

Учебное пособие 800427
.pdfные принципы организации параллельных вычислительных систем реализуются в ар-
хитектуре вариантов, приведенных на рис. 2.5, б и г. На основе таких архитектур мультипроцессорных систем в соответствии с требуемыми задачами автоматизации производства возможно построение различных вариантов структур управления робо-
тотехническими комплексами оборудования. |
|
|
В простейшем случае при |
роботизации, например, |
механического участ- |
ка прессового оборудования |
для холодной штамповки |
в состав системы про- |
граммного управления группой цикловых ПР входят: пульт оператора, модули управ-
ления (микроЭВМ), памяти, дискретных команд входов-выходов и связи (микропро-
цессор) при необходимости выхода на следующий уровень управления. Роботизация механического участка металлорежущих станков с ЧПУ может потребовать дополнительно введения модулей интерполятора, управления приводами станка и робота, измерительного модуля и т. д.
Автоматизация операций на таком участке, связанных с загрузкой станка не-
ориентированными в пространстве заготовками, потребует, например, при использо-
вании средств технического зрения введения модуля предварительной обработки ви-
зуальной информации, модуля адаптивного управления и т. д.
Аналогично можно проследить видоизменением состава модулей программно-
го и адаптивного управления на уровне ячейки, участка при автоматизации основных технологических операций, таких как дуговая или контактно-точечная сварка, сборка изделий различной сложности, нанесение лакокрасочных покрытий и т. д.
Автоматизация транспортных и складских операций на данном уровне управ-
ления может отсутствовать, но она является необходимой и обязательной при перехо-
де на следующий иерархический уровень — групповое управление участком (лини-
ей).
Верхним уровнем управления при автоматизации линий, цехов, производств является автоматическая система управления технологическими процессами (АСУ ТП).
Таким образом, представленный набор средств управления позволяет компоно-
вать типовые управляющие комплексы и широкий спектр их модификаций для раз-
личных задач управления роботизированными производственными ячейками, участ-
ками, линиями и т. д.
3. Основные функциональные модули систем управления
В управляющих системах ПР независимо от их назначения, принципов струк-
турно-алгоритмической организации, информационно-вычислительных возможно-
стей и т. д. можно укрупненно выделить следующие основные функциональные мо-
дули: управляюще-вычислительный, программозадающий, сопряжения с манипу-
лятором, технологическим оборудованием и пульт управления.
Использование принципов блочно-модульного построения систем управления предполагает большую функциональную завершенность таких модулей с учетом расширенной их номенклатуры и степени сопряжения между собой.
Внутренний (межблочный) интерфейс системы обусловливается выбранной органи-
зацией управляюще-вычислительной части (процессора); он особенно ярко выражен в микропроцессорных системах управления, достаточно многообразен и может явиться предметом отдельного рассмотрения.
В данной главе акцентировано внимание на принципах построения блоков (мо-
дулей), функциональное назначение и сложность которых определяется применением их в различных цикловых и позиционно-контурных системах управления ПР.
3.1. Управляюще-вычислительные модули
В описанных ранее системах циклового программного управления (ЦПУ), по-
строенных по принципу жесткой реализации алгоритма управления, в качестве управляюще-вычислительного модуля использован микропрограммный автомат. Ос-
новной функцией такого модуля является формирование, в соответствии с требуемым алгоритмом, микроопераций (управляющих импульсов) для выдачи их в операцион-
ные узлы и другие функциональные блоки.
Задание микропрограммы в данном случае осуществляется обычно с помощью граф-
схемы или логической схемы алгоритма.
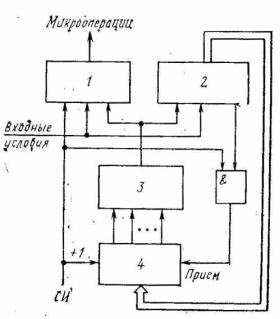
Примером структурной организации управляющего автомата на жесткой логи-
ке может служить схема, показанная на рис. 3.1. Собственно управляющий автомат со стоит из двух основных частей - памяти и комбинационной части.

Функционально комбинационная часть содержит: дешифратор состояний авто-
мата; схему формирования функций выхода; схему формирования функций возбуж-
дения.
Рис.3.1. Структурная организация управляющего автомата на жесткой логике:
1 – схема формирования выходных сигналов; 2 – схема формирования функций воз-
буждения; 3 – дешифратор состояний; 4 – буферный регистр; 5 – память возбужде-
ния; 6 – схема пуска-останова.
В большинстве случаев при построении управляющих автоматов пользуются
моделью автомата Миля, в которой выходные сигналы, вырабатываемые в процессе перехода из состояния в состояние, и сигналы возбуждения элементов памяти являются логическими функциями состояния автомата и набора входных логических
условий, поступающих с внешних по отношению к автомату операционных узлов.
