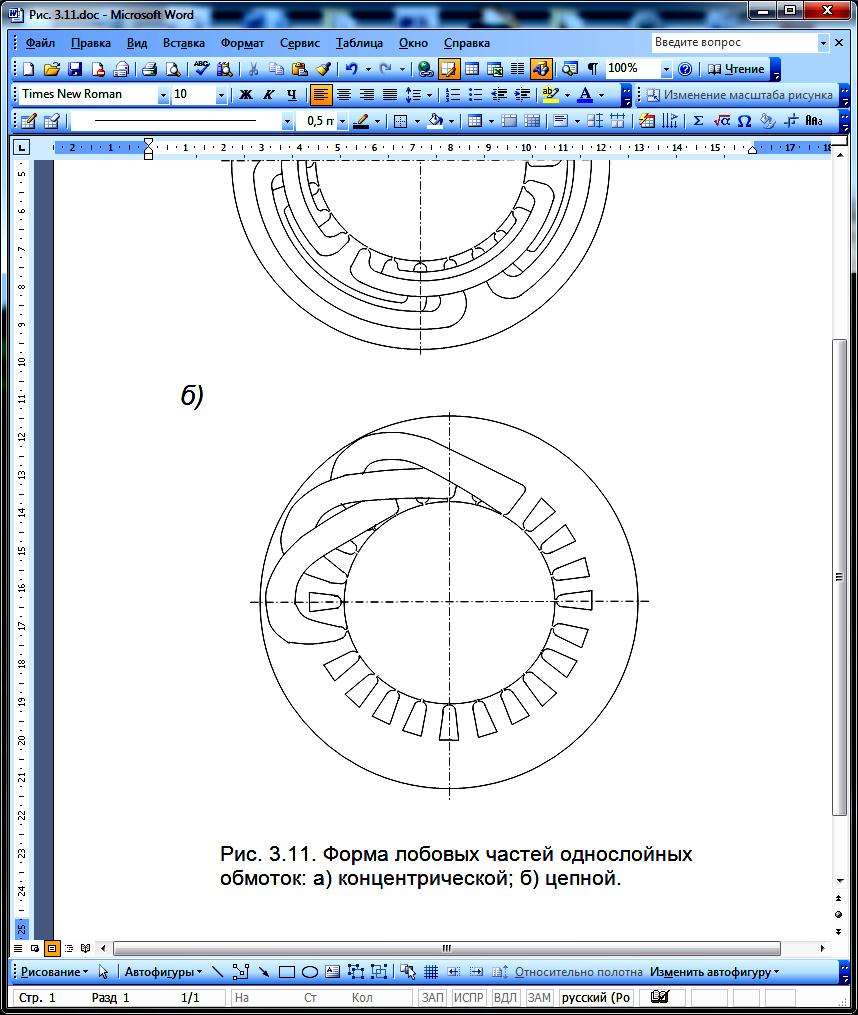
Рис.3.11. Форма лобовых частей однослойных обмоток:
а) концентрической; б) цепной
При выборе материала изоляции принимается во внимание её нагревостойкость, которая определяется предельно допустимой или расчетной температурой нагрева при сохранении изоляционных характеристик. В зависимости от этого изоляцию разделяют на классы: А, Е и В - +75оС; F и H - +115оС. Указанные классы различаются еще по предельно допустимой нагревостойкости. В качестве изоляции используют эмалевую пленку, синтетическую пленку, пленкокартон, слюдопластовую ленту, стекловолокно и др. Повреждение изоляции приводит к замыканию обмотки на корпус или между витками. Замыкание на корпус можно выявить с помощью мегомметра, измерив сопротивление изоляции между обмоткой и корпусом. Витковое замыкание выявить сложнее. Наилучший результат дает использование специального контрольного «башмака». Суть опыта показана на рис. 3.12.
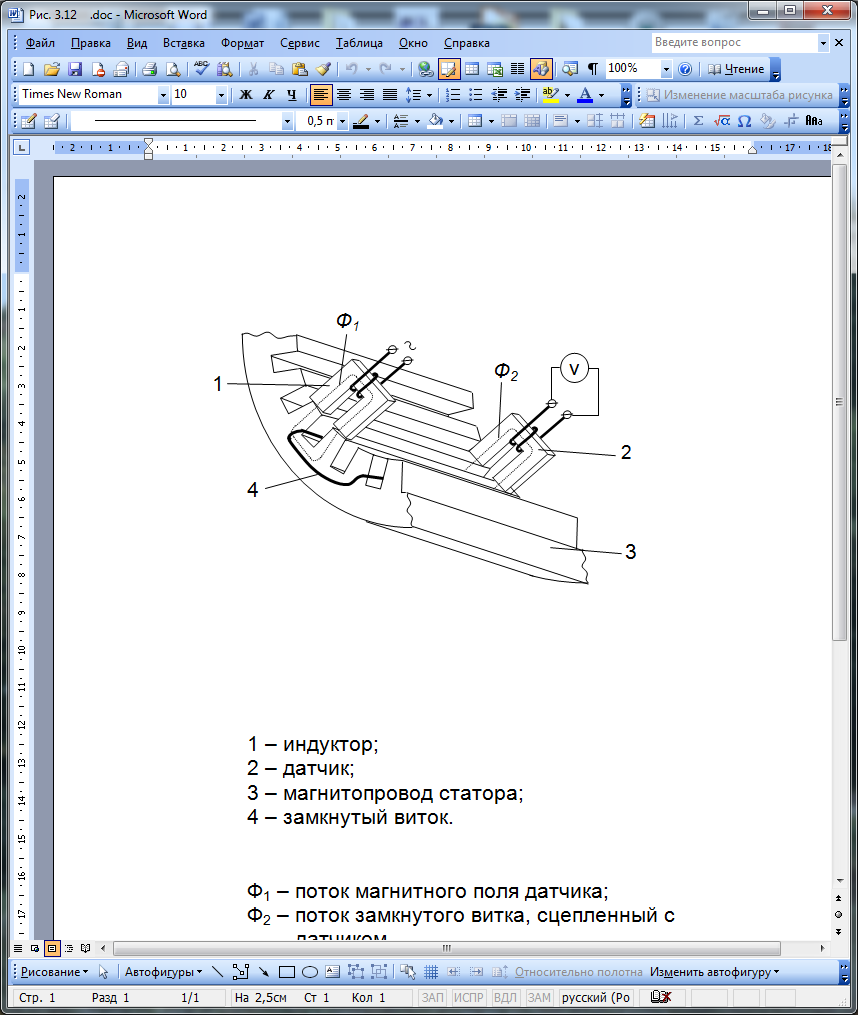
1 – индуктор; 2 – датчик; 3 – магнитопровод статора; 4 – замкнутый виток. |
Ф1 – поток магнитного поля датчика; Ф2 – поток замкнутого витка, сцепленный с датчиком. |
Рис.3.12. Принцип работы «башмака» для
выявления виткового замыкания.
В теле (не показано) башмака закреплены индуктор 1 и датчик 2. По устройству они идентичны и каждый содержит магнитопровод с катушкой. Индуктор и датчик прижимают к двум соседним зубцам статорного магнитопровода 3, как показано на рисунке. Обмотку датчика 1 подключают к источнику переменного тока, поэтому она создает пульсирующее магнитное поле Ф1. Это поле пронизывает витки статорной обмотки, проводники которых находятся в контролируемом пазу. В этих витках наводится некоторая ЭДС. Если хотя бы один из этих витков имеет поврежденную витковую изоляцию, возникнет замкнутый контур (виток) 4, в котором наведенная потоком Ф1 ЭДС вызовет переменный ток. Этот ток создаст свое переменное поле, часть которого Ф2 замкнется по магнитопроводу датчика 2 и наведет в его обмотке ЭДС. Последняя измеряется прибором V. Таким образом, наличие замкнутого витка в исследуемом пазу подтверждается отклонением стрелки прибора V. Последовательно проверяют все пазы. При изготовлении обмоток стремятся, чтобы изоляция в пазу занимала меньше места. Для оценки этого используется специальный показатель – коэффициент заполнения паза изолированными проводниками:
kзап=Nп1d2из/Sп1 (3.9)
где: Nп1 – число проводников в пазу; dиз – диаметр изолированного провода; Sп1 – площадь паза. При ручной укладе обмотки коэффициент заполнения лежит в пределах 0,7÷0,75. В высоковольтных машинах пазы статора выполняют открытыми, что облегчает выполнение надежной пазовой изоляции. Полезно знать, что открытие паза отрицательно влияет на энергетические параметры машины, поэтому его делают минимальным, руководствуясь исключительно технологическими соображениями.
