

В.И. Кравченко, Н. Э. Самойленко
ОСНОВЫ АВТОМАТИКИ И СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Часть 1
Учебное пособие
Воронеж 2002
МИНИСТЕРСТВО ОБРАЗОВАНИЯ РОССИЙСКОЙ
ФЕДЕРАЦИИ
Воронежский государственный технический университет
В. И. Кравченко
Н. Э. Самойленко
ОСНОВЫ АВТОМАТИКИ И СИСТЕМЫ
АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Часть 1
Учебное пособие
Воронеж 2002
УДК 621
Кравченко В.И., Самойленко Н.Э. Основы автоматики и системы автоматического управления: Учеб. пособие. Воронеж: Изд-во ВГТУ, 2002. 93 с.
В пособии рассматриваются основные задачи проектирования эффективных систем автоматического управления (САУ) и методы их решения. Первая глава содержит основные понятия САУ, классификацию САУ, структуру и основные элементы САУ, а также функциональную схему САУ. Во второй главе рассматриваются линейные САУ и их основные динамические звенья. В третьей главе рассматриваются критерии устойчивости линейных систем. Четвёртая глава посвящена цифровым САУ. Пятая глава посвящена принципам построения и инструментальным средствам АСУ. Главы 1, 2, 3 написаны Самойленко Н.Э., главы 4, 5 - Кравченко В.И.
Учебное пособие предназначено для студентов специальности 200800 “Проектирование и технология РЭС” по дисциплине “Основы автоматики и САУ” , издано на магнитном носителе, имя файла pos_САУ.DOC, объем 995 КБ.
Ил. 69. Библиогр.: 4 назв.
Научный редактор д-р техн. наук О. Ю.Макаров
Рецензенты: НТС ОАО Электросигнал,
главный инженер А. Д. Верёвкин
канд. физ. - мат. наук И. Ю. Шурупова
Издается в электронном виде по решению Редакционно-Издательского Совета Воронежского государственного технического университета
Кравченко В.И., Самойленко Н. Э., 2002
Оформление. Воронежский государственный технический университет, 2002
ВВЕДЕНИЕ
Современный этап научно-технического прогресса характеризуется увеличением количества технических изделий с одновременным их усложнением, а также необходимостью сокращения сроков и повышения качества проектирования.
Основным средством решения данной проблемы является комплексная автоматизация проектирования и производства, при которой в рамках системного подхода определяющим фактором повышения эффективности процесса функционирования производственной системы является наличие мобильной и оптимальной по структуре системы управления реального времени, адекватно отображающей протекающие в системе процессы. Создание и эксплуатация современных систем автоматизации в современных условиях перестали быть функциями лишь узкого круга специалистов по автоматизированному и автоматическому управлению. Такие системы требуют участия практически всех групп инженерно-технического персонала . Следовательно, даже мнженер, непосредственно не связанный по роду своей деятельности с автоматизацией управления, должен обладать достаточно широкими знаниями в этой области.
2
ОСНОВНЫЕ ПОНЯТИЯ
1.1. Структура САУ
Автоматика – отрасль науки и техники, охватывающая теорию и принципы построения систем управления техническими процессами.
Технический процесс – это устройство или реализованный технологический процесс. Автоматика изучает системы управления, действующие без непосредственного участия человека.
Принята следующая классификация параметров технического процесса.
1. Входное воздействие
2. Внешнее воздействие
3. Внутренние параметры
4. Выходные парамтеры (координаты выходного сигнала или управляемые величины).
В САУ изменение управляемой величины по определенному закону без вмешательства человека выполняет управляющее устройство (УУ). САУсостоит из УУ и объекта управления (ОУ).
САУ – это такая система, которая обеспечивает комплекс операций по управлению любым техническим, в том числе производственным процессом без участия человека с помощью автоматического управляющего устройства.
Каждый процесс управления в любой момент времени характеризуется одним или несколькими показателями, которые отображают физическое состояние объекта управления (ОУ). Эти показатели в процессе управления должны изменяться по некоторому закону или же оставаться низменными при изменяющихся внешних условиях и режимах работы УУ. Такие показатели называются параметрами управления процесса.
3
Автоматическое регулирование – это составляющая часть задачи автоматического управления. Автоматическое регулирование это поддержание постоянства или изменения по
заданному закону некоторой величины. Автоматическое регулирование осуществляется при помощи измерения состояния ОУ и воздействия на регулирующее устройство.
Таким образом, автоматическое управление это совокупность воздействий, направленных на улучшение функционирования объекта управления. При этом воздействие выбирается из множества возможных на основе необходимой информации.
Обобщенная структура САУ изображена на рис. 1.1.
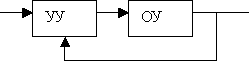
Рис.1.1
Схема функционирования САУ приведена на рис. 1.2..

