

Учебное пособие 1441
.pdfФГБОУ ВО «Воронежский государственный технический университет»
Кафедра физики
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
по физике к теме «Механические колебания и упругие волны» для студентов всех технических направлений и специальностей очной формы обучения
Воронеж 2017
1
Составители: канд. физ.-мат. наук Н.В. Агапитова, д-р физ.-мат. наук А.В. Бугаков, д-р физ.-мат. наук Е.В. Шведов УДК 537
Методические указания по физике к теме «Механические колебания и упругие волны» /ФГБОУ ВО «Воронежский государственный технический университет»; сост. Н.В. Агапитова, А.В. Бугаков, Е.В. Шведов Воронеж, 2017. 35 с.
Методические указания содержат необходимый теоретический материал по одному из важных вопросов курса общей физики: «Механические колебания и волны в упругой среде». Приведены примеры некоторых колебательных систем и расчет их основных характеристик. Предложены примеры решения задач.
Предназначены для студентов всех технических направлений и специальностей очной формы обучения.
Методические указания подготовлены в электронном виде и содержатся в файле Мет.указ.pdf.
Ил. 21. Библиогр.: 6 назв.
Рецензент д-р физ.-мат. наук, проф. С.Б. Кущев
Ответственный за выпуск зав. кафедрой физики профессор Т.Л. Тураева
Издается по решению учебно-методического совета Воронежского государственного технического университета
© ФГБОУ ВО «Воронежский государственный технический университет, 2017
2
ПРЕДИСЛОВИЕ
Как показывает опыт преподавания, студенты более охотно пользуются методическими разработками по различным темам курса, нежели «большой» учебной литературой. Более сжатое, лаконичное изложение отдельных вопросов предмета оказывается для студента предпочтительнее. Однако, компактное изложение материала не должно быть чрезмерно упрощённым и содержать пробросы важных элементов теории. Всё это налагает высокие требования к разработке методических указаний.
Впредлагаемых методических указаниях вопросы механических колебаний и упругих волн изложены предельно кратко, но наряду с этим, сохраняют должный уровень содержания, отвечающий стандартной вузовской программе по общему курсу физики.
Вметодических указаниях представлены примеры решения ряда задач, иллюстрирующие кинематику и динамику колебательных движений.
1
МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ. УПРУГИЕ ВОЛНЫ
1. МЕХАНИЧЕСКИЕ КОЛЕБАНИЯ
1.1. Гармонические колебания
Колебаниями называются движения или процессы, характеризующиеся той или иной степенью повторяемости во времени. В зависимости от физической природы повторяющегося процесса в физике выделяются колебания механические, электромагнитные, а в сложных колебательных системах могут быть те и другие.
Рассмотрим основные вопросы теории механических колебаний. Простейшими по характеру колебаний являются гармонические колебания, при которых колеблющаяся величина изменяется по закону синуса или косинуса. Физическая система, совершающая периодические колебания называется осциллятором (от латинского «oscillo» - качаюсь).
Идеализированные системы, в которых колебания возникают за счет первоначально сообщенной энергии при отсутствии последующих внешних воздействий, называются
гармоническими осцилляторами. Примерами гармонических осцилляторов являются пружинный, математический и физический маятники совершающие малые колебания. Колебания, возникающие в таких системах при отсутствии сил трения, называются собственными гармоническими колебаниями.
Рассмотрим кинематику гармонического колебания. Смещение системы от положения равновесия определяется формулой
x = A cos ( 0 t + о) . |
(1) |
где x - смещение материальной точки в произвольный момент времени от своего положения равновесия, A - амплитуда колебаний, т.е. максимальное отклонение от положения
2
равновесия; = 0 t + о - фаза колебаний; о - начальная фаза.
Периодом колебаний Т называется время одного полного колебания, или время, за которое фаза колебаний получает приращение, равное 2 . Определим его из следующего усло-
вия: 0 t + T + = 0t + + 2 , откуда T = 2 / .