2.5. Обмотки ротора асинхронной машины
Роторы асинхронных машин бывают двух видов: с короткозамкнутой или фазной обмотками. Магнитопровод ротора в этом случае выполняют из листов электротехнической стали, которые, как правило, не изолируют друг от друга. В листах выштамповывают пазы для размещения обмотки. В центре листа имеется отверстие для вала. В фазных роторах обмотку выполняют по аналогии со статорной обмоткой. Число полюсов статорной и фазной роторной обмотки должно быть одинаковым. Фазную обмотку соединяют «звездой» и концы выводят на контактные кольца. На кольца накладывают щетки, что позволяет включать в цепь роторной обмотки регулировочных реостат. Это делается для повышения пускового момента или регулировки скорости вращения ротора. В качестве фазных роторных обмоток обычно используют концентрические однослойные обмотки. В асинхронных машинах широко используются короткозамкнутые роторные обмотки. В таком роторе обмотка выполнена в виде так называемой «беличьей клетки». Её конфигурация вне магнитопровода показана на рис. 3.13а. Обмотка состоит из стержней 1 (по числу пазов ротора) и двух короткозамыкающих колец 2. Последние накоротко соединяют концы стержней между собой, как показано на рисунке. На рис. 3.13б показан короткозамкнутый ротор в собранном состоянии. Здесь показан магнитопровод 1 с пазами, в которых находятся стержни «беличьей клетки». Магнитопровод имеет осевое отверстие 2 под вал. На торцах магнитопровода показаны короткозамыкающие кольца 3. «Беличья клетка» в асинхронных машинах может иметь два принципиально отличающиеся исполнения: литое и сборное. Литое исполнение предусматривает получение «беличьей клетки» путем заливки пазов расплавленным алюминием с одновременным образованием короткозамыкающих колец и стержней. В силу простоты и дешевизны технологической операции такое исполнение встречается в большинстве асинхронных машин.
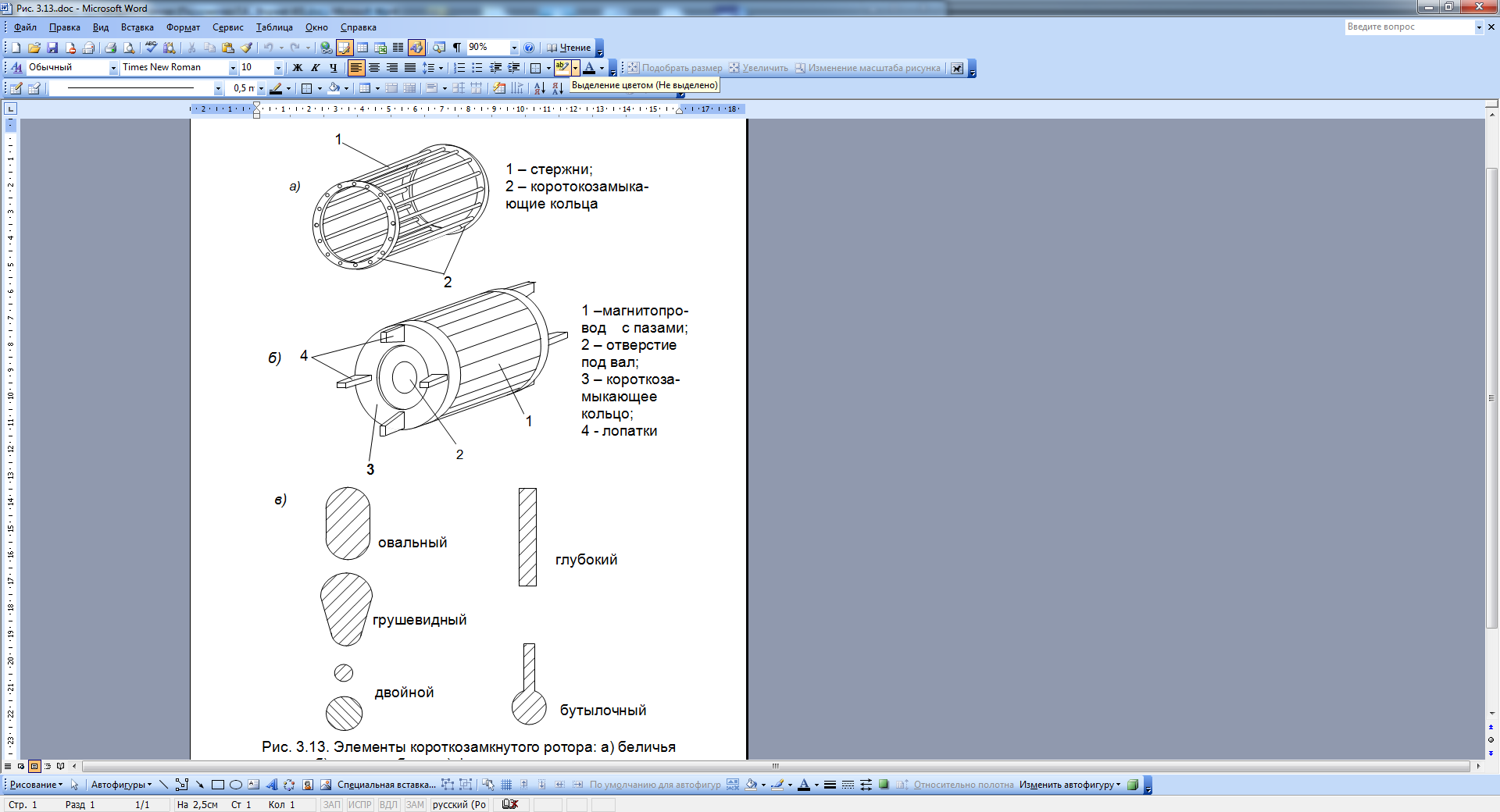
Рис. 3.13. Элементы короткозамкнутого ротора:
a) беличья клетка; б) ротор в сборе; в) формы паза
В отдельных случаях, стремясь получить минимальное скольжение при нагрузке, максимальный КПД или пусковой момент, «беличью клетку» собирают из отдельных деталей (медных, латунных, железных или др.). Соединение стержней с кольцами обеспечивается при этом пайкой или сваркой. Исполнения «беличьей клетки» различаются также по форме сечения стержней: овальная, грушевидная, глубокопазная, бутылочная, двойная и др. Формы таких сечений показаны на рис. 3.13в. В специальных исполнениях асинхронных электродвигателей применяют так называемый массивный ротор, в котором проводники «беличьей клетки совмещены с магнитопроводом ротора. Такой ротор имеет вид стальной болванки без явно выраженной короткозамкнутой обмотки. В системах автоматики применяются асинхронные управляемые двигатели с полым ротором. Ротор такого двигателя имеет вид полого стакана, выполненного из стали, латуни или алюминия. Такое решение позволяет повысить быстродействие электродвигателя.
2.6. Свойства асинхронного электродвигателя
при неподвижном роторе
Режим асинхронного двигателя при неподвижном роторе может иметь место в двух случаях: в момент пуска (когда напряжение на обмотку статора уже подано, но ротор еще не стронулся с места) и когда ротор заторможен внешними силами. При этом асинхронный двигатель представляет собой, по существу, обычный трансформатор, у которого первичной является обмотка статора, а вторичной – обмотка ротора. Поэтому электромагнитные процессы в машине и описывающие их уравнения будут такими же, как и в трансформаторе. Вторичная (роторная) обмотка двигателя обычно замкнута накоротко, поэтому такой режим часто называют режимом короткого замыкания. Проверку двигателя в этом режиме следует проводить при пониженном напряжении питания. Под действием напряжения U1, приложенного к статорной обмотке, в фазах последней будет протекать ток I1, создающий вращающееся магнитное поле с потоком Фm. Это поле при вращении пересекает проводники статорной и роторной обмоток с одинаковой частотой f1 и индуктирует в них соответствующие ЭДС:
E1=4,44 f1Фmw1Коб1 и E2=4,44 f1Фmw2Коб2 (3.10)
где: Коб1 и Коб2 – обмоточные коэффициенты статора и ротора. Если взять отношение этих ЭДС, получим коэффициент трансформации двигателя:
E1/E2=(w1Kоб1)/(w2Kоб2)=КЕ (3.11)
При определении коэффициентов трансформации КЕ и приведения Кi для роторной обмотки «беличья клетка» обычно принимают: w2=0,5; m2=Z2 (Z2 - число пазов ротора) и Коб2=1. По действием ЭДС Е2 в проводниках ротора возникают токи
I2= E2/(r2+jx2), (3.12)
где: r2 – активное сопротивление обмотки ротора; x2 – индуктивное сопротивления рассеяния обмотки ротора. Фазы роторной обмотки смещены в пространстве друг относительно друга, поэтому протекающие в них токи смещены друг относительно друга во времени. Поэтому токи ротора создают свое вращающееся поле. Поскольку частота токов в роторе и в статоре при неподвижном роторе одинаковая, то поля статора и ротора вращаются с равными скоростями и неподвижны друг относительно друга. Взаимодействуя между собой, эти поля обеспечивают передачу энергии от статора к ротору. В связи с изложенным для асинхронного двигателя с неподвижным ротором оказываются справедливыми уравнения электрического равновесия трансформатора:
U1=-Е1+I1r1+jI1x1
0 =E'2 – I'2r'2 – jI'2x'2 (3.13)
I1=Io+(-I'2)
В этих уравнениях: r1 – активное сопротивление статорной обмотки; x1 – индуктивное сопротивление рассеяния статорной обмотки. Черточки под символами выделяют векторные величины. Наличие штриха указывает на то, что параметры вторичного контура (обмотки ротора) приведены к первичному контуру (обмотке статора), как это делалось в трансформаторе. Ток Io в выражении (3.13) – это намагничивающий ток. Он практически равен току холостого хода, потребляемому двигателем при вращении ротора без механической нагрузки на валу. В асинхронных двигателях этот ток больше, чем в трансформаторах, и составляет Io=0,2…0,4Iном. Его реактивная составляющая обеспечивает создание магнитного поля статора, что в асинхронном двигателе сделать труднее из-за наличия воздушного зазора между ротором и статором. Как и в трансформаторе, результирующее поле в асинхронном двигателе создается совместным действием МДС обмоток статора и ротора и остается практически неизменным независимо от режима его работы. Режим работы асинхронной машины с заторможенным ротором используется для регулирования фазы (фазорегулятор) выходного напряжения. Для решения этой задачи может использоваться любая асинхронная машина с фазным ротором. На её валу устанавливают червячное колесо, а на корпусе (или на подшипниковом щите – червяк. Такое устройство позволяет плавно поворачивать ротор по или против направления вращения поля статора. Вначале нужно выставить ротор в положение, когда сдвиг ЭДС в роторной обмотке относительно напряжения на зажимах одноименной фаза статорной обмотки будет равен нулю. Если далее поворачивать ротор по направлению вращения поля статора, то ЭДС в роторной обмотке будет отставать во времени от напряжения в на зажимах обмотки статора. Если же ротор поворачивать навстречу вращению поля статора, ЭДС в обмотке ротора будет иметь опережающий фазный угол. Это же устройство можно использовать и для плавной регулировки амплитуды выходного напряжения U2 (индукционный регулятор). Для этого обмотки машины соединяют по схемам, представленным на рис. 3.14 а и б.