Рис. 1.2
4
На рис. 2 приведены следующие обозначения
y(t) – выхной сигнал
g(t) – задающее воздействие, поступает на вход УУ и содержит информацию о требуемых значениях выходных параметров y(t)
z(t) – управляющее воздействие поступает от УУ на вход ОУ, для обеспечения в нем
желаемого процесса
f(t) – возмущающее воздействие приложено к объекту управляющее и вызывающее отклонение управляемого параметра y(t) от заданного значения
x(t) – это сигнал , поступающий с выхода ЧЭ и является функцией
x(t)=F(g(t), y(t), f(t)) (1.1)
x(t) – характеризует ошибку САУ.
Для элементов САУ использованы обозначения ЧЭ – чувствительный элемент, У – усилитель, КУ1, КУ2 – последовательные и параллельные корректирующие устройства, ИМ – исполнительный механизм.
Функционирование САУ осуществляется следующим образом.
Задающее воздействие g(t) является входным сигналом САУ и определяет требуемый закон измененения выходного сигнала. g(t) поступает на чувствительный элемент, кроме того, на ЧЭ подаются сигналы обратной связи y(t) и возмущающего воздействия f(t). ЧЭ вырабатывает сигнал ошибки x(t). Характеризующий ошибку САУ сигнал x(t) усиливается усилителем У и поступает на ИМ, который вырабатывает и подает на ОУ управляющее воздействие. Иногда, кроме сигнала x(t), учитывают его производные и интегральные характеристики. Для обеспечения требуемых статических и
5
динамических характеристик системы, используют корректирующие устройства КУ1- последовательное и КУ2- параллельное.
Кроме того, в состав САУ могут входить специальные элементы для согласования отдельных частей системы и вычислительное устройство для реализации алгоритма работы УУ.
В САУ рассматривается два типа ошибок, статическая и динамическая. Статическая ошибка – это установившееся значение разности между заданным и текущим значениями y(t) при постоянных значениях задающего g(t) или возмущающего
воздействия f(t). Динамическая ошибка значение разности между заданным и текущим значением управляющих воздействий при произвольных y(t) и f(t). Величины ошибок зависят от структуры УУ. Система, в которой статическая ошибка не равна нулю, называется статической. Система с нулевой статической ошибкой называется астатической (нестатической).
Параметры САУ могут быть постоянными или переменными. Если параметры САУ постоянные, или изменяются по линейному закону, САУ называется линейной.
1.2. Классификация САУ
Принята следующая классификация существующих САУ
I. По виду используемой УУ информации различают разомкнутые или замкнутые САУ. В разомкнутых системах отсутствует обратная связь между входными и выходным УУ.
При наличии обратной связи ОУ и УУ образуют замкнутый контур, обеспечивающий автоматический контроль за состоянием ОУ.
II. По характеру применения задающеговоздействияy(t)
6
различают следующие системы.
1. Система автоматической стабилизации g(t) постоянно, то есть необходимо поддерживать постоянным значение управляемого сигнала y(t).
2.Система программного управления задающее воздействие изменяется по некоторому заранее известному закону.
3. Следящие системы, у которых y(t) заранее не известен. Принято выделять адаптивные системы, которые могут приспособиться к изменениям внешних условий, а также улучшать свою работу по мере накопления опыта. Адаптивные системы бывают четырёх видов:
а) оптимальные
б) самонастраивающиеся
в) самоорганизующиеся
г) самообучающиеся.
Оптимальные САУ обеспечивают автоматическое поддержание наилучшего режима функционирования.
Самонастраивающиеся САУ способны изменять свои параметры при изменении внешних условий.
Самоорганизующиеся САУ способны изменять алгоритм работы, то есть система сама изменяет свою структуру.
Самообучающиеся САУ способны накапливать и обрабатывать информацию и на основе этого опыта совершенствовать свою структуру и способы управления.
III. По характеру действия САУ различают системы непрерывного и дискретного действия. В непрерывных САУ во всех звеньях выходной сигнал изменяется плавно при таком же изменении входного сигнала. В системах дискретного действия должно быть хотя бы одно звено у которого выходной сигнал изменяется дискретно при непрерывном изменении входного сигнала.
IV. По характеру преобразования сигнала различают
7
линейные и нелинейные САУ.
V. По характеру зависимости параметров САУ во времени
выделяют стационарные и нестационарные САУ.
VI. По количеству управляемых параметров -одномерные и многомерные САУ.
1.3. Программы и законы управления
САУ обычно осуществляют поддержание постоянного значения управляемого сигнала у(t), или его изменение по
определенному закону.
При этом программа либо задается заранее, либо изменяется во время эксплуатации в зависимости от конкретных условий.
Программы управления могут быть временными ( y=y(t)) или параметрическими ( y=y (S1,...,Sn), где S – физические параметры объекта управления).
Закон управления – это алгоритм формирования наиболее целесообразного сигнала управления z(t) (рис. 1.2), который должен обеспечить требуемую точность, устойчивость и качество процесса управления.
Математически закон управления определяется уравнением управляющего устройства.
Различают линейные и нелинейные законы управления. Для нелинейных законов управления пока не существует общей теории, однако нелинейные методы хотя и сложнее линейных, но позволяют существенно повысить точность и качество управления.
Принципы построения САУ изучает теория автоматического управления. При построении САУ действует блочно-иерархический подход к проектированию. В процессе разработки эффективной САУ решают задачи синтеза, анализа коррекции, экспериментального исследования и наладки САУ.
8
Под синтезом САУ понимают выбор схемы взаимодействия элементов САУ, их параметров и характеристик.
Требуется получить САУ, удовлетворяющую требованиям технического задания (ТЗ).
В ходе решения задачи анализа САУ по заданной структуре САУ определяют значения показателей эффективности системы и , в случае, если они не соответствуют требованиям ТЗ изменяют их с помощью методов коррекции.
Методы экспериментального исследования и наладки САУ позволяют наиболее рационально исследовать и построить систему в реальных условиях работы.
Чтобы получить систему, удовлетворяющую ТЗ, приходиться многократно просчитывать
различные вариантов схемы и параметров САУ, что соответствует итерациям структурной и параметрической оптимизации в рамках блочно-иерархического подхода.
САР представляет собой совокупность связанных между собой элементов.
Элементы, выполняющие основные функции, называются основными, а остальные – вспомогательными.
Элемент - это конструктивно обособленная часть схемы или системы, выполняющая определенную функцию. Элементы отличаются друг от друга физической природой, принципом действия, схемой включения, конструкцией и т.п.
По выполняемым функциям все элементы автоматически делят на датчики, усилители, двигатели, муфты, при этом в разных системах автоматически выполняется большое число основных функций.
Общим для всех элементов является передача поступающих на них сигналов в определенном направлении, преобразование сигнала по значению, характеру, и физической природе.
9
4. Основные элементы автоматики
Принято ввыделять основные элементы автоматики.
1. Датчики – устройства, которые различные
неэлектрические величины преобразуют в электрические сигналы.
2. Реле – это устройства, которые с помощью слабых сигналов управляют мощными электрическими цепями.
3. Усилители – устройства, которые усиливают входные сигналы, но не изменяют их физической природы.
4. Стабилизаторы – устройства поддерживающие постоянство выходных сигналов.
5. Исполнительные элементы – это устройства, которые путем преобразования подводимой к ним энергии приводят в действие какой-либо механизм или объект регулирования под воздействием управляющих сигналов.
6. Распределители – это устройства, которые обеспечивают поочередное подключение различных элементов или цепей к какому либо одному элементу или к одной точке
электрической цепи.
7. Вычислительные элементы выполняют математические и логические операции над электрическими или физическими величинами.
Все элементы автоматики различаются по физическим основам их действия электрические, электромеханические, тепловые, ферромагнитные, пневматические, гидравлические, ионные, электронные, радиоактивные.
Реле, усилители, стабилизаторы, распределители и вычислительные элементы обычно входят в состав устройств управления, датчики – в состав измерительных устройств. Далее будем рассматривать элементы, у которых хотя бы одна из величин ( входная или выходная ) является электрической.
10
Статические характеристики элементов САУ
Входной величиной элемента могут быть мгновенные значения физических величин, а также амплитудные и частотные значения синусоидальных или импульсных электрических величин.
Основные элементы систем могут работать как в статическом, так и в динамическом режиме.
При установившемся (статическом) режиме работы элементов входные и выходные сигналы постоянны по времени.
Свойства элементов определяются с помощью параметров и характеристик.
Параметр – это величина, характеризующая существенное свойство элемента.
Характеристика – это зависимость одной величины от другой. Для элементов , находящихся в установившемся режиме, используют статические переменные и характеристики.
Уравнение статики элементов имеет вид:
y=f(x) , (1.2)
где yy(t), xx(t).
Статические характеристики могут быть линейными и нелинейными. Чаще применяют элементы с линейной статической характеристикой, так как, при работе в широком
диапазоне изменения входных и выходных величин, линейные элементы позволяют создать САУ с одинаковыми динамическими и точностными характеристиками на всем диапазоне изменения сигналов.
Линейная статическая характеристика имеет вид:
y=kx+b, k=tg(a)=yx=dydx, (1.3)
где k – коэффициент передачи элемента.
11