Память автомата строится, как правило, |
по двухъярусной схеме и включает |
память возбуждений и буферный регистр. |
|
Синхронизация автоматов с двойной |
памятью производится с помощью |
двух последовательностей синхронизирующих импульсов СИ и СИ . Первая последо-
вательность импульсов обеспечивает работу комбинационной части, а вторая необходима для переписи состояния триггеров памяти возбуждений в буфер-
ный |
регистр. |
Для нормальной работы управляющего автомата в |
качестве до- |
|
полнительного |
узла в его состав обычно включают схему пуска-останова, которая |
|||
устанавливает |
в |
исходное состояние элементы памяти возбуждений при включе- |
||
нии питания или по сигналу пуска и открывает вентиль для выдачи |
синхронизи- |
|||
рующих сигналов на комбинационную часть. |
|
|||
|
Рассмотрим принцип работы данного автомата. |
|
||
|
При поступлении импульса запуска на схему пуска-останова формируется сиг- |
|||
нал сброса элементов памяти возбуждений в исходное состояние, которое по импуль-
су СИ переписывается в буферный регистр. Исходное состояние автомата далее де-
шифрируется и поступает на вход логических схем формирования выходных сигна-
лов и функций возбуждения, на которые также поданы потенциальные сигналы логи-
ческих условий, анализируемые автоматом по алгоритму. Схема пуска-останова от-
крывает вентиль, пропускающий на комбинационную часть тактирующую серию им-
пульсов (СИ). По первому импульсу этой серии комбинационной частью в соответст-
вии с граф-схемой алгоритма формируются: (вырабатываемые при переходе из ис-
ходного состояния) выходные сигналы, поступающие на операционные узлы, и сиг-
налы возбуждения элементов памяти, определяющие очередное состояние автомата.
По импульсу СИ сформированное состояние переписывается в буферный регистр,
дешифрируется и поступает на логические схемы комбинационной части, подготав-
ливая их к работе в очередном такте. В дальнейшем по мере подачи синхронизирую-
щих сигналов автомат, отрабатывая алгоритм, повторяет описанный цикл работы.
Рассмотренная структурная организация управляющего автомата является эф-
фективной при построении автоматов с большим числом состояний и сильно ветвя-
щимися алгоритмами.
При построении простых автоматов с относительно небольшим числом состоя-
ний (ориентировочно до 15-30) и в основном последовательным характером алгорит-
ма оказывается целесообразной структурная схема автомата, изображенная на рис.
3.2.
Для данной схемы характерно то, что в качестве памяти автомата используется асинхронный счетчик, обладающий свойствами двойной памяти. В этом случае отпа-
дает необходимость формирования функции возбуждения в ветвях алгоритма с по-
следовательными операторами. Ветвление алгоритма производится за счет записи
счетчиком кода требуемого состояния, который формируется с помощью шифратора,
функционально выделенного в комбинационной части. Код очередного состояния вырабатывается в зависимости от значения набора входных логических условий.
Сигнал загрузки счетчика при ветвлении формируется специальным вентилем, управ-
ляемым от шифратора очередного состояния.
Рис. 3.2. Структурная схема управляющего автомата со счетчиком состояний:
1 – схема формирования выходных сигналов; 2 – шифратор очередного состояния; 3 –
дешифратор состояния; 4 – счетчик состояний.
Организация такого управляющего автомата позволяет применить в качестве дешифратора и счетчика ИМС средней степени интеграции, что обеспечивает ком-
пактность аппаратной реализации. Другим направлением в реализации микропро-
граммных автоматов управления является использование их структурной организа-
ции на основе программируемой логики [29]. В основе таких автоматов лежит прин-
цип программного управления, в котором использована операционно-адресная струк-
тура управляющих слов. Управляющее слово определяет порядок функционирования автомата в течение одного такта (микрокоманда). Каждая микрокоманда содержит информацию о выдаваемых в такте микрооперациях и об адресе следующей микро-
команды.
Структура управляющего автомата с программируемой логикой изображена на рис. 3.3. Микропрограмма работы автомата хранится в ПЗУ, в каждой ячейке которо-
го записана одна микрокоманда. Считываемые из ПЗУ микрокоманды заносятся в

специальный регистр для текущего хранения на время одного такта. Каждая микро-
команда состоит из четырех информационных полей:
-номера выдаваемой в такте микрооперации;
-номера опрашиваемого логического условия;
-адресов для принудительной адресации очередной микрокоманды (А0 или А1).
Рис.3.3. Структурная схема управляющего автомата с программируемой логикой: 1 –
дешифратор микроопераций; 2 – коммутатор логических условий; 3 – коммутатор ад-
реса; 4 – распределитель импульсов.