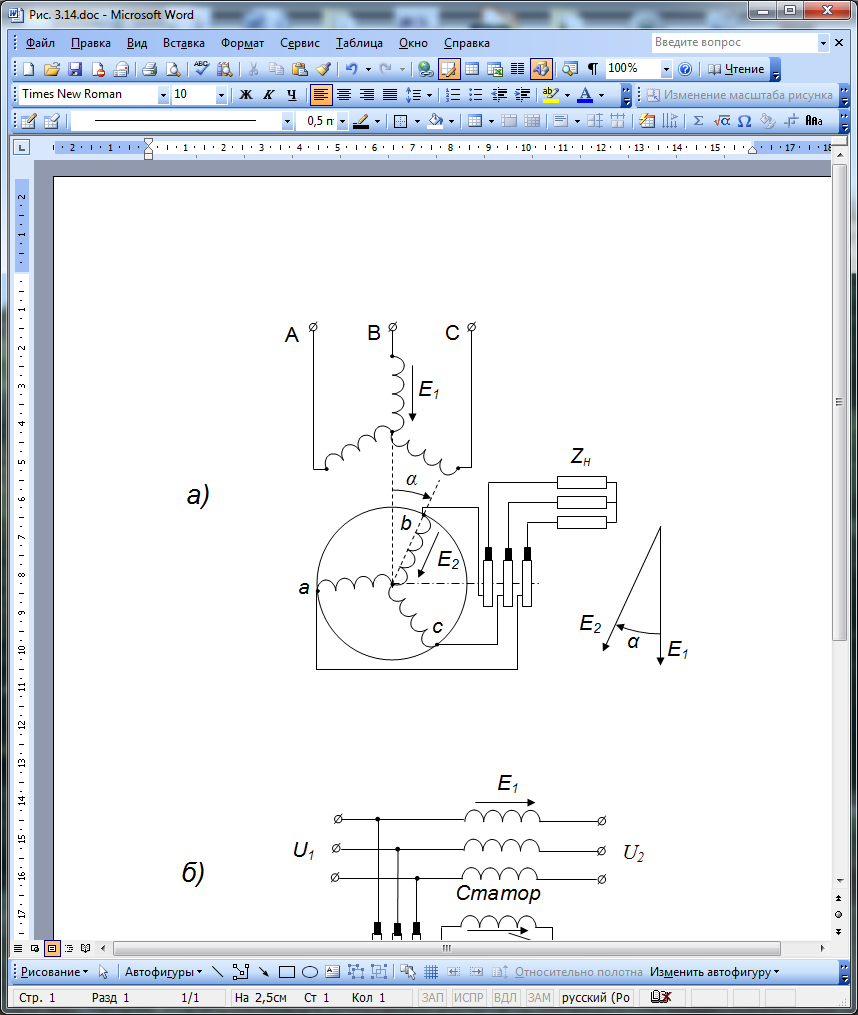

Рис.3.14. Принципиальная схема фазорегулятора (а)
и индукционного регулятора (б).
Режим работы асинхронной машины с заторможенным ротором применяется также для получения регулируемого многофазного индуктивного сопротивления, используемого в специальных электроприводах. Опыт короткого замыкания проводится также при испытаниях машины.
2.7. Работа асинхронной машины
при вращающемся роторе
Ранее было показано, что в асинхронном двигателе частота вращения ротора n2 всегда меньше частоты вращения магнитного поля статора n1. Поэтому несложно определить частоту, с которой магнитное поле статора пересекает проводники обмотки ротора: ns = n1 - n2. Отсюда находим частоту ЭДС,
индуктируемой в обмотке ротора.:
f2= p(n1 – n2)/60 = f1 S (3.14)
При работе двигателя в номинальном режиме его скольжение лежит в пределах S = 0,02…0,07, откуда следует, что частота эДС и тока в роторной обмотке низкая: f2 = 1,0…3,5 Гц. Как следует из (3.10), ЭДС в роторной обмотке должна быт пропорциональна его скольжению:
E2s=E2S (3.15)
Вращающееся магнитное поле ротора, создаваемое протекающими в его обмотке токами, имеет частоту вращения относительно ротора n2s= n1 S и относительно статора:
n2+n2s= n1(1 – S) + n1S = n1 (3.16)
Следовательно, при вращающемся роторе магнитные поля статора и ротора вращаются в одном направлении с одинаковой скоростью и поэтому неподвижны друг относительно друга. Суммируясь, они создают результирующее магнитное поле, которое и обеспечивает передачу энергии от статора к ротору. Если к валу приложить нагрузку в виде механического момента, направленного навстречу его вращения, то это вызовет увеличение скольжения s, а следовательно – к увеличению ЭДС Е2 и тока I2. Поскольку токи ротора, как и токи вторичной обмотки трансформатора, оказывают размагничивающее действие на магнитную систему машины, увеличение нагрузки на валу приведет к увеличению тока I1, потребляемого статором из сети. Баланс токов в статорной и роторной обмотках при вращающемся роторе описывается третьим равенством в (3.13). Это равенство показывает, что увеличение потребляемого тока при нагрузке происходит из-за увеличения тока ротора. Таким образом, двигатель потребляет от источника электрическую мощность, которая преобразовывается им в механическую мощность, снимаемую с вала рабочим механизмом. Это преобразование энергии сопровождается её потерями. Распределение потребляемой мощности легко описывается уравнением энергетического баланса:
P1=ΔPэ1+ ΔPм1+ ΔPэ2+ ΔPмех+ ΔPдоб+Р2 (3.17)
где: Р1=m1U1I1Cosφ1 –электрическая мощность, подводимая к статору от источника;.Р2 - механическая мощность, отбираемая с вала рабочим механизмом. Эти величины принято называть соответственно потребляемой (Р1) и полезной (Р2) мощностью. Остальные составляющие правой части (3.17) представляют собой различные виды потерь мощности: ΔPэ1 – потери на нагрев проводников статорной обмотки протекающими по ним токами; ΔPм1 = потери мощности, связанные с вихревыми токами перемагничиванием магнитопровода статора вращающимся магнитным полем; ΔPэ2=РэмS– электрические потери мощности в обмотке ротора; ΔPмех – механические потери мощности, обусловленные трением в подшипниках и перемешиванием воздуха вращающимся ротором; ΔPдоб – трудно учитываемые добавочные потери мощности, связанные с полями рассеяния, высшими гармониками поля и др. Величину добавочных потерь обычно принимают равными ΔPдоб ≈ 0,005Р1ном. Уравнение (3.17) для наглядности удобно представлять в виде энергетической диаграммы (рис. 3.15).