Число колебаний в единицу времени называется частотой колебаний и обозначается буквой . Частота и период колебаний – взаимно обратные величины, т.е. = 1/T . За единицу частоты принимается частота такого колебания, период которого равен 1 сек. Эту единицу называют герцем (Гц). Таким образом, эти величины связаны соотношениями
|
|
|
|
|
|
|
|
= 2 /T = 2 . |
|
(2) |
|||
Величину называют круговой или циклической, |
т.е. дает |
||||||||||||
число колебаний за 2 секунд. |
|
|
|
||||||||||
Зная смещение (1), определяем скорость |
|
|
|||||||||||
|
|
v = |
dx |
= - A 0 sin( 0 |
t + ) , |
|
(3) |
||||||
|
|
||||||||||||
и ускорение |
|
|
|
|
dt |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
a = |
dv |
= |
|
|
d2x |
= - A cos ( 0 |
t + ) = - 02x. |
(4) |
|||||
|
|
|
|
||||||||||
|
dt |
|
|
|
|
dt2 |
|
|
|
||||
Из (4) получаем |
|
|
|
||||||||||
|
|
d |
2 |
x |
|
.. |
|
|
|||||
|
|
|
+ 02x = 0 или x + 02x = 0 |
|
(5) |
||||||||
|
|
dt2 |
|
||||||||||
|
|
|
|
|
|
|
|
||||||
Уравнение (5) |
называется дифференциальным уравне- |
||||||||||||
нием гармонических колебаний. Общее решение этого уравнения имеет вид (1).
На рис.1 представлены зависимости смещения, скорости и ускорения для гармонических колебаний.
Простейшим примером системы, совершающей гармонические колебания, является пружинный маятник - материальная точка массой m на невесомой пружине с коэффициентом жесткости k.
3
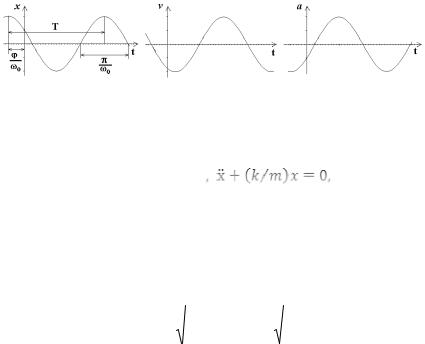
Рис.1 Выведем маятник из положения равновесия и предоста-
вим систему самой себе. По II закону Ньютона ma F , где сила определяется законом Гука. Тогда
|
(6) |
mx kx |
где m - масса материальной точки, k - коэффициент жесткости пружины. Обозначив 02 = k/m, получаем дифференциальное уравнение гармонических колебаний (5), общее реше-
ние которого определяется формулой (1), |
а 0 определяет |
|||||||||
циклическую частоту |
собственных колебаний пружинного |
|||||||||
маятника. Таким образом, для пружинного маятника |
||||||||||
0 |
|
|
k |
|
, T 2 |
|
m |
|
. |
(7) |
|
|
|
||||||||
|
|
|
m |
k |
|
|||||
1.2. Энергия гармонического колебания
Используя выражение скорости (3), определим кинетическую энергию гармонического осциллятора
Ek |
mv2 |
mA2 o2 sin2( ot ) |
|
||
|
|
|
(8) |
||
2 |
2 |
||||
|
|
|
|||
Потенциальная энергия выражается формулой:
Ek |
|
kx |
2 |
|
kA2 cos2( ot ) |
(9) |
2 |
|
2 |
||||
|
|
|
|
|
Складывая (8) и (9) с учетом (7), получим полную энергию колебания:
4

E = E k + Ep = |
mA2 0 |
2 |
. |
(10) |
|
|
|||
2 |
|
|
|
|
Таким образом, полная энергия гармонического колебания является величиной постоянной. Этого и следовало ожидать, так как квазиупругая сила является консервативной.
1.3. Маятники
Маятник – это твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной точки или оси.
Наиболее известными |
являются математи- |
|
ческий и физический маятники. |
|
|
Математическим |
маятником |
назы- |
вают идеализированную систему, состоя- |
||
щую из невесомой и нерастяжимой нити, на |
||
которой подвешена масса, сосредоточенная в одной |
точке |
|
(рис.2.). |
|
|
При отклонении маятника от положения равновесия на угол возникает вращательный момент М = - mgl sin (m – масса маятника, l – длина маятника).
Поэтому так же, как смещению и квазиупругой силе, моменту М и угловому смещению нужно приписывать противоположные знаки. По основному закону динамики враща-
тельного движения имеем уравнение |
|
ml2 =- mgl sin , |
(11) |
где ml2 – момент инерции маятника,  - угловое ускорение. Ограничимся рассмотрением малых колебаний. В этом случае можно положить sin . Введя обозначение g/l = 02, получаем дифференциальное уравнение гармонических колебаний + 02 = 0, общее решение которого имеет вид
- угловое ускорение. Ограничимся рассмотрением малых колебаний. В этом случае можно положить sin . Введя обозначение g/l = 02, получаем дифференциальное уравнение гармонических колебаний + 02 = 0, общее решение которого имеет вид
= A cos( 0t+ о), где А и о - постоянные, определяемые начальными условиями возбуждения колебаний.