Микрооперации формируются с помощью тактируемого дешифратора, подклю-
ченного к соответствующему регистру микрокоманд. Опрос логических условий про-
изводится коммутатором, адресуемым полем номера логического условия в регистре микрокоманд. Передача из регистра микрокоманд адресов А0 и А1 в регистр адреса
(РА) ПЗУ осуществляется с помощью коммутатора, управляемого с выхода коммута-
тора логических условий. В случае, если состояние опрашиваемого логического усло-
вия равно нулю, то в адресный тракт передается адрес А0, в противном случае — адрес А1.
Местное управление работой автомата осуществляется с помощью распредели-
теля тактирующих импульсов, работающего по жесткому циклу:
-чтение в регистр микрокоманд;
-тактирование дешифратора микроопераций;
-занесение в адрес очередной микрокоманды в РА ПЗУ.
Считанная из ПЗУ микрокоманда обрабатывается следующим образом. Код но-
мера микрооперации поступает на дешифратор, тактируемый от распределителя им-
пульсов. В момент прихода импульса «Выдача» формируется микроопераций, посту-
пающая в операционные узлы. При данной структуре автомата в каждом такте может выполняться не более одной микрооперации. После выполнения микрооперации осу-
ществляется переход к очередной микрокоманде по адресу А0 или А1; определяемому в результате анализа состояния условия с номером, указанным в микрокоманде. Ад-
рес перехода по импульсу «Запись в РА» вносится в регистр адреса ПЗУ. Управляю-
щие автоматы с программируемой логикой включают также схему пуска-останова.
Путем введения ряда дополнительных узлов можно обеспечить одновременную выдачу нескольких микроопераций и высокий коэффициент использования емкости ПЗУ. Среди достоинств данной структурной организации отметим возможность схемной реализации автомата на базе серийно выпускаемых СИС и БИС ПЗУ, что по-
зволяет существенно сократить аппаратурные затраты. Однако по сравнению с управ-
ляющими автоматами на жесткой логике автоматы с программируемой логикой обла-
дают более низким быстродействием.
Рассмотренные принципы структурной организации микропрограммных авто-
матов использованы при построении цикловых устройств УЦМ-30, УЦМ-663 и легли в основу управляюще-вычислительных модулей при создании позиционных уст-
ройств типа УПМ-772. Прогресс в развитии микропроцессорной техники выявил эф-
фективность использования в локальных и особенно групповых средствах программ-
ного управления промышленными роботами циклового и позиционно-контурного ти-
пов в качестве управляюще-вычислительных модулей микропроцессорных наборов и стандартных микроЭВМ различной конфигурации.
Структурная схема микроЭВМ содержит в общем случае пять основных частей:
микропроцессор, схемы формирования сигналов внутреннего интерфейса и тактиро-
вания, оперативно-запоминающее устройство (ОЗУ), ПЗУ и устройства ввода-вывода.
Ядром микроЭВМ является микропроцессор, состоящий из одной или несколь-
ких БИС, выполняющий функции по логической обработке информации. Организа-
ция микропроцессора ориентирована на достижение универсальности его использо-
вания, высокой производительности и технологичности.
Универсальность микропроцессоров (МП) определяется возможностью их раз-
нообразного применения и обеспечивается программным управлением МП и специ-
альными аппаратно-логическими средствами: использованием внутренней сверхопе-
ративной памяти, развитой системой прерывания, магистральной организацией внут-
ренних и внешних шин.
Принципиальной особенностью всех микропроцессорных систем является на-
личие унифицированного для модулей магистрального интерфейса, по которому они обмениваются информацией с процессором. Большинство МП самостоятельно не может формировать все системы внутрисистемного интерфейса из-за ограничений на число выводов корпуса микропроцессора и их ограниченной нагрузочной способно-
сти. Для зтой цели в составе микроЭВМ предусматривают специальные схемы, как правило, входящие в микропроцессорный набор. В ряде случаев специальные схемы приходится применять для формирования тактовых импульсов, синхронизирующих работу МП.
К внутреннему интерфейсу микроЭВМ подключены все основные функцио-
нальные узлы как самой микроЭВМ, так и все внешние по отношению к ней модули.
Программа, по которой работает микроЭВМ, хранится в постоянном запоминающем устройстве и не разрушается при отключении питания. Для хранения данных в соста-
ве микроЭВМ предусмотрено ОЗУ. Кроме ОЗУ и ПЗУ остальные функциональные узлы микроЭВМ по отношению к МП рассматриваются как устройства ввода-вывода,
в том числе блоки приоритетных прерываний, каналы последовательной передачи данных, программируемые таймеры и т. п.