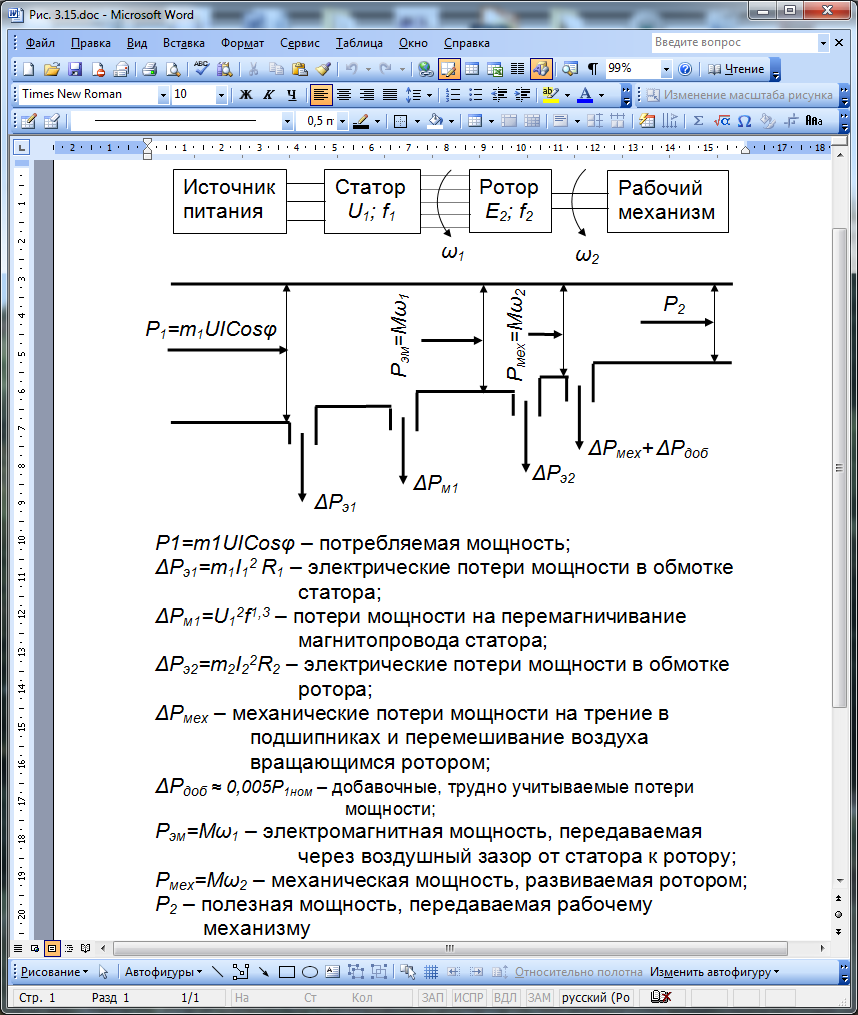
Рис.3.15. Энергетическая диаграмма
асинхронного электродвигателя
Эта диаграмма дает представление о распределении мощности в электромеханической системе, состоящей их источника питания, асинхронного электродвигателя и рабочего механизма. Здесь также показано, что потребляемая статором мощность Р1 за вычетом потерь в статоре в виде электромагнитной мощности Рэм=P1 – (Pм+Pэ1), которая через воздушный зазор между статором и ротором поступает в ротор. Далее, за вычетом потерь в обмотке ротора получаем механическую мощность Pмех=Мω2, которую ротор передает на вал двигателя. За вычетом механических и добавочных потерь получаем полезную мощность Р2, которую рабочий механизм получает с вала электродвигателя. . В практических расчетах по величине полезной номинальной мощности приближенно определяют номинальный момент двигателя Мном=9,55Рном/nном. Из изложенного выше следует, что коэффициент полезного действия двигателя равен:
η = Р2/ Р1=1-ΣΔ Р/ Р1 (3.18)
где: ΣΔ Р – суммарные потери мощности в двигателе. Характер изменения КПД в асинхронном двигателе практически такой же, как и в трансформаторе (см. рис. 3.16).
При увеличении нагрузки от нуля КПД машины вначале быстро растет и достигает максимума обычно при Р2=(0,7÷0,8) Р2ном. При дальнейшем росте нагрузки КПД падает и при перегрузке его падение ускоряется. В двигателях общего применения мощностью до 10 кВт при номинальной нагрузке значение КПД лежит в пределах η= 0,75÷0,8. В двигателях большой мощности он достигает η= 0,9÷0,94. КПД является одним из основных эксплуатационных показателей двигателя.

![]()
![]()
Рис.3.16. Зависимость КПД асинхронного двигателя
от нагрузки
2.8. Особенности приведения параметров обмотки ротора
и векторная диаграмма асинхронного двигателя
Анализ процессов, происходящих в машине переменного тока, значительно упрощается, если воспользоваться построением векторной диаграммы токов и напряжений, действующих в её отдельных контурах. Из опыта анализа трансформатора известно, что если рассматриваемые контура электрически не соединены, то их параметры необходимо привести к одному из контуров: к обмотке, подключаемой к источнику. В асинхронном двигателе с этой целью параметры роторной обмотки приводят к обмотке статора. При этом подразумевается, что роторная обмотка имеет число фаз m2 , обмоточный коэффициент kоб2 и число витков в фазе w2. В случае короткозамкнутого ротора принимают m2=Z2 и w2=0,5. Пересчет реальных параметров обмотки ротора к их приведенным значениям производится по формулам, аналогичным формулам приведения параметров вторичной обмотки трансформатора, но только с учетом обмоточных коэффициентов статорной и роторной обмоток при S=1,0:
E'2=E2ke и I'2=I2/ki (3.19)
где: ke=E1/E2=kоб1w1/(kоб2w2) – коэффициент трансформации напряжения в асинхронной машине при неподвижном роторе; ki=m1w1kоб1/(m2w2kоб2)=m1ke/m2 – коэффициент трансформации тока. Следует обратить внимание, что в асинхронной машине коэффициенты трансформации ЭДС и тока не равны между собой, как это имеет место в трансформаторе. Объясняется это тем, что в отличие от трансформаторов в асинхронной машине число фаз на статоре (первичный контур) и роторе (вторичный контур) в общем случае различно (m1≠m2). Приведение активного и реактивного сопротивлений ротора производится по формулам:
r'2=r2keki; x'2=x2keki (3.20)
Тогда, с учетом полученных выражений для приведенных параметров, уравнение равновесия напряжений во вторичном контуре примет вид:
E'2 - jI'2x'2 - I'2r'2/S=0 (3.21)
Которое несложно чисто математически привести к виду:
0= E'2 - jI'2x'2 - I'2r'2 - I'2r'2(1 – S)/S (3.22)
Руководствуясь теми же соображениями, что и для трансформатора, а также системой уравнений (3.13), но с учетом равенства (3.22) для вторичного контура, строим векторную диаграмму асинхронного двигателя (Рис. 3.17).