Рис. 1.3
В линейном элементе коэффициент передачи постоянный
(k=const), а в нелинейном элементе k=k(x).
Если входные и выходные величины элемента имеют одинаковую физическую природу, то коэффициент k размерности не имеет и называется коэффициентом усиления.
Для датчика коэффициент передачи называется чувствительностью. Минимальное значение входной величины, которая может вызвать изменения выходного сигнала, или выходной величины, называется порогом чувствительности.
При изготовлении любого элемента САУ появляется статическая погрешность элемента. Статическая погрешность бывает трёх видов: абсолютная , относительная и приведенная.
Абсолютная статическая погрешность – это разность между номинальным и фактическим значением выходной величины
=|yном - y| . (1.4)
Относительная статическая погрешность обозначается
0=у (1.5)
и может быть расчитана в процентном отношении как 0 100 .
12
Приведенная статическая погрешность обозначается как
 =
(100)
(1.6)
=
(100)
(1.6)
уmax – ymin
где [ уmin , ymax]- границы поля допуска.
Если неизвестно действительное значение выходной величины у , то его можно найти как среднее арифметическое нескольких замеров выходной величины.
![]() (1.7)
(1.7)
В этом случае погрешность элемента определяется как максимальная относительная погрешность
![]() (1.8)
(1.8)
где х , у – приведенные погрешности приборов, на которых проводились измерения входных и выходных параметров соответственно, ymin – минимальное из измеренных значений yi,
max =max yi - ymin . (1.9)
i-1,…,N
Динамические характеристики элементов
В реальных САУ сигналы, как правило, изменяются во времени и системы работают в динамическом режиме ( x=x(t),
y=y(t) ). Для оценки работы элементов в динамическом режиме используют динамические характеристики ( частотную и
13
переходную ) и динамические параметры (например, постоянная времени элемента Т ).
Процесс перехода элемента из одного установившегося состояния в другое называется переходным процессом (частный случай динамического режима). Одним из важнейших динамических показателей элемента является его динамическая характеристика, то есть зависимость выходной величины от времени:
y=f(t) (1.10)
Характер изменения выходной величины зависит от свойств самого элемента и от характера изменения его входной величины. Поэтому для сравнения динамических свойств разных элементов надо подавать на входы одинаково меняющиеся во времени сигналы.
Реакция большинства элементов на скачкообразный входной сигнал (то есть переходная характеристика элемента ) представляет собой нарастающую экспоненту.
Входной сигнал имеет вид единичного скачка ( рис. 1.4 ).

Рис. 1.4
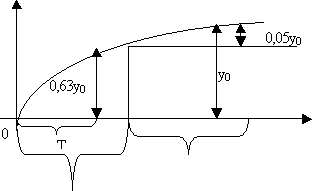
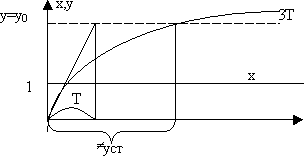
Переходная характеристика изображена на рис. 1.5,
на котором используются также следующие обозначения у0 - установившееся значение выходной величины, Т - постоянная времени, которая определяет интервал времени, в течении которого выходной сигнал достигает 63 от установившегося
14
значения. Чем меньше Т, тем круче будет график переходной характеристики, меньше длительность переходного процесса и меньше инерционность элемента, то есть элемент быстрее реагирует на изменение входного сигнала ( рис. 1.5 ).
Считается, что элемент находится в установившемся режиме, если значение выходной характеристики у отличается от установившегося значения у0 не больше чем на 5%.


переходный режим установившийся режим
Рис. 1.5
Различные элементы автоматики имеют различные графики переходных процессов, при этом различают 4 вида переходных процессов.
Переходный процесс без запаздывания (рис. 1.6).
y
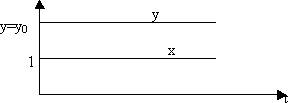 t
t
Рис. 1.6
15
Апериодический переходный процесс (рис. 1.7).
t
Рис. 1.7
Степень инерционности переходного процесса оценивается постоянной времени Т. Величину Т можно определить по графику переходной характеристики как расстояние по оси t от начала координат до абсциссы точки пересечения касательной к кривой переходного процесса, построенной в точке начала координат с прямой у=ууст.
Колебательно - затухающий процесс (рис. 1.8).
Рис. 1.8
При колебательно-затухающем переходном процессе значение у колеблется около установившегося значения с
16
постоянной частотой, равной 1 Т0, где Т0 - период колебаний с непрерывно убывающей амплитудой, tуст - интервал времени, в
течение которого выходной сигнал достигает значения, отличающегося от установившегося значения ууст не более чем на у. Величину tуст принято называть временем установления или длительностью переходного процесса.
4. Периодический переходный процесс (рис. 1.9).