Выбор типа микропроцессора для построения микроЭВМ производят на ос-
нове анализа технических требований, предъявляемых к функциям микроЭВМ, вы-
полняемым в управляющем устройстве. В цикловых устройствах на микроЭВМ в ос-
новном возлагаются функции логической обработки информации. МикроЭВМ выполняет также ряд вспомогательных функций по настройке программируемых БИС ввода-вывода, организации работы каналов последовательной передачи данных и т. п. Требования к быстродействию МП определяются организацией мультипро-
граммного режима работы микроЭВМ при одновременном управлении несколь-
кими координатами одного манипулятора и одновременном управлении несколь-
кими манипуляторами. При выборе типа МП следует учитывать возможности
организации развитой периферии, т. е. выбор БИС должен обеспечивать тре-
буемое и компактное построение всей микропроцессорной системы управления. По-
лучивший применение микропроцессорный набор типа КР580 имеет в своем составе
БИС контроллера прерываний, программируемого таймера, параллельного про-
граммируемого адаптера, контроллера прямого доступа в память и т. д. Собственно
микропроцессор рассматриваемого набора обладает развитой |
системой команд, |
|
позволяющей обрабатывать 8- и 16-разрядные |
слова, имеет |
удовлетворитель- |
ное быстродействие (время выполнения простых операций — 2 икс) и т. д. В пози- |
||
ционно-контурных системах управления на |
микроЭВМ возлагаются задачи об- |
|
работки информации: в контуре управления приводами, интерполяции, различных видов коррекций траектории и т. д. Для решения таких задач более эффективным оказывается микропроцессорный набор с процессором КР1810ВМ86. Успешное вы-
полнение задачи позиционно-контурного управления достигается также с применени-
ем стандартных микроЭВМ, например, типа «Электроника-60» или других различной производительности.
Рассмотрим структуру микроЭВМ на примере управляюще-вычислительного модуля, устройства циклового управления, построенного на базе МПН КР580 (типа УЦМ-100).
На рис. 3.4 приведены состав микроЭВМ и основные связи между функцио-
нальными узлами. Внутренний интерфейс микроЭВМ содержит:
-шину данных, по которой производится двунаправленный обмен данными между отдельными составными частями микроЭВМ;
-адресную шину, которая служит для адресации памяти и периферийного оборудования;
-управляющую шину, которая обеспечивает согласованную работу составных
частей микроЭВМ и управляет процессами передачи данных по внутренне-
му интерфейсу.
Обработка информации в микроЭВМ осуществляется микропроцессором типа КР580ИК80А.
Тактирование МП и управление внутренним интерфейсом производятся с по-
мощью ИМС КР580ГФ24 и КР580ВГ28. Генератор тактовых сигналов синхронизиру-
ет работу микропроцессора при помощи двух временных сигналов Ф1 и Ф2, выраба-
тывает ряд вспомогательных сигналов системного интерфейса, в том числе сигналы системного сброса и системной готовности. В функции генератора тактов входит также формирование сигнала приема слова-состояния в системный контроллер. По-
следний обеспечивает управление буфером шины данных процессора и формирова-
ние сигналов шины управления.
Для повышения нагрузочной способности адресной шины на выходе адресного тракта МП установлен буфер из шинных формирователей типа К589АМ6, настроен-
ных на передачу адресной информации от МП в шину адреса.
Микропроцессор, генератор тактов, системный контроллер и буфер адреса со-
ставляют ядро микроЭВМ. Проблемная ориентация микроЭВМ достигается за счет применения БИС МПН соответствующей функциональной номенклатуры и комплек-
тования микроЭВМ ОЗУ и ПЗУ необходимой емкости. В состав микроЭВМ при по-
строении управляющих систем входят обычно БИС блока приоритетных прерываний,
программируемого таймера и программируемого связного адаптера.
Блок приоритетных прерываний, реализованный на БИС КР580ВН59, предна-
значен для управления процессом обслуживания многоуровневых прерываний от раз-
личных блоков. Программируемый блок приоритетных прерываний увеличивает про-
пускную способность системы: одна БИС типа КР580ВН59 обеспечивает возмож-
ность обработки восьми сигналов — запросов прерывания. Путем каскадного вклю-
чения таких микросхем число запросов прерывания можно расширить до 64. Каждый сигнал блока соответствует определенному уровню прерывания. Приоритет различ-
ных уровней задается путем программирования и может быть «замаскирован» запи-
сью соответствующего кода в регистр маски, предусмотренный в микросхеме.
Включение блока приоритетных прерываний в состав микроЭВМ современных устройств управления ПР необходимо для решения задач группового управления ма-
нипуляторами в реальном масштабе времени и организации связи с ЭВМ верхнего ранга и терминалами. С этой же целью в состав микроЭВМ включают также про-
граммируемый таймер, обеспечивающий формирование временных задержек различ-
ного назначения.
Таймер содержит три 16-разрядных счетчика и схему управления, которая «на-
страивает» счетчики на различные режимы работы (деление частоты на заданное чис-
ло, отсчет определенной выдержки времени и т. п.). Режимы работы задаются путем