

Задание 3. Исследование свободных колебаний механической системы с одной степенью свободы
Схемы
систем показаны на рис. 3.1 – 3.3, а
необходимые данные приведены в табл.
6. Приняты следующие обозначения: 1
– груз массой
![]() ;
2
– блок массой
;
2
– блок массой
![]() и радиусом
и радиусом
![]() (сплошной однородный диск); 3
– блок массой
(сплошной однородный диск); 3
– блок массой
![]() и радиусом инерции
и радиусом инерции
![]() ;
4
– сплошной однородный диск массой
;
4
– сплошной однородный диск массой
![]() и радиусом
и радиусом
![]() ;
5
– диск массой
;
5
– диск массой
![]() и радиусом инерции
и радиусом инерции
![]() ;
6
– тонкий однородный стержень массой
;
6
– тонкий однородный стержень массой
![]() и длиной
и длиной
![]() ;
7
– стержень, масса которого не учитывается;
;
7
– стержень, масса которого не учитывается;
![]() – коэффициент жесткости пружины;
– коэффициент жесткости пружины;
![]() – начальное отклонение груза 1
по вертикали от положения покоя,
соответствующего статической деформации
пружины;
– начальное отклонение груза 1
по вертикали от положения покоя,
соответствующего статической деформации
пружины;
![]() – проекция начальной скорости
– проекция начальной скорости
![]() груза 1
на вертикальную ось.
груза 1
на вертикальную ось.
На рис. 3.1 – 3.3 системы тел 1 – 7 показаны в положении покоя (при статической деформации пружин).
В вариантах 5, 6, 14 и 23 стержень 6 жестко соединен с диском 4.
Определить частоту и период малых свободных колебаний механической системы с одной степенью свободы, пренебрегая силами сопротивления и массами нитей.
Найти
уравнение движения груза 1
![]() ,
приняв за начало отсчета положение
покоя груза 1
(при статической деформации пружин).
Найти амплитуду колебаний груза 1.
,
приняв за начало отсчета положение
покоя груза 1
(при статической деформации пружин).
Найти амплитуду колебаний груза 1.