Рис. 1.9
В любой момент времени t кривые выходного сигнала у(t) и входного сигнала х(t) имеют разность ординат. Абсолютная динамическая погрешность элемента
= yуст-y(t) . (1.11)
У большинства элементов абсолютная динамическая погрешность после входного скачкообразного сигнала не остаётся постоянной, а стремится к некоторому достаточно малому значению. Момент времени, когда называется моментом окончания переходного процесса. Длительность переходного процесса обычно 3Т.
17
ЛИНЕЙНЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ САУ
И ИХ ХАРАКТЕРИСТИКИ
-
Основные характеристиеи ЛДЗ
В рамках системного подхода САУ рассматривается как сложная система, состоящая из элементов автоматики. Элементы, из которых состоит линейная САУ, принято называть линейными динамическими звеньями (ЛДЗ) -
это наиболее общее и не зависящее от физической природы элемента представление.
Каждое звено характеризуется своим дифференциальным уравнением.
(d0pn + d1pn-1 + ... + dn)х вых=( m0pk + m1pk-1 + ... + mk )х вх, (2.1)
или
d(p) x вых = m(p) х вх, (2.2)
где d(p), m(p) - операторные полиномы от величины p=d/dt. Если дифференциальное уравнение звена составлено при нулевых начальных условиях, то символ р можно рассматривать как число.
Основной характеристикой каждого ЛДЗ является его передаточная функция, которую принято обозначать K(p) или W(p). W(p) находится из дифференциального уравнения звена
(2.1) при нулевых начальных условиях как отношение изображения по Лапласу выходного и входного сигналов
xвых(p)

 W(p)=
(2.3)
W(p)=
(2.3)
хвх(p)
18
Зная передаточную функцию звена, можно найти значение выходного параметра по значению входного параметра
xвых=W(p)xвх (2.4)
Для оценки динамических свойств звеньев используют временные и частотные характеристики.
2.2. Временные и частотные характеристики
Временные характеристики h(t) и g(t) называют переходной характеристикой и импульсной переходной характеристикой соответственно
Переходная характеристика h(t) – определяет реакцию звена на входной сигнал 1(t).

 t
-1
W(p)
t
-1
W(p)
h(t)= g(t) dt = L p , (2.5)
0
где L -1 - обратное преобразование Лапласа.
Другой важной характеристикой динамического звена является частотная характеристика. При подаче на вход звена гармонического воздействия
х вх= Авх sin (t) (2.6)
где А- амплитуда воздействия, а - его угловая частота, на выходе звена в установившемся режиме будет получена также гармоническая функция
x вых= Авых·sin(t+), (2.7)
19
отличающаяся от входного воздействия и по амплитуде и по фазе. Представим входную и выходную гармонические функции в экспоненциальном виде
х вх= Авх ejt
(2.8)
x вых= Авых· ejt+,
а частотную передаточную функцию получим, подставляя в
W(p)
выражение р=j,
j=![]() .
.
Выделим действительную и мнимую части частотной передаточной функции
W(j)=P()+jQ(), (2.9)
и запишем в экспоненциальном виде
W(j)=A()·еj, (2.10)
где A() – амплитуда (модуль частотной передаточной функции)
A()
=![]() (2.11)
(2.11)
![]()
()– аргумент (фаза) частотной передаточной функции
()=arg(W(j))=arctg![]() . (2.12)
. (2.12)
20
Для наглядного представления частотных свойств динамических звеньев используют частотные характеристики.
Амплитудно-частотная характеристика (АЧХ)
определяет зависимость амплитуды выходного сигнала от частоты колебаний при постоянной амплитуде входного сигнала.

Рис. 2.1
2. Фазовая частотная характеристика (ФЧХ) показывает фазовые сдвиги, вносимые звеном на разных частотах.

Рис. 2.2
21
3. Амплитудно - фазовая частотная характеристика
(АФЧХ, или годограф) объединяет АЧХ и ФЧХ при использовании их в качестве полярных координат.

Рис. 2.3
4. Иногда целесообразно использовать вещественную и мнимую частотные характеристики P() и Q() из формулы (2.9).
Связь между перечисленными частотными характеристиками определяется формулами (2.11) и (2.12), а также соотношениями
P()=A()cos (j) (2.13)
Q()=A()sin
(j)![]()
5. Наиболее удобными в использовании являются логарифмические частотные характеристики ЛАХ и ЛФХ.
22
Прологарифмируем выражение частотной передаточной функции (2.9).
ln(W(j))=ln(A()еj)=lnA()+j() (2.14)
Величину lnA(w) называют логарифмической амплитудной частотной характеристикой (ЛАХ), а () - логарифмической фазовой частотной характеристикой (ЛФХ).
Для построения ЛАХ используют формулу
L()=20lgA(). (2.15)
Величина L() выражается в децибелах. Децибел – это 0,1 бела, а бел – логарифмическая единица, которая соответствует десятикратному увеличению мощности (1 бел – в 10 раз, 2 бела – в 100 раз, 3 бела - в1000 раз).
ЛАХ строится в логарифмическом масштабе частот в стандартной логарифмической сетке (рис. 2.5).
По оси абсцисс откладывается угловая частота в логарифмическом масштабе, при этом отрезки оси , соответствующие изменению частоты в одинаковое число раз оказываются равными.
Интервал частот , отличающихся друг от друга в 10 друг от друга в 10 раз, называют декадой и обычно принимают за единицу логарифмического масштаба частот масштаба частот.
![]()
Рис. 2.4
23
Ось ординат может пересекать ось абсцисс в произвольном месте. Обычно располагают вертикальную ось так, чтобы с права от нее находился диапазон частот, существенных для данного устройства.
Главное достоинство логарифмического метода – это возможность построения частотных характеристик непосредственно по виду передаточной функции.Кроме того использование логарифмического масштаба позволяет охватить большой диапазон частот.
ЛАХ строится в координатной сетке, изображённой на
рис. 2.5.
 .
.
Рис. 2.5
ЛФХ строится в координатной сетке, изображённой на рис. 2.
24
град
Рис. 2.6
Рекомендуется совмещать две координатные сетки так, чтобы ось L(w)=0 ЛАХ совпадала с осью =-180.
. Основные типы ЛДЗ
2.3.1. Безынерционное звено описывается дифференциальным уравнением
хвых=k хвх , (2.15)
где k – коэффициент передачи (коэффициент усиления) звена.
Передаточная функция этого звена постоянна
W(р)=k. (2.16)
25
К безынерционным звеньям можно отнести делитель напряжения, а также электронный или полупроводниковый усилитель с пренебрежимо малой постоянной времени (звено мгновенно, без инерции, реагирует на подаваемый на вход единичный ступенчатый сигнал).
Переходная функция безынерционного звена -ступенчатая функция (рис. 2.7). Величина скачка равна k.

