

Контрольные вопросы к защите
См. все вопросы к работам № 1– 5.
Пусть линеаризованная система устойчива. Может ли система стать неустойчивой при учете насыщения привода? На каких режимах это особенно опасно?
Является ли примененный способ коррекции линейным или нелинейным? Почему?
Как работает регулятор, если сигналы не выходят за допустимые пределы? Почему (докажите по схеме)?
Что такое anti-windup?
Объясните действие блока Gain.
Как скопировать блок из одной модели в другую?
Как изменить число входов мультиплексора?
Зачем нужен нормирующий усилитель?
Как нужно подключать блок NCD Outport?
Как устанавливать ограничения на переходную функцию?
Как установить пределы для поиска решения в блоке NCD Outport?
Системы автоматического регулирования и управления
Отчет по лабораторной работе № 6
Оптимизация нелинейных систем в среде Matlab
Выполнили:
студенты гр. НТ-001 Иванов И.И., Петров П.П.
Проверил:
к.ф.-м.н., доцент Королев К.Г.
Вариант
20
Описание системы
Исследуется нелинейная система управления судном по курсу, структурная схема которой показана на рисунке.

Движение судна описывается линейной математической моделью в виде передаточной функции
 ,
где
,
где
 рад/сек,
рад/сек,
 сек,
сек,
Линейная модель привода представляет собой интегрирующее звено с передаточной функцией
,
 сек,
сек,
охваченное единичной отрицательной обратной связью. На угол перекладки руля и скорость перекладки накладываются нелинейные ограничения
, .
Измерительное устройство (гирокомпас) моделируется как апериодическое звено с передаточной функцией
,
 сек,
сек,
В качестве управляющего устройства используется ПИД-регулятор с передаточной функцией
,
где
 ,
сек,
сек,
сек,
,
сек,
сек,
сек,
Для компенсации эффекта насыщения, вызванного ограниченным углом перекладки руля, используется схема с нелинейной обратной связью, охватывающей интегратор в составе регулятора. В ходе работы требуется выбрать оптимальное значение коэффициента усиления в обратной связи с помощью пакета NCD Blockset.
Блок компенсации насыщения
подсистема «Регулятор»
пределы для блока Saturation


номинальное значения

модель для сравнения трех типов систем
переходные процессы при
при введении компенсации насыщения интегрирующего звена … (что наблюдается?)
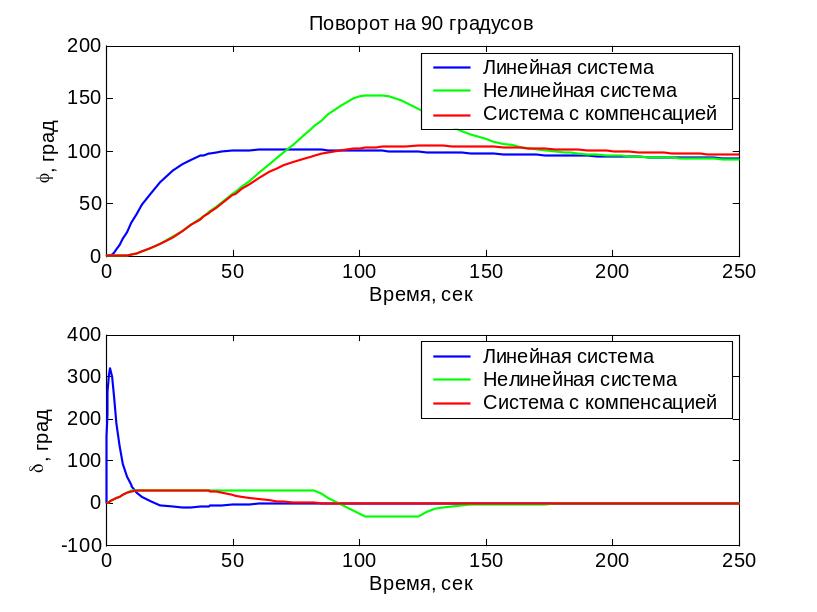
Оптимальный выбор
модель для оптимизации
переходные процессы при
 (поворот на 90 градусов)
(поворот на 90 градусов)

перерегулирование
 ,
время переходного процесса
,
время переходного процесса
 сек.
сек.переходные процессы при повороте на 30 градусов

перерегулирование
 ,
время переходного процесса
,
время переходного процесса
 сек.
сек.применение оптимальной компенсации позволило … (сравнить с линейной и нелинейной системой)
Библиографический список
1. Поляков К.Ю. Теория автоматического управления: www.kpolyakov.narod.ru: мет. указания: / К.Ю. Поляков, Санкт-Петербург, СПбМТУ, 2008.
Содержание
Теоретическая часть 1
Практическая часть 10
Отчет 25
Библиографический список 30
Методические указания
к выполнению и оформлению лабораторной работы № 6 по дисциплине «Системы автоматического регулирования и управления» для студентов специальности 140401 «Техника и физика низких температур» очной формы обучения
Составитель
Королев Константин Геннадьевич
В авторской редакции
Компьютерный набор К.Г. Королев
Подписано к изданию 23.12.2011.
Уч.-изд. л. 1,6.
ФГБОУ ВПО «Воронежский государственный технический университет»