Указания. Это задача на применение к изучению движения механической системы уравнений Лагранжа II рода для консервативной системы сил. В задаче механическая система имеет одну степень свободы, ее положение определяется одной обобщенной координатой и для нее должно быть составлено одно уравнение движения.
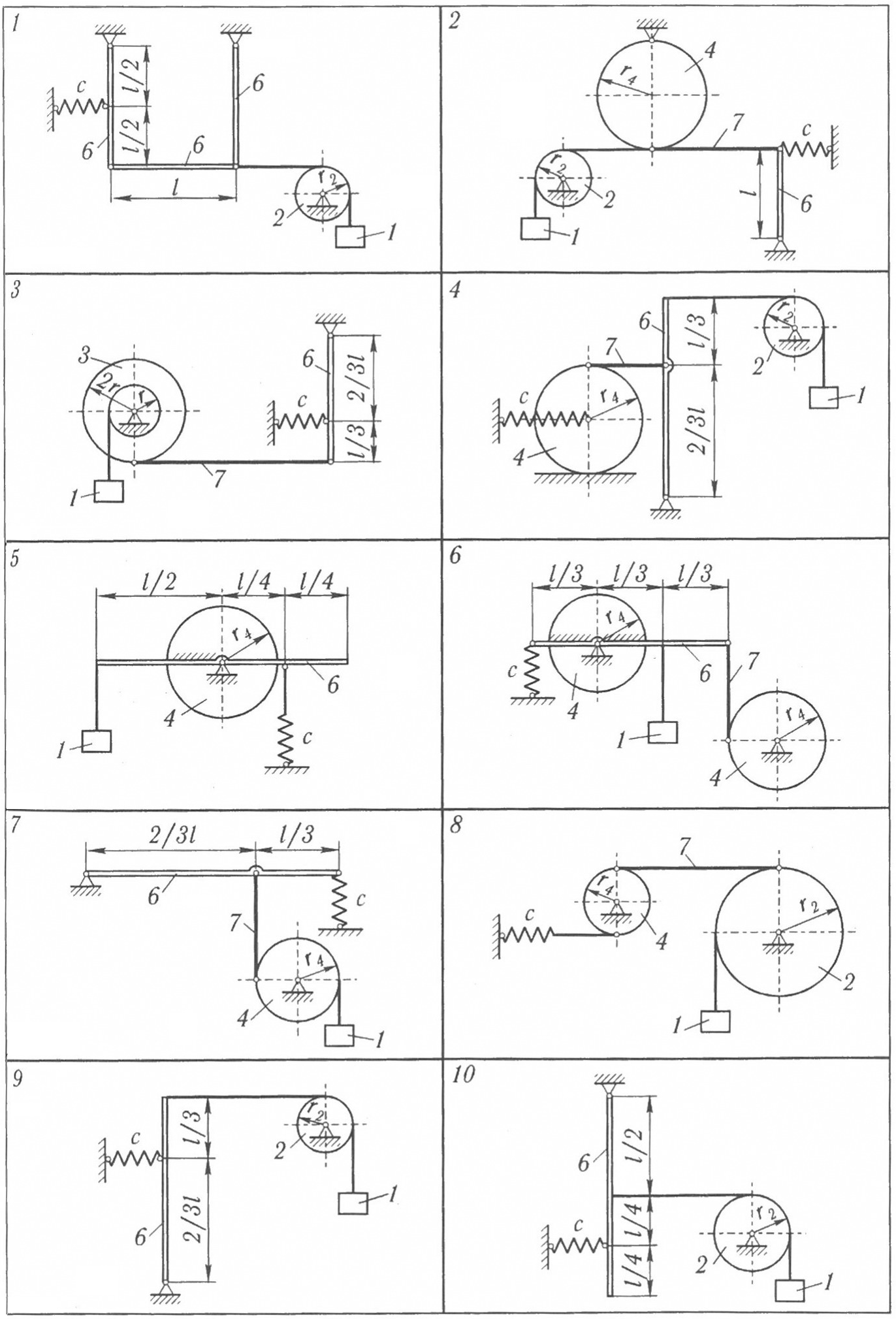
Рис. 3.1

Рис. 3.2

Рис. 3.3
Таблица 5. Расчетные данные к заданию 3
№ |
|
|
|
|
|
|
|
|
|
Начальные условия
( |
|
м |
кг |
Н/см |
см |
см/с |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,5 |
– |
– |
– |
1 |
2 |
– |
3 |
40 |
0,1 |
5 |
|
|
0,5 |
– |
– |
0,2 |
1 |
2 |
2 |
3 |
40 |
0 |
6 |
|
|
0,5 |
|
– |
– |
1 |
– |
4 |
3 |
20 |
0,2 |
7 |
|
|
0,6 |
– |
– |
– |
1 |
2 |
3 |
2 |
36 |
0,2 |
0 |
|
|
0,6 |
– |
– |
0,15 |
1 |
– |
3 |
3 |
16 |
0 |
8 |
|
|
0,6 |
– |
– |
0,15 |
1 |
– |
1 |
1 |
40 |
0,3 |
7 |
|
|
– |
– |
– |
– |
1 |
– |
2 |
2 |
40 |
0,4 |
0 |
|
|
– |
– |
– |
– |
1 |
3 |
2 |
– |
40 |
0 |
6 |
|
|
0,6 |
– |
– |
– |
1 |
2 |
– |
3 |
38 |
0,5 |
5 |
|
|
0,6 |
– |
– |
– |
1 |
2 |
– |
3 |
32 |
0 |
6 |
|
|
– |
– |
– |
– |
1 |
2 |
– |
3 |
30 |
0,4 |
7 |
|
|
0,5 |
– |
– |
– |
1 |
2 |
– |
3 |
20 |
0,2 |
0 |
|
|
0,3 |
– |
– |
– |
1 |
1 |
1 |
2 |
32 |
0 |
8 |
|
|
0,4 |
– |
– |
0,1 |
1 |
– |
2 |
3 |
20 |
0 |
7 |
|
|
0,4 |
|
– |
– |
1 |
– |
2 |
2 |
20 |
0,1 |
0 |
|
|
– |
– |
– |
– |
1 |
2 |
3 |
– |
32 |
0,3 |
6 |
|
|
– |
– |
– |
– |
1 |
2 |
– |
2 |
20 |
0 |
5 |
|
|
– |
– |
– |
– |
1 |
2 |
1 |
– |
40 |
0 |
6 |
|
|
0,2 |
– |
– |
– |
1 |
1 |
– |
1 |
32 |
0,1 |
0 |
|
|
0,5 |
– |
– |
– |
1 |
2 |
– |
3 |
20 |
0,4 |
7 |
|
|
– |
– |
– |
– |
1 |
– |
2 |
3 |
32 |
0 |
8 |
|
|
– |
|
|
– |
1 |
2 |
4 |
– |
40 |
0,1 |
7 |
Таблица 5 (окончание) |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,4 |
– |
– |
0,2 |
1 |
2 |
2 |
3 |
40 |
0,3 |
0 |
|
|
– |
– |
|
– |
1 |
– |
3 |
2 |
40 |
0 |