Рис. 2.7
Частотная передаточная функция безынерционного звена имеет вид
W(j)=k=k+j. (2.17)
P()=k (2.18)
Q()=0
 A()
=
k2
+
0
2 =
k, (2.19)
A()
=
k2
+
0
2 =
k, (2.19)
()=arctg(0/k)=0. (2.20)
(фазовые сдвиги отсутствуют, ЛФХ совпадает с осью частот и может не учитываться при расчётах)
ЛАХ безынерционного звена имеет вид
26
L()=20lgA()=20lgk. (2.21)
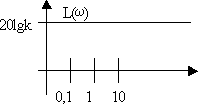
Рис. 2.8
2.3.2. Апериодическое звено (инерционное) описывается дифференциальным уравнением
(Tp+1)хвых=k хвых , (2.22)
где Т – постояннае времени звена.
Передаточная функция априодического звена
k
W(р)= Tp+1 . (2.23)
Примерами таких звеньев могут быть RC и RL цепи

Рис.2.9
Переходная функция h(t) имеет вид:
27
h(t)=k(1-e-t/T). (2.24)
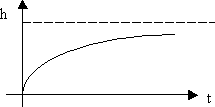
Рис. 2.10
Для построения ЛАХ и ЛФХ апериодического звена найдём частотную передаточную функцию звена
W(j)=k/(1+jT) , (2.25)
k T
Р()= , Q(t)= - . (2.26)
1+ 2 T2 1+ 2 T2
L()=20lg
А()
=![]() (2.27)
(2.27)
График ЛАХ апериодического звена строим приближённо. Находим сопрягающую частоту =1Т и наносим её на логарифмическую сетку. При малых частотах <1/T, T<1 и 2 T2. Следовательно, 1+ 2 T2 1 и можно считать, что L()=20lgk. При 1/T , T1 и 2 T2. Следовательно,
1+ 2 T2 2 T2 и можно считать, что L()20lgk-20lg(T). ЛФХ апериодического звена ()= - arctg(T). Таким образом, при <1/T график ЛАХ представляет собой прямую, параллельную оси частот, а при >1/Т график ЛАХ – это прямая с отрицательным углом наклона –20 дБ на декаду (рис. 2.11).
28
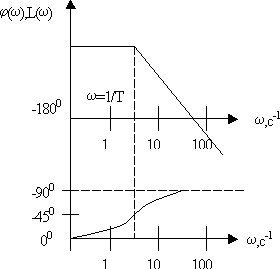
Рис. 2.11
2.3.3. Колебательное звено описывается дифференциальным уравнением
(T2р2+2cTр+1)xвых=kxвх, (2.28)
где 0<c<1 - параметр затухания.
Передаточная функция колебательного звена
k
W(р)= T2р2+2сTp+1 . (2.29)
Примером колебательного звеньев может быть RLС цепь, изображённая на рис. 2.12.
29
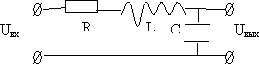
Рис. 2.12
Переходная функция колебательного звена имеет вид
h(t)=
k
 (2.30)
(2.30)
и её график приведён на рис. 2.13.
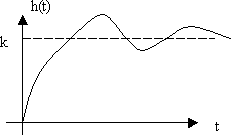
Рис. 2.13
Частотная передаточная функция имеет вид
k
W(j)= 1+2cjT-T22 . (2.31)
30
ЛАХ имеет вид
L ()=20
lg k-20 lg
()=20
lg k-20 lg
![]() (2.32)
(2.32)
При малых частотах (<1/T , 2 T2) L()=20 lg k. При
1/T и 2 T2 можно считать, что
L()20
lg
k
-
20
lg![]() (2.33)
(2.33)
Таким образом, можно приближенно считать, что ЛАХ колебательного звена представлят собой ломаную линию ABCD, состоящую из трёх прямолинейных участков на отрезке АВ это прямая, параллельная оси частот, на отрезке СD это прямая, имеющая угол наклона -40 дБ на декаду (рис. 2.11). Такую ломаную ЛАХ можно использовать при параметре затухания0,5<c<1,2. При других значениях с реальная ЛАХ будет сильно отклоняться от ломаной и пользоваться данным упрощением нельзя.

Рис. 2.14
31
Л
 ФХ
колебательного звена
()=
- arctg 2сT
и при
ФХ
колебательного звена
()=
- arctg 2сT
и при
1- 2 T2
диапазоне значений 0<c<1 имеют вид как на рис. 2.14.
2.3.4. Интегрирующее звено описывается дифференциальным уравнением
d xвых
 =
k xвх,
или рхвых=кхвх.
(2.34)
=
k xвх,
или рхвых=кхвх.
(2.34)
d хвх
Передаточная функция
k
 W(р)=
p
. (2.35)
W(р)=
p
. (2.35)
К интегрирующим звеньям можно отнести RC цепь
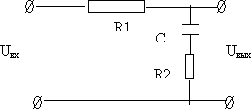
Рис. 2.15
Переходная функция интегрирующего звена имеет вид
h(t)=k t , (2.36)
её график приведён на рис. 2.16.
32