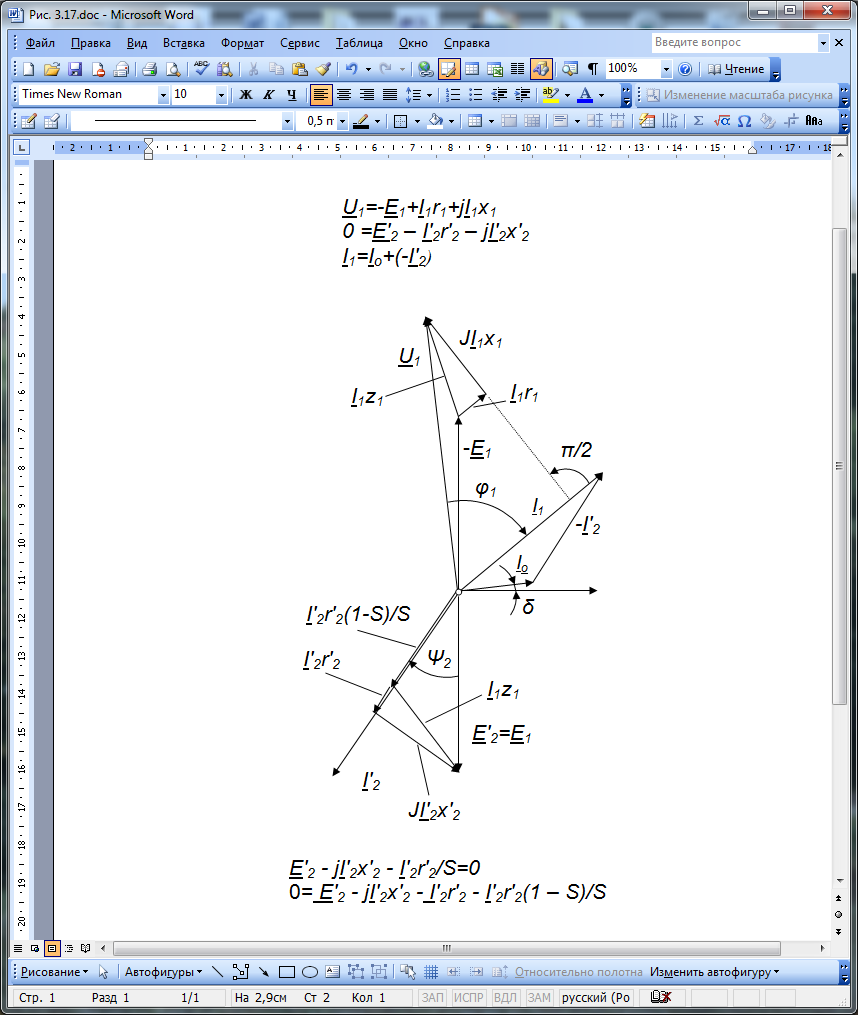
Рис.3.17. Векторная диаграмма асинхронного двигателя
На этой диаграмме ψ2=arc tg (x'2S/ r'2) – угол сдвига фаз между векторами ЭДС Е'2 и тока I'2. Пользуясь формулой (3.10), определяем ЭДС Е1=Е'2 и откладываем вектор ЭДС от точки «0» вниз по вертикальной оси. Далее вектор –Е1 откладываем от этой же точки вверх. Определив по (3.12) ток I'2, изображаем соответствующим ему вектор I'2, предусмотрев его отставание от вектора E'2 на угол ψ2. Далее в сторону опережения на угол π/2 от вектора ЭДС строим вектор основного магнитного потока Фm, относительно которого в сторону опережения на угол δ (потери холостого хода) строим вектор тока холостого хода Io. Сложив с последним вектор I'2, строим суммарный вектор I1, изображающий ток в обмотке статора согласно третьему равенству (3.13). Векторы падений напряжения на активном (I1r1) и индуктивном (jI1x1) сопротивлениях статорной обмотки строим, ориентируя их относительно вектора тока I1, как это делали при построении векторной диаграммы трансформатора. Суммарный вектор U1 изображает напряжение источника, приложенное к статорной обмотке. Находим угол φ отставания тока I1 от напряжения U1. В таком же порядке строим многоугольник напряжений вторичного контура согласно (3.22). Построенная диаграмма отличается от векторной диаграммы трансформатора тем, что сумма падений напряжения во вторичном контуре (в обмотке ротора) только ЭДС Е'2 в этом контуре, так как обмотка ротора замкнута накоротко. Если падение напряжения, выраженное на диаграмме в виде I'2r'2(1-S)/S рассматривать, как падение напряжения на некоторой активной нагрузке r'2(1-S)/S, подключенной на зажимы вторичного контура, то векторную диаграмму асинхронного двигателя можно рассматривать как векторную диаграмму трансформатора, у которого на зажимы вторичной обмотки подключена нагрузка r'2(1-S)/S. Другими словами, асинхронный двигатель в электрическом отношении подобен трансформатору, работающему на чисто активную нагрузку. Активная мощность, снимаемая со вторичной обмотки, представляет собой полную механическую мощность, развиваемую асинхронным двигателем. Её легко рассчитать по формуле
Р'2=m1I'22r'2(1-S)/S (3.23)
Воспользовавшись построенной векторной диаграммой, можно рассчитать приведенный ток во вторичном контуре:
I'2=U1/√[r1+ r'2+ r'2/S]2+(x1+ x'2)2 (3.24)
Зная вторичный ток, можем легко определить вращающий момент двигателя, как будет показано ниже. Изменение нагрузки двигателя от нуля до некоторого максимума приводит к соответствующему изменению скольжения, а далее – к изменению конфигурации векторной диаграммы. Векторная диаграмма строится только для одного значения скольжения. Это ограничивает её использование в практических целях. В таком случае строят так называемую круговую диаграмму.
2.9. Построение и использование круговой диаграммы
Круговая диаграмма широко используется в практической работе с асинхронными двигателями. это вариант векторной диаграммы, отражающий характеристики двигателя при любых значениях скольжения. Для построения круговой диаграммы используют данные, полученные из опытов холостого хода и короткого замыкания. Опыт холостого хода проводится при номинальном напряжении питания (U1х=U1ном) и отсутствии нагрузки на валу. Скольжение ротора при этом может быт принято S ≈ 0. Измеряют потребляемые фазный ток I1o и активную мощность Ро. Далее вычисляют коэффициент мощности φ1о=Ро/(3U1хI1o). Опыт короткого замыкания выполняется при заторможенном роторе (S=1). К обмотке статора подводят пониженное напряжение с таким расчетом, чтобы фазный ток был равен номинальному (I1к=I1ном). Измеряют фазное напряжение U1к, ток короткого замыкания I1к и потребляемую активную мощность Рк. По этим данным вычисляют ток короткого замыкания при номинальном фазном напряжении (I1к.ном= I1кU1ном / U1х), коэффициент мощности (Cosφ1к = Pк/(3U1хI1o) и активное сопротивление короткого замыкания ( rк=Рк/(3Iк2) ). Измерив активное сопротивление фазы статорной обмотки r1, находят приведенное активное сопротивление вторичного контура r'2=rк-r1. Выбирают масштабы следующих величин: тока mi (A/мм), напряжения mU (B/мм), мощности mp= mi·3U1ном (Вт/мм) и момента mM=9,55 mp /n1. Построение круговой диаграммы (рис. 3.18) производят в следующем порядке.
Строят от точки О вверх вдоль оси ординат вектор напряжения U1ном, длина которого должна быть равна U1ном/ mU, От него вправо под углом φ1о проводят вектор тока I1o длиной I1o/ mi и конец вектора обозначим точкой «А». Точно так же строят вектор тока короткого замыкания I1к.ном, отклонив его вправо на угол φ1к, и его конец обозначим точкой «К». Если теперь с точки А опустить перпендикуляр к горизонтальной оси, то отрезок АВ в масштабе mp представляет собой потери холостого хода Ро. Далее отрезок АВ нужно разделить пополам точкой С. С приемлемым приближением можно считать, что в масштабе мощности отрезки АС и СВ представляют собой потери мощности соответственно: механические ΔPмех и магнитные ΔPм. Соединив точки С и К, получают изображение вектора тока -I'2к, что полностью согласуется с векторной диаграммой рис. 3.18. Через точку С проводят горизонтальную линию СС', которая определяет положение диаметра окружности круговой диаграммы. Построив от середины отрезка СК перпендикуляр до пересечения с линией СС', находят центр О1, из которого радиусом СО1 проводят показанную на рисунке окружность. По этой окружности перемещается конец вектора статорного тока I1 (см. точки C; D; K и T) при изменении скольжения от S=0 до S=1,0 и далее.