5
Таким образом, при малых колебаниях математический маятник колеблется по гармоническому закону. Период колебаний математического маятника
T 2 |
l |
(12) |
|
g |
|||
|
|
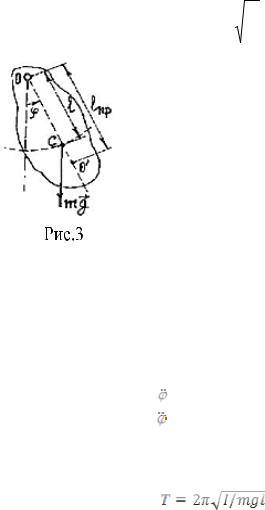
Физический маятник – твердое те-
ло, совершающее под действием силы тяжести колебания вокруг горизонтальной неподвижной оси, не проходящей через центр тяжести тела. При отклонении маятника от положения равновесия на некоторый угол возникает момент силы тяжести, стремящийся вернуть маятник в положение равновесия.
Этот момент равен M = - mgl sin , где
m - масса маятника, а l– расстояние от центра тяжести С тела до оси вращения О (рис.3.). Знак « - » имеет тоже значение, что и в случае формулы (11). Обозначив момент инерции маятника относительно оси О буквой I, можно написать дифференциальное уравнение колебаний физического маятника
I +mgl sin =0, |
(13) |
или при малых углах + 02 =0, где |
|
02 = mgl/I, |
(14) |
а период колебаний физического маятника определяется выражением
. |
(15) |
Из сопоставления формул (12) и (15) следует, что мате- |
|
матический маятник с длиной |
|
L = I / ml |
(16) |
6 |
|
будет иметь такой же период колебаний, как и данный физический маятник.
Величину (17) называют приведенной длиной физического маятника. Таким образом, приведенная длина физического маятника – это длина такого математического маятника, период колебаний которого совпадает с периодом данного физического маятника.
Точка на прямой, соединяющей точку подвеса с центром инерции, расположенная на расстоянии приведенной длины от оси вращения, называется центром качания физического маятника. (см. т. О’ на рис. 3). Точка подвеса и центр качания являются взаимозаменяемыми, т.е. если маятник подвесить за центр качания О’, то его период не изменится и прежняя точка О станет новым центром качания.
1.4. Сложение колебаний одного направления
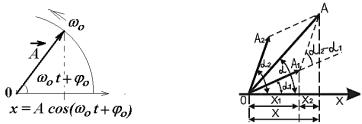
Для графического представления гармонических колебаний используется метод вращающегося вектора амплитуды или метод векторных диаграмм (рис.4).
Рис.4 Рис.5 Введем ось Х и из точки О, взятой на этой оси, отложим век-
тор длины А, образующий с осью угол . Если привести вектор А во вращение с угловой скоростью 0, то проекция этого вектора на ось х будет изменяться со временем по закону x = A cos ( 0t+ о). Следовательно, гармоническое колебание может быть задано с помощью вектора амплитуды.
7

Такое представление позволяет просто и наглядно определить результат сложения двух гармонических колеба-
ний одинакового направления и одинаковой частоты: |
|
x1=А1cos( 0t+ 1), x2= A2cos( 0t+ 2) |
(17) |
Представим оба колебания с помощью векторов |
|
(рис.5). Построим по правилу сложения векторов результирующий вектор 
 . Проекция этого вектора на ось х равна сумме проекций слагаемых векторов: x = x1+x2
. Проекция этого вектора на ось х равна сумме проекций слагаемых векторов: x = x1+x2
Вектор 
 будет характеризовать результирующее коле-
будет характеризовать результирующее коле-
бание. Этот вектор вращается с той же угловой скоростью 0, как и векторы 





 , так что результирующее движение
, так что результирующее движение
будет гармоническим колебанием с частотой 0, амплитудой А и начальной фазой . Из рис.5. видно, что
A2 = A12+A22+2A1A2 cos( 2- 1) |
(18) |
||
tg |
A1 sin 1 A2 sin 2 |
|
(19) |
A1 cos 1 A2 cos 2
1.5.Сложение взаимно перпендикулярных колебаний
Пусть материальная точка совершает колебания в двух взаимно перпендикулярных направлениях, например, вдоль координатных осей Х и У. Уравнения соответствующих колебаний при этом будут следующими
x = а cos t, y = b cos( t+ ) |
(20) |
Уравнения (20) в параметрической форме задают траекторию, по которой движется тело. Чтобы получить уравнение траектории в обычном виде, нужно исключить из уравнений (20) параметр t (время). Проделаем несложные математические преобразования, представляя:
8