Рис. 2.16
Частотная передаточная функция
k
W(j) = j . (2.37)
ЛАХ имеет вид
L()=20 lg (k) . (2.38)
ЛФХ имеет вид ()=-90. Графики ЛАХ и ЛФХ интегрирующего звена приведены на рис. 2.17.
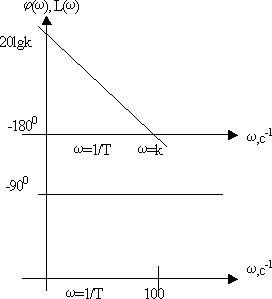
Рис. 2.17
33
2.3.5. Дифференцирующее звено описывается уравнением
хвых=k dхвх . (2.39)
dt
Передаточная функция идеального дифференцирующего звена имеет вид
W(р)=kp. (2.40)
На практике дифференцирующие звенья применяются в САУ для коррекции и в большинстве случаев реальные дифференцирующие звенья имеют передаточные функции вида
kр
W(р)= (2.41)
1+Тp .
Примером реального дифференцирующего звена является RC цепь вида
С






U вх R Uвых


Рис. 2.18
34
Легко видеть, сто реальное дифференцирующее звено представляет собой два последовательно включенных в цепь звена - идеальное дифференцирующее и апериодическое.
Переходная функция реального дифференцирующего звена
h(t)=ke-t/T. (2.42)
Т
График переходной функции приведён на рис. 2.19.
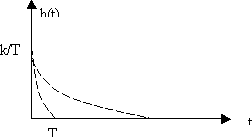
Рис. 2.19
Частотная передаточная функция имеет вид
kj
W(j)= 1+jt . (2.43)
ЛАХ имеет вид
L()=20lg(k)-20lg
![]() (2.44)
(2.44)
35
При малых частотах (<1/T , 2 T2) L()20 lg k (прямая с положительным углом наклона, АВ на рис. 2.20). При 1/T и 2 T2 можно считать, что
L()20 lg k - 20 lg Т , (2.45)
это прямая, параллельная оси частот (ВС на рис. 2.20).
Ломаная АВС есть приближенная ЛАХ дифферренцирующего звена, отличающаяся от действительной ЛАХ в точке излома на величину не более 3 дБ.

Рис. 2.20
ЛФХ дифференцирующего звена строится в соответствии с формулой
()= 90 - arctg(T). (2.46)
36
Из рассмотренных типовых звеньев элементарными являются безынерционное, интегрирующее и дифференцирующие. Все остальные звенья можно получить из элементарных звеньев, соединяя их между собой определенным образом. Звенья, у которых переходная функция своевременно
стабилизируется, называются устойчивыми (они описываются линейными дифференциальными уравнениями (ЛДУ) с положительными коэффициентами). Типовые звенья всегда устойчивы (кроме интегрирующего звена которое называется нейтральным). В неустойчивых звеньях переходный процесс является расходящимся и такие звенья описываются ЛДУ с отрицательными коэффициентами. Для устойчивых и неустойчивых звеньев одного типа амплитудные характеристики одинаковы, а фазовые - различны. Сдвиг фазы в устойчивом звене меньше, чем в неустойчивом.
2.4. Способы соединения звеньев САУ
При исследовании САУ можно разбить систему на комбинацию динамических звеньев с известными передаточными функциями. Будем считать динамические звенья направленными и независимыми, т.е. такими, сигналы которых проходят от входа к выходу, а подключение последующих звеньев не влияет на характер переходных и установившихся процессов предыдущих звеньев. В САУ существует 3 способа соединения звеньев:
1. Последовательное.
2. Параллельное.
3. С обратной связью (ОС).
![]()
Рис. 2.21
37
Последовательное соединение изображено на рис. 2.21. При последовательном соединении звеньев выходной сигнал предыдущего звена является входным сигналом для последующего звена, а результирующая передаточная функция равна произведению передаточных функций отдельных звеньев.
W(р)=W1(р)W2(р)*...*Wn(P)=![]() (2.27)
(2.27)
При параллельном соединении (рия. 2.22) на вход всех звеньев подается общий сигнал , а на выходе образуется сигнал, являющийся суммой выходных сигналов звеньев.

Рис. 2.22
Результирующая передаточная функция является суммой передаточных функций звеньев.
W(р)=
W1(р)+W2(р)+...+Wn(P)=
![]() (2.28)
(2.28)
При соединении с ОС выходной сигнал первого звена является входным для второго, причем входной сигнал первого
38
звена образуется в результате сложения или вычитания входного сигнала и выходного сигнала второго звена.
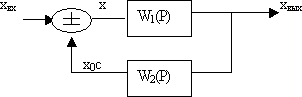
Рис. 2.23
Передаточная функция системы при соединении с обратной связью рассчитывается по формуле
W1(р)
 W(р)=
(2.29)
W(р)=
(2.29)
1 W1(р) W 2 (р)
где знак минус в (2.29) ставится при положительной обратной связи, а плюс - при отрицательной обратной связи.
Если второе звено в цепи обратной связи отсутствует, то
W1(р)
W(р)= . (2.30)
1 W1(р)
Таким образом, имея структурную схему САУ и зная передаточные функции звеньев, можно найти передаточную функцию САУ и проводить с её помощью исследование САУ на точность, быстродействие и устойчивость.
39
3. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ
Понятие устойчивости
Любая САУ характеризируется переходным процессом,
который возникает при выходе системы из состояния равновесия из-за некоторого воздействия. Переходный процесс x(t) зависит от свойств самой системы и от вида возмущающего воздействия. В переходном процессе можно выделить две составляющие:
x(t)=xв(t)+xсв(t) (3.1)
где xв(t) - движение САУ, определяемое возмущающим воздействием и свойствами самой системы, а xсв(t) – свободные движения системы, определяемые начальными условиями и свойствами самой системы. Основной динамической характеристикой САУ является ее устойчивость. Устойчивость – это свойство системы возвращаться к состоянию установившегося равновесия после устранения возмущения, которое вывело систему из этого состояния.
Например, иллюстрацией неустойчивого состояния является рис. 3.1 ( при малейшем воздействии шарик теряет устойчивость).
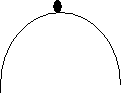
Рис. 3.1
40
Пример устойчивого при любых воздействиях состояния на рис. 3.2.
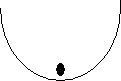
Рис. 3.2
Возможно также состояние неустойчивого равновесия, при котором система сохраняет устойчивость только при малых воздействиях (рис. 3.3).