6 |
|
|
0,3 |
– |
– |
0,1 |
1 |
2 |
2 |
1 |
40 |
0,2 |
5 |
|
|
– |
|
– |
– |
1 |
– |
2 |
– |
40 |
0,3 |
0 |
|
|
– |
– |
|
– |
1 |
2 |
3 |
– |
40 |
0 |
6 |
|
|
– |
– |
|
– |
1 |
2 |
3 |
– |
40 |
0,2 |
0 |
|
|
– |
– |
|
– |
1 |
2 |
3 |
– |
40 |
0 |
7 |
|
|
– |
– |
|
– |
1 |
2 |
3 |
– |
40 |
0,3 |
7 |
В
качестве обобщенной координаты выбирается
координата
![]() ,
характеризующая перемещение груза 1.
Для составления уравнения Лагранжа
необходимо найти кинетическую энергию
системы
,
характеризующая перемещение груза 1.
Для составления уравнения Лагранжа
необходимо найти кинетическую энергию
системы
![]() и выразить все входящие в нее скорости
через обобщенную скорость
и выразить все входящие в нее скорости
через обобщенную скорость
![]() .
Затем надо вычислить потенциальную
энергию системы
.
Затем надо вычислить потенциальную
энергию системы
![]() как сумму работ сил системы на перемещении
из отклоненного положения системы в
начальное. Дальнейший ход решения задачи
разъяснен в примере 3.
как сумму работ сил системы на перемещении
из отклоненного положения системы в
начальное. Дальнейший ход решения задачи
разъяснен в примере 3.
Пример 3.
Механическая
система (рис. 3.4) состоит из груза 1
массой
;
блока
2
(сплошного однородного диска) массой
и радиусом
;
тонкого однородного стержня 3
массой
![]() и длиной
;
сплошного однородного диска 4
массой
и радиусом
.
Система начинает двигаться из положения
покоя (
при
статической деформации пружины с
коэффициентом жесткости
)
с начальным отклонением
груза 1
по вертикали от положения покоя и
проекцией
его начальной скорости
.
и длиной
;
сплошного однородного диска 4
массой
и радиусом
.
Система начинает двигаться из положения
покоя (
при
статической деформации пружины с
коэффициентом жесткости
)
с начальным отклонением
груза 1
по вертикали от положения покоя и
проекцией
его начальной скорости
.