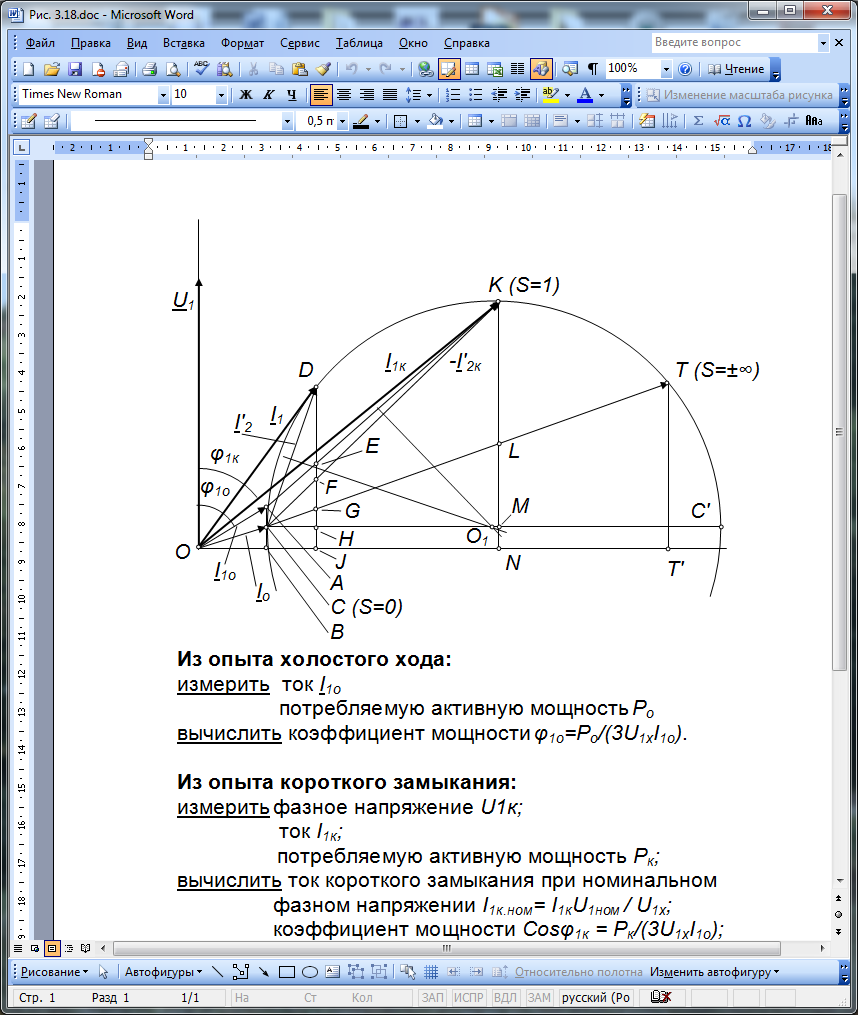
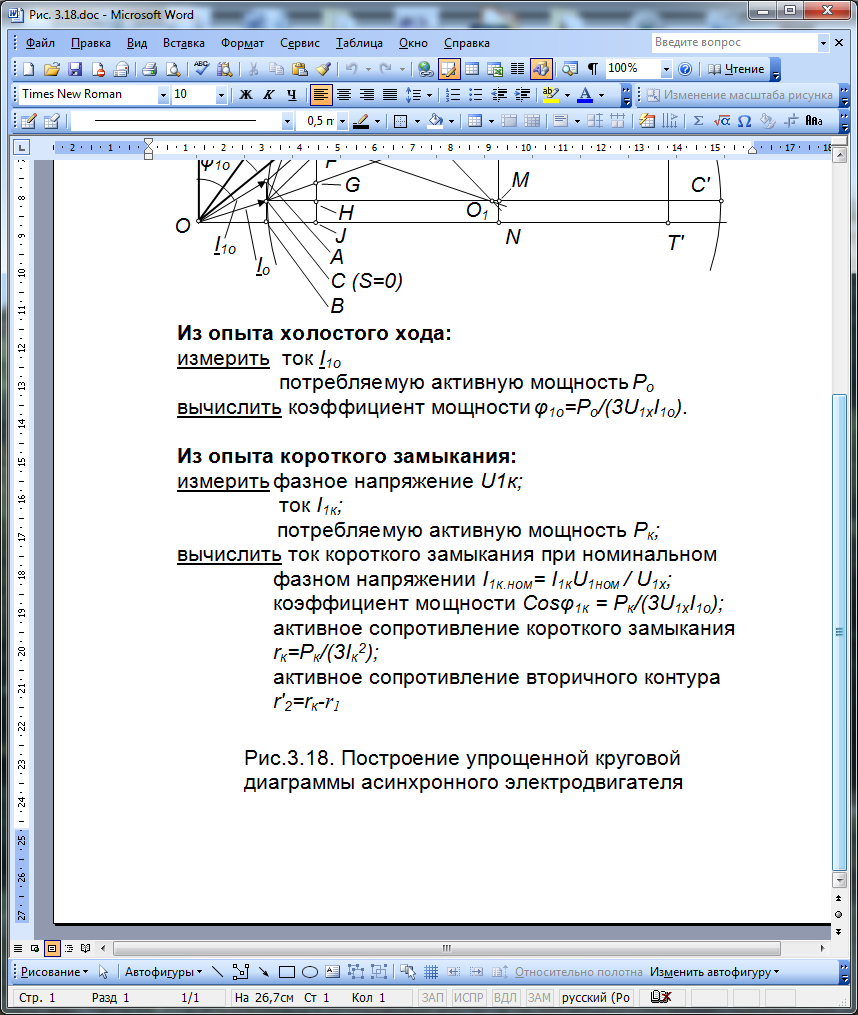
Рис.3.18. Построение упрощенной круговой диаграммы
асинхронного электродвигателя
В пределах дуги СDK машина работает в режиме двигателя, при этом точка С соответствует режиму холостого хода (S=0), а точка К – режиму короткого замыкания (S=1,0). В последнем случае мощность, потребляемая от источника при номинальном напряжении, в масштабе мощности (mp) изображается отрезком КN и вычисляется по формуле
Р1к(Вт)=КN(мм) · mp(Вт/мм) (3.25)
Так как в режиме короткого замыкания ротор неподвижен и энергия рабочему механизму не передается, то вся потребляемая мощность расходуется на нагрев активных частей машины. Отрезок КN содержит информацию о видах потерь мощности: на нагрев магнитопровода статора (ΔPм1=MN·mp), сумму потерь на нагрев обмотки статора (ΔPэ1) и обмотки ротора (ΔPэ2). Эти составляющие потерь можно разделить, если отрезок КМ разделить точкой L в соотношении: KL/LM=r'2/r1. Проведя через точку L прямую СТ, получаем еще одну характерную точку Т круговой диаграммы, для которой справедливо значение скольжения S=±∞. При таком скольжении потребляемая мощность расходуется только на нагрев статора: P1T=ΔPм+ΔPэ1 (на рисунке отрезок ТТ'). Такой режим практически недостижим и учитывается только теоретически для построения круговой диаграммы. В частности, из него можно сделать вывод, что точка L делит отрезок КМ в соотношении: ΔPэ2/ ΔPэ1=KL/LM. Полезно знать, что дуга КТ круговой диаграммы соответствует работе машины в режиме тормоза, а дуга СС1Т (часть дуги не показана) – генераторному режиму. Наибольшее практической значение имеет анализ работы машины в режиме двигателя. Пусть нагрузка машины соответствует точке D круговой диаграммы. Построив отрезок DJ, можем определить все составляющие распределения потребляемой мощности: P1=DJ·mp; потерь в сердечнике статора ΔPм=HJ·mp; потерь в обмотке статора ΔPэ1=GH · mp; потерь в обмотке ротора ΔPэ2=FG · mp; электромагнитной мощности Pэм=DG ·mp; сумму добавочных и механических потерь ΔPмех+ ΔPдоб=ЕF · mp; и полезную мощность, снимаемую с вала Р2=DE · mp. На круговой диаграмме линию ОТ' называют линией электрической мощности Р1, подводимой от сети, линию СТ – линией электромагнитной мощности или электромагнитного момента (в соответствующем масштабе), линию АК – линией полезной мощности. Построенная упрощенная круговая диаграмма применяется широко для определения характеристик асинхронной машины по результатам опытов холостого хода и короткого замыкания как в производстве, так и при входном и послеремонтном контроле.. Наиболее достоверные результаты достигаются для двигательного режима, если ток статора не превышает номинального значения.
2.10. Электромагнитный момент и механическая
характеристика асинхронного двигателя
В результате взаимодействия тока, протекающего в роторной обмотке, с вращающимся магнитным полем создается внутренний, так называемый электромагнитный момент, который удобно использовать для понимания электромеханических процессов в машине. Он пропорционален электромагнитной мощности машины:
M = Pэм/ω1, (3.26)
где ω1=2πn1/60=2πf1/p – угловая синхронная скорость вращения. С учетом скольжения имеем:
M = Pэ2/(ω1S)=m1I'22r'2/(ω1S), (3.27)
т.е., электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке его ротора. Если значение тока по выражению (3.24) подставить в (3.27) и упростить выражение, то получим зависимость момента от скольжения:
 =
f(S) (3.28)
=
f(S) (3.28)
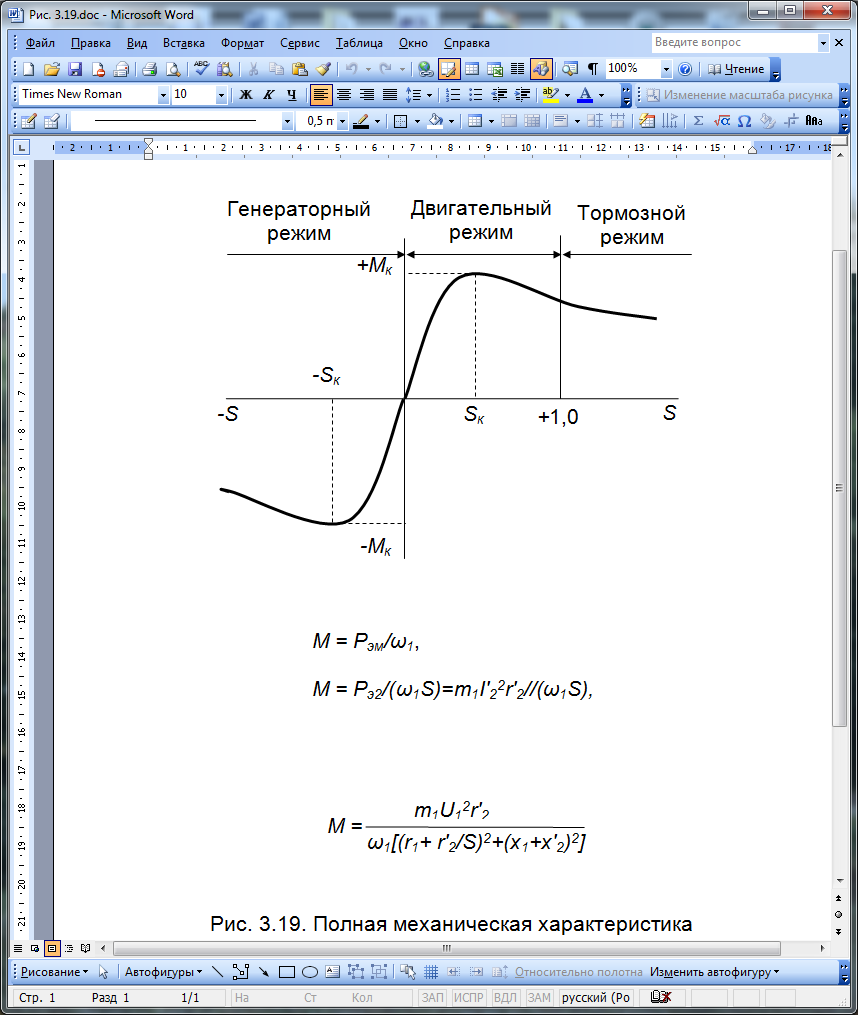
Эту зависимость называют механической характеристикой асинхронной машины. В наиболее общем виде эта характеристика представлена на рис. 3.19.