Рис. 3.3
Математическая постановка задачи
Математически САУ будет устойчивой, если
lim xсв(t)=0 , (3.2)
t
в противном случае система неустойчива.
41
Свободное движение системы описывается дифференциальным уравнением , которое для линейных САУ имеет вид
![]() =
0,
(3.3)
=
0,
(3.3)
где коэффициенты а i постоянны (i=1,...,n). Решение дифференциального уравнения (3.3) имеет вид :
хсв(t)= c 1 exp(p1t) + c 2 exp(p2t) +...+ c n exp(pnt) (3.4)
где ci , i=1,…,n постоянные интегрирования , которые определяют из начальных условий, а рi , i=1,…,n корни характеристического уравнения САУ.
Характеристическое уравнение имеет вид:
a 0 р n + a 1 р n-1 +...+ a n-1 р + а n = 0 . (3.5)
В зависимости от вида корней уравнения (3.5) переходный процесс будет затухающим или расходящимся и, соответственно, система будет устойчивой или неустойчивой.
Оценка устойчивости САУ по корням характеристического уравнения
При оценке устойчивости необходимо рассмотреть три возможных случая.
1. Корни вещественны.
2. Пары комплексно- сопряженных корней.
3. Корни чисто мнимые.
Если все корни вещественные и отрицательные, т.е.
42
р i = - i, i= 1,…,n, a i >0
в этом случае
хсв(t)=![]() .
(3.6)
.
(3.6)
Если все корни вещественные и отрицательные, то каждое слагаемое хсв в формуле (3.6) стремится к нулю при t и, следовательно, хсв(t) 0, то есть необходимое и достаточное условие устойчивости (3.2) выполнено и САУ устойчива.
Если все корни вещественные, но среди них имеется хотя бы один положительный корень р к = к 0 , то соответствующее ему слагаемое в (3.6) будет иметь вид ск exp(кt) и будет стремиться к при t.
При этом, хотя все слагаемые в хсв(t) , кроме одного, будут затухать, переходный процесс САУ в целом будет расходящимся, а САУ - неустойчивой.
Если все корни вещественные, отрицательные и есть пара комплексно- сопряженных корней р k =-+j . р k+1=--j. Тогда комплексным корням в Хсв(t) соответствуют слагаемые А= ск exp[-(-j)t] и B= ск exp[-(+j)t]. C учётом формул Эйлера можно записать
А+В= De-a tsin(t+). (3.6)
Сумма слагаемых, соответствующих комплексно-сопряжённым корням, представляет собой гармоническую функцию с угловой частотой и амплитудой De-a t.
Параметр - это параметр затухания огибающей k – кривой переходного процесса.
43
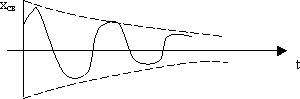 при
0
при
0
Рис. 3.4

при >0
Рис. 3.5
Таким образом, если дейчтвительная часть комрлексного корня , САУ устойчива, в противном случае - нет.
В случае чисто мнимы корней и р к =j . р k+1=-j.
Составляющая, соответствующая данным корням в хсв(t) имеет вид
скexp(j)+скexp(-j)=Аsin(t+). (3.7)
Таким образом, имеем незатухающие колебания с угловой частотой и постоянной амплитудой А (рис. 3.6).
44
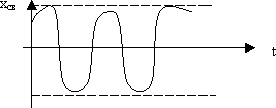
Рис. 3.6
Таким образом, можно сформулировать критерий устойчивости для устойчивости линейных САУ необходимо и достаточно, чтобы все вещественные корни и все вещественные части комплексных корней характеристического уравнения (3.5) были отрицательными, а если хотя бы один вещественный
корень или вещественная часть хотя бы одной пары комплексных корней положительны, то переходный процесс будет расходящимся и САУ будет неустойчивой.


 Re(Pi)
Re(Pi)
Рис. 3.7
45
Наглядно графически необходимые и достаточные условия устойчивоси САУ можно представить, изобразив корни (3.5) в комплексной плоскости. Для устойчивости САУ необходимо и достаточно чтобы все корни лежали в левой полуплоскости (рис. 3.7). Если корни находятся на мнимой оси, то говорят, что САУ находится на границе устойчивости.
На практике большинство САУ являются нелинейными, т.е. реальные характеристики звеньев и реальные дифференциальные уравнения приближенно заменяем линейными. Закономерность такого подхода обосновал Ляпунов. Справедливы три теоремы линеаризации.
1. Если линеаризованая система устойчива, то устойчива исходная нелинейная система.
Если линеаризованая система неустойчива, то неустойчива исходная нелинейная система.
Если линеаризованая система находится на границе
устойчивости , то для определения устойчивости исходной нелинейной системы нужно провести дополнительные исследования с целью проверки lim xсв(t)=0.
t
Алгебраические критерии устойчивости
Проверка устойчивости САУ путем вычисления корней характеристического уравнения (3.5) не всегда возможна из-за высокого порядка решаемых уравнений. На практике использует алгебраические и частотные критерии устойчивости.
Критерий Гурвица – алгебраический критерий, он позволяет судить об устойчивости САУ на основе анализа коэффициентов характеристического уравнения (3.5).
46
Система с характеристическим уравнением (3.5) будет устойчивой, если определитель Гурвица n и все его диагональные минорыn-1.,n-2 , … ,1 положительны при а 0 .
Для того, чтобы найти определитель Гурвица, нужно построить матрицу Гурвица.