Д
Рис. 3.4![]() кг,
кг,
![]() кг,
кг,
![]() кг,
кг,
![]() кг,
кг,
![]() м,
м,
![]() Н/см,
Н/см,
![]() см,
см,
![]() см/с.
см/с.
Определить:
циклическую частоту
и период
![]() малых свободных колебаний системы,
получить уравнение движения
груза 1
и найти амплитуду
малых свободных колебаний системы,
получить уравнение движения
груза 1
и найти амплитуду
![]() его колебаний.
его колебаний.
Решение:
Рассмотрим произвольное положение системы, когда она выведена из состояния равновесия и совершает малые колебания (рис. 3.4). Механическая система имеет одну степень свободы. В качестве обобщенной координаты выберем координату перемещения груза 1. Поскольку все действующие активные силы (силы тяжести и сила упругости) потенциальные, воспользуемся уравнением Лагранжа II рода для консервативной системы:
![]() , (3.1)
, (3.1)
где и – кинетическая и потенциальная энергии системы, соответственно.
При
исследовании малых колебаний в уравнении
сохраняют малые величины
,
![]() в первой степени, отбрасывая малые более
высокого порядка. Для этого надо найти
выражения для
и
с точностью до
в первой степени, отбрасывая малые более
высокого порядка. Для этого надо найти
выражения для
и
с точностью до
![]() ,
,
![]() ,
так как в уравнение (3.1) входят первые
производные от
и
по
и
,
а при дифференцировании многочлена его
степень понижается на единицу.
,
так как в уравнение (3.1) входят первые
производные от
и
по
и
,
а при дифференцировании многочлена его
степень понижается на единицу.
Определим кинетическую энергию всей системы, равную сумме кинетических энергий всех тел:
![]() . (3.2)
. (3.2)
Груз 1 движется поступательно, блок 2 и стержень 3 вращаются вокруг неподвижной оси, диск 4 совершает плоскопараллельное движение, поэтому
![]() ,
,
![]() ,
,
![]() ,
,
![]() . (3.3)
. (3.3)
Моменты инерции блока 2 и стержня 3 относительно оси вращения и диска 4 относительно центральной оси имеют вид:
![]() ,
,
![]() ,
,
![]() . (3.4)
. (3.4)
Скорости
![]() ,
,
![]() и угловые скорости
и угловые скорости
![]() ,
,
![]() и
и
![]() тел системы выразим через обобщенную
скорость
:
тел системы выразим через обобщенную
скорость
:
![]() ,
,
![]() ,
,
![]() . (3.5)
. (3.5)
Скорость
и угловую скорость
найдем, учитывая, что рассматриваются
малые колебания (значит
![]() )
и диск 4
катится без скольжения (точка
)
и диск 4
катится без скольжения (точка
![]() – мгновенный центр скоростей тела 4):
– мгновенный центр скоростей тела 4):
![]() . (3.6)
. (3.6)
Учитывая соотношения (3.3) – (3.6) приведем выражение (3.2) к виду:
![]() . (3.7)
. (3.7)
Так как кинетическая энергия зависит только от , производные левой части уравнения (1) примут вид:
![]() ;
;
![]() ; (3.8)
; (3.8)
![]() .
.
Н
 айдем
потенциальную энергию
системы (см. рис. 3.5) как сумму работ сил
тяжести тел системы и силы упругости
пружины на перемещении из отклоненного
положения системы (когда груз 1
имеет координату
)
в начальное (состояние покоя):
айдем
потенциальную энергию
системы (см. рис. 3.5) как сумму работ сил
тяжести тел системы и силы упругости
пружины на перемещении из отклоненного
положения системы (когда груз 1
имеет координату
)
в начальное (состояние покоя):
![]() , (3.9)
, (3.9)
г
Рис. 3.5![]() и
и
![]() – потенциальные энергии, соответствующие
силам тяжести тел
системы и силе упругости пружины
на перемещении.
– потенциальные энергии, соответствующие
силам тяжести тел
системы и силе упругости