![]() ;
;
![]() ;
;

Рис.3.19. Полная механическая характеристика
асинхронной машины
Прежде всего, следует обратить внимание на то, что, что на графике имеется два значения скольжения (+Sк и –Sк), при которых момент имеет максимальное значение (+Мк и –Мк соответственно). Точки, соответствующие этим величинам, называют критическими. Также критическими называют и соответствующие этим точкам скольжение (Sк) и момент (Мк). Для грамотной эксплуатации машины эти величины нужно знать и посчитать их можно по соответствующим формулам, справедливым для машин общего назначения, где сопротивление r1 относительно мало и им можно пренебречь:
![]() и
и
 (3.29)
(3.29)
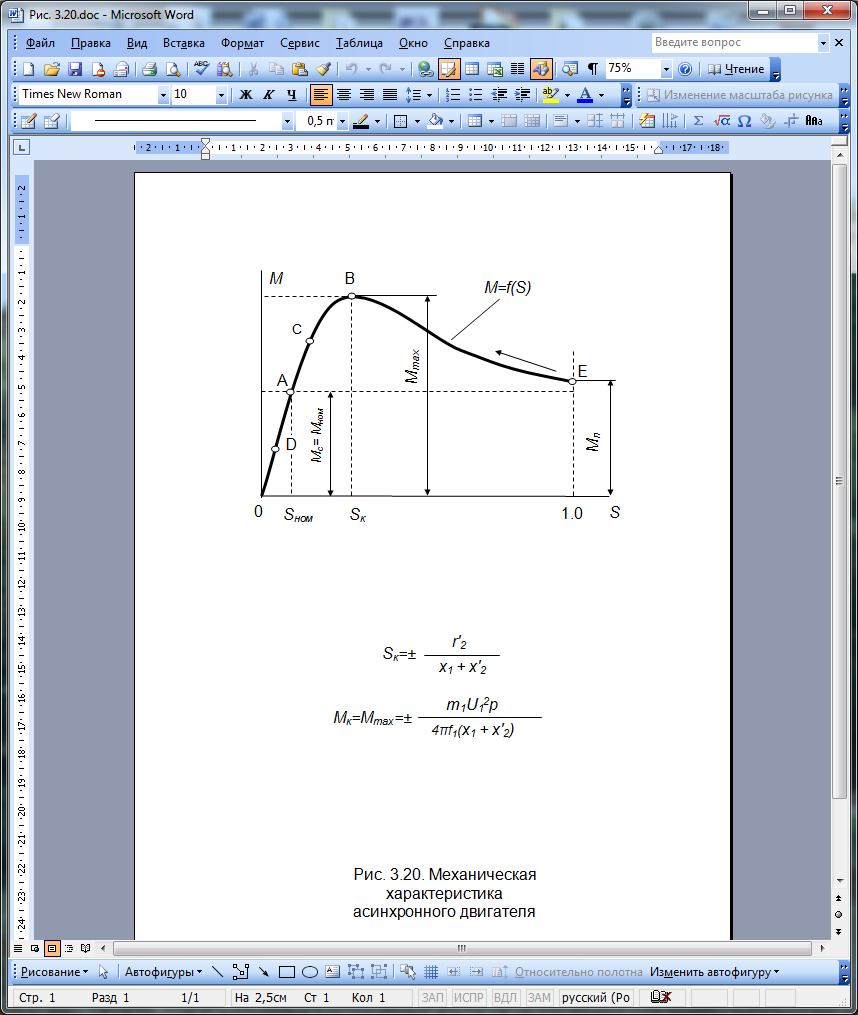
В этих выражениях знак “плюс” соответствует двигательному, а знак «минус» – генераторному режиму работы. Для анализа работы асинхронного двигателя удобнее пользоваться механической характеристикой М=f(S), представленной на рис. 3.20.
![]() ;
;
Рис.3.20. Механическая характеристика
асинхронного двигателя
Нужно обратить внимание, что согласно (3.27) вращающий момент асинхронного двигателя пропорционален квадрату напряжения источника питания. Поэтому даже небольшое снижение напряжения в сети вызывает заметное уменьшение вращающего момента асинхронного двигателя. Так, при снижении напряжения на 10% момент двигателя уменьшается на 19%. При включении двигателя в сеть магнитное поле статора, не обладая инерцией, мгновенно приобретает скорость вращения n1. Ротор же ещё остается неподвижным (n2=0). Это значит, что в момент пуска двигателя скольжение равно единице (S=1,0). Соответствующий этому скольжению вращающий момент называют пусковым (Мп). Ему соответствует точка «Е» на рис. 3.20. Пусковой момент легко вычислить по (3.24), если принять S=1,0. Если он превышает момент сопротивления Мс рабочего механизма, ротор приходит во вращение и его скольжение уменьшается. Точка, отражающая состояние двигателя, перемещается по кривой М=f(S) влево и вверх, как показано стрелкой. Из рисунка следует, что по мере разгона ротора вращающий момент двигателя возрастает до точки В, соответствующей критическому скольжению Sк.. Если этот момент превышает момент нагрузки Мс, ротор продолжает разгоняться и его скольжение уменьшается, становясь меньше Sк.. Из рисунка следует также, что, пройдя точку Sк., вращающий момент двигателя начинает убывать, пока не достигнет точки А. Здесь вращающий момент двигателя и момент сопротивления нагрузки сравняются и ротор приходит в устойчивое вращение с неизменной скоростью, соответствующей скольжению S. В частном случае может оказаться, что момент нагрузки равен номинальному моменту двигателя (Мс= Mном). Тогда установившейся скорости вращения ротора будет соответствовать номинальной скольжение Sном. Если момент нагрузки снизится, режим работы двигателя переместится в точку D и двигатель окажется недогружен. Это не приведет к каким-либо нежелательным последствиям и с возвратом нагрузки в точку А двигатель будет продолжать нормально работать, возвратясь к скольжению Sном. Совсем по-другому может повести себя машина, если момент нагрузки возрастет и рабочая точка по кривой переместится в сторону точки С. Во-первых, это приведет к тому, что потребляемый ток превысит номинальное значение и может возникнуть перегрев статорной обмотки. Во-вторых, если момент нагрузки достигнет величины Мmax или превысит его, то двигатель “опрокинется”, т.е., его скорость упадет до нуля, а потребляемый ток возрастет до величины пускового тока. Поскольку пусковой ток обычно в пять и более раз превосходит номинальный, двигатель начнет сильно греться и возникает опасность его выхода из строя. Поэтому вариант опрокидывания для двигателя недопустим и грозит серьезной аварией. Для её предотвращения в системе управления двигателем предусматривается его защитное отключение от сети. Таким образом, форма механической предопределяет поведение двигателя при пуске, при изменении напряжения питания или нагрузки.
2.11. Регулирование вращающего момента
асинхронного электродвигателя
Форма и параметры механической характеристики асинхронного двигателя зависят от некоторых факторов, которыми можно управлять. Наиболее доступными способами изменения формы и параметров механической характеристики является изменение напряжения сети или активного сопротивления роторной обмотки. Это прямо следует из уравнения (3.27). На рис. 3.21 показаны изменения конфигурации механической характеристики первым (а) и вторым (б) способами. На графике рис. 3.19а) представлены механические характеристики двигателя при трех значениях питающего напряжения: номинальном (U1=Uном), пониженном (U1<Uном) и равном половине номинального(U1=0,5Uном). Если предположить, что двигатель нагружен моментом Мс= Мном, то на графике хорошо видно: при номинальном напряжении развиваемый двигателем вращающий момент при всех значениях скольжения больше момента нагрузки, поэтому двигатель надежно запускается, разгоняется и устойчиво работает при номинальном скольжении Sном.

Рис.3.21. Механические характеристики асинхронного двигателя при изменении: a) напряжения сети;
б) сопротивления обмотки ротора.