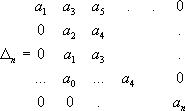 (3.8)
(3.8)
Матрица Гурвица заполняется по следующему правилу по столбцам относительно главной диагонали. Сначала выписывают коэффициенты на главную диагональ. Ниже главной диагонали записывают коэффициенты с уменьшением индекса, а выше - с увеличением.
Диагональные миноры рассчитываются так
1 =| а1|,
а1 а3
2= а0 а2 = а1а2 - а3 а0
и т.д.
Условием нахождения САУ на границе устойчивости является, что n=0, а все остальные диагональные миноры положительны.
Недостатки критерия Гурвица заключаются в следующем.
1. Для систем при n>5 (более высокого порядка) критерии Гурвица требуют анализа очень громоздких выражений, т.е. при n>5 данный критерий практически не используется.
2. Критерии Гурвица не позволяет выделять неустойчивое звено в системе (определить причину неустойчивости САУ).
47
Частотные критерии устойчивости САУ
Частотные критерии основаны на изучении связи между формой частотной характеристики САУ и характером распределения корней характеристического уравнения в комплексной плоскости. Наибольшее применение нашли два критерия:
критерий Михайлова
критерий Найквиста.
Критерий устойчивости Михайлова был предложен в 1938 году. Это графический критерий устойчивости, суть которого заключается в следующем.
Если характеристическое уравнение замкнутой САУ имеет вид
a0 pn + a1 pn-1 + … + an-1 p + an = 0 , (3.9)
то, представив левую часть равенства (3.9) в виде функции
D(p)= a0 pn + a1 pn-1 + … + an-1 p + an
и подставив в неё p= j, получим уравнение комплексного вектора
D(j)= a0 (j) n + a1 (j) n-1 + … + an-1 (j) + an.
D(j) задаёт комплексный вектор, который при изменении угловой частоты колебаний от 0 до опишет на комплексной плоскости
некоторую кривую – годограф, или кривую Михайлова.
Для построения кривой Михайлова необходимо в D(j) выделить действительную и мнимую части:
D(j)= U()+jV(),
48
где
U() = a n – a n-2 2 + a n-4 4 - …
V() = a n-1 – a n-3 3 + a n-5 5 a - a n-7 7 + …
(n-чётное).
Например, при n=8 получим ( с учётом j2=-1 )
D(j)= a0 (j) 8 + a1 (j) 7 + … + a7(j) + a8 =
(a0 8 - a2 6 + a4 4 - a2 2+ a8) + j (a7 - a5 3 + a3 5 - a1 7).
Далее, задаваясь различными значениями частоты =1,2,…
Вычислим координаты точек годографа D(j):
при =0 U()=a n , V()=0;
при jV().
Рассмотрим случай n=1.
D(p)= a0 p + a1 ,
D(j)=a0 (j)+ a1.
Действительная часть постоянна U(a1
j V
n=1
V
n=1

U
0
a1

Рис. 3.8
49
Рассмотрим случай n=2.
D(p)= a0 p2 + a1p +a2,
D(j)= a0(j)2 + a1(j)+ a2 =[ a2 -a02]+j(a1)
Действительная часть U(=a2 -a02.a1
Мнимая часть V()=a1.
При =0 V=0, U= a2.
П
 ри
=a2/a0
U= 0, V=a1a2/a0
ри
=a2/a0
U= 0, V=a1a2/a0
.
j
 V
V

 n=2
n=1
n=2
n=1
n =3
=3

 U
U
0


an
n=5
n=4
Кривые Михайлова для устойчивых систем
Рис. 3.9
Критерий Михайлова формулируется так. Система n-го порядка будет устойчива, если годограф, начинаясь на действительной оси при U, огибает против часовой стрелки
50
начало координат, проходя последовательно ровно n квадрантов (четвертей комплексной плоскости).
Для устойчивых САУ кривая Михайлова всегда имеет плавную спиралевидную форму, уходящую в бесконечность в том квадранте комплексной плоскости, номер которого соответствует степени n характеристического уравнения системы. Более n квадрантов кривая Михайлова для уравнения n-го порядка пройти не может, поэтому неустойчивость САУ всегда связана с нарушением последовательного обхода квадрантов.Пример кривой Михайлова для неустойчивой САУ
jV

n=3
U
0
an
Кривые Михайлова для неустойчивой системы
Рис. 3.10
Условием нахождения САУ на границе устойчивости является прохождение кривой Михайлова через начало координат.
Для оценки устойчивости замкнутой САУ по известной АФЧХ разомкнутой системы используют критерий, предложенный в 1932 году американским учёным Найквистом.
51
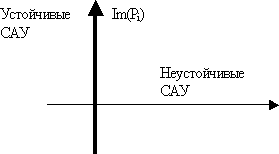
При этом необходимая АФЧХ может быть получена как аналитически, так и экспериментально. Разомкнутая САУ может быть устойчивой, неустойчивой или находиться на границе устойчивости. Если САУ состоит из устойчивых звеньев, то она будет устойчивой в разомкнутом состоянии. При наличии хотя бы одного неустойчивого звена разомкнутая система будет неустойчивой. При наличии в САУ интегрирующего звена система будет находиться на границе устойчивости. Критерий Найквиста формулируется так. Чтобы замкнутая САУ была устойчивой, необходимо и достаточно выполнение следующих условий
1)при устойчивой разомкнутой САУ, или находящейся на границе устойчивости, АФЧХ при изменении от до не должна охватывать точку с координатами (-1, j0);
2)при неустойчивой разомкнутой САУ АФЧХ должна охватывать точку (-1, j0) столько раз, сколько корней характеристического уравнения разомкнутой САУ лежит справа от мнимой оси комплексной плоскости.
jV
 =0
U
=0
U
-1 0
Рис. 3.11
52
Возможно также определение устойчивости САУ по логарифмическим характеристикам. Будем оценивать устойчивость САУ по амплитудной логарифмической частотной характеристике L() и по фазовой характеристике ().
Если разомкнутая САУ устойчива, то для устойчивости замкнутой САУ необходимо и достаточно, чтобы во всех областях положительной ЛАХ (L() разность между числом положительных и отрицательных переходов фазовой характеристики () через линию –1800 равнялась нулю.

L()
 a
b
a
b



l
l

a-точка перечечения L() с осью частот;
b-точка пересечения () с осью частот;
- запас устойчивости по фазе;
l-запас устойчивости по амплитуде
Рис. 3.12
Если точка a расположена левее точки b, в положительной области ЛАХ число переходов () через линию ()=-180 равно нулю. Система устойчива.
53
 Если точка b
расположена левее точки a, в области
положительной ЛАХ есть один переход
фазовой характеристики через ось
()=-180,
следовательно, система неустойчива.
Если точка b
расположена левее точки a, в области
положительной ЛАХ есть один переход
фазовой характеристики через ось
()=-180,
следовательно, система неустойчива.

L()
()
1