При этом после запуска работающий двигатель допускает некоторую перегрузку в пределах, пока максимальный момент Мк1 будет превышать момент нагрузки Мс. Такая перегрузка может быть допустима, если она не вызывает чрезмерного перегрева статорной обмотки. Перегрузочная способность двигателя определяется коэффициентом Км=Мк/Мном. В системе управления двигателем при длительной перегрузке предусматривается тепловая защита, отключающая машину. Перегрузка двигателя при неподвижном роторе приведет к невозможности его запуска, если момент нагрузки станет равен или больше пускового момента Мп1 двигателя. В этом случае также предусматривается его аварийное отключение. При повышенном моменте нагрузки запуск двигателя целесообразно производить на холостом ходу и только после разгона ротора давать нагрузку на его вал. Кратность пускового момента Кп= Мп/Мном – важный каталожный параметр машины. На этом же графике видно, что при небольшом снижении напряжения питания двигатель может продолжать работать (Мс<Мк2), но его скольжение (S) увеличится, что согласно (3.24) может привести к увеличению потребляемого тока и перегреву статорной обмотки. При значительном понижении напряжения питания возникает опасность опрокидывания ротора. Это следует из кривой (U1=0,5Uном), где оказывается, что момент нагрузки превышает максимальный вращающий момент Мк3 двигателя. Ротор в этом случае останавливается и двигатель переходит в режим пуска (S=1). Потребляемый из сети ток резко возрастает. Это – аварийный режим двигателя, который может привести к перегреву статорной обмотки и выходу машины из строя. Поэтому в системе управления асинхронным двигателем предусматривается его аварийное отключение при падении напряжения питания ниже допустимого значения. На графике рис. 3.21б) представлены механические характеристики двигателя при изменении активного сопротивления r2 ротора. Здесь изображены три механические характеристики для разных значений сопротивления роторной обмотки: r2(1) <r2(2) <r2(3). Важное свойство асинхронного двигателя следует из этого рисунка и состоит в том, что развиваемый им максимальный момент не зависит от величины сопротивления роторной обмотки. Это следует также из второго уравнения (3.28). Критическое скольжение оказывается пропорционально величине сопротивления r2, как это следует из первого уравнения (3.28). Поэтому с ростом сопротивления r2 точка максимального момента механической характеристики смещается в сторону больших значений скольжения. Механическая характеристика при этом несколько меняет форму, как показано на рис. 3.21б). Следует обратить внимание, что при увеличении r2 наблюдается рост пускового момента, то есть Мп3 >Мп2 >Мп1. Таким образом, изменением активного сопротивления ротора можно в сравнительно широких пределах регулировать пусковой момент двигателя. Это его свойство широко используется на практике. Так, при пуске асинхронного двигателя с фазным ротором в цепь его роторной обмотки включают специальный пусковой реостат. Его сопротивление плавно снижают по мере разгона ротора (так называемый, тяжелый пуск), что позволяет запустить двигатель с повышенной нагрузкой на валу. В электродвигателях с короткозамкнутым ротором отсутствует возможность включения пускового реостата. Здесь задача тяжелого пуска решается по другому. Так, беличью клетку ротора можно выполнить из материала с повышенным удельным сопротивлением (латунь, железо и т.п.). Недостатком этого способа является увеличение скольжения при номинальной нагрузке. Это следует из сравнения значений скольжений S1 и S2, имеющих место при номинальной нагрузке и сопротивлениях ротора r2(1) и r2(2) (см. рис. 3.21б). Такой вариант закладывается в конструкцию машины, изменять форму характеристики в процессе эксплуатации в этом случае без доработки ротора невозможно. Второй вариант предусматривает изменение сопротивления r2 по мере разгона ротора. Задача решается специальной формой паза сердечника ротора. Чаще всего для этой цели используют глубокие, бутылочные или двойные пазы. Во всех случаях увеличение активного сопротивления ротора достигается за счет так называемого эффекта вытеснения тока в пазу. Его суть объясняет рис.3.22а).
Здесь изображены стержень 1 прямоугольной формы, вытянутой вдоль радиуса, и стенки 2 соседних зубцов сердечника ротора. Если вдоль стержня протекает переменный ток, то выделим в его сечении три нити этого тока i1, i2 и i3, разнесенные по высоте паза. В соответствии с принятым направлением мгновенного тока в нитях показаны пути замыкания магнитного поля рассеяния Фs1,Фs2 и Фs3, создаваемого током каждой нити. На рисунке видно что каждая нить тока оказывается сцепленной с разным количеством силовых линий поля рассеяния, следовательно, обозначенные нити имеют разное индуктивное сопротивление в соотношении x2(1<x2(2)<x2(3). На концах всех нитей в любой момент действует одинаковое напряжение и согласно закону Ома токи в нитях будут распределены обратно пропорционально величине полного сопротивления. Поэтому протекающие в нитях переменные токи находятся в соотношении: i1> i2 >i3. Это значит, что в верхней части сечения стержня плотность тока оказывается выше, чем в нижней. на графике справа изображено распределение плотности тока (J=Iст/qст) по высоте стержня. Наблюдается вытеснение тока в верхнюю часть сечения, что эквивалентно уменьшению величины сечения. Это приводит к возрастанию активного сопротивления беличьей клетки и далее – к увеличению величины критического скольжения, а в конечном итоге - к росту пускового момента. По мере разгона ротора частота тока в беличьей клетке подает, что приводит к выравниванию плотности тока в стержне и к падению его активного сопротивления.
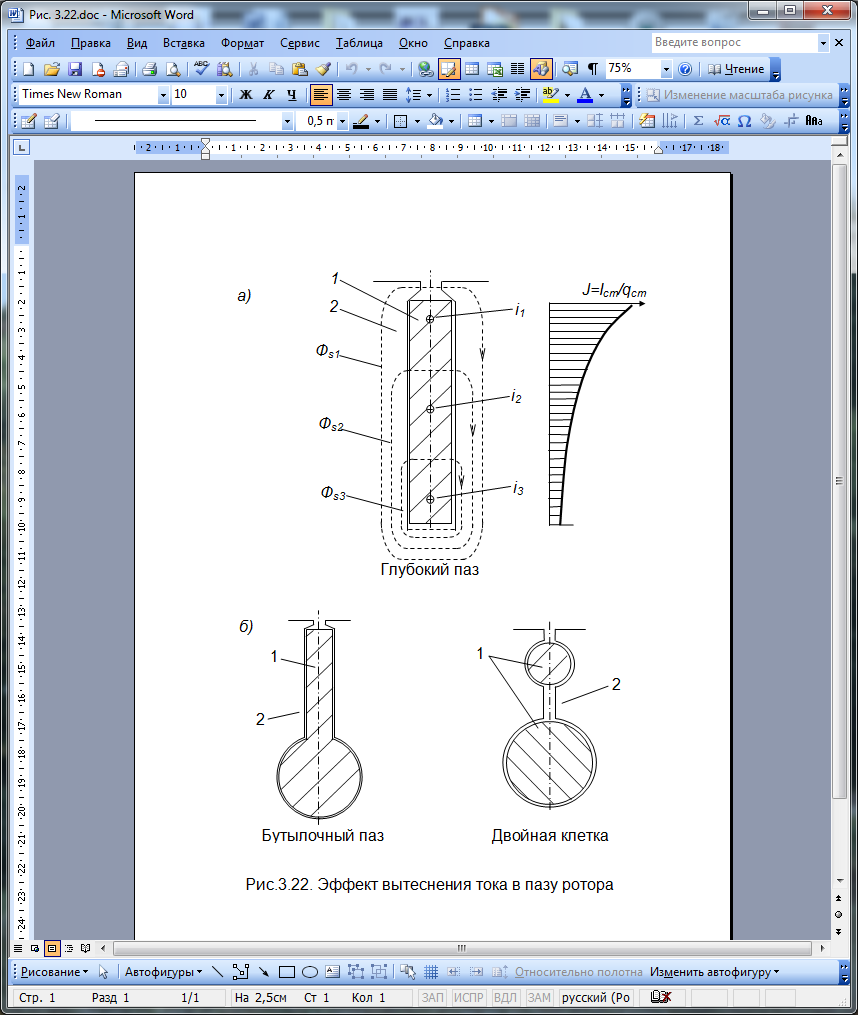
Рис.3.22. Эффект вытеснения тока в пазу ротора
Поэтому механическая характеристика глубокопазного двигателя имеет своеобразный вид и её пример представлен ни рис. 3.21а) жирной пунктирной линией ГП . Форма этой механической характеристики в конечном итоге сильно зависит от формы сечения стержня. На практике кроме глубокого прямоугольного паза применяют также бутылочные и двухклеточные пазы, как показано на рис. 3.22б). Асинхронные двигатели с рассмотренными вариантами паза ротора применяются в случаях тяжелых пусков.
2.12. Регулирование частоты вращения ротора
асинхронного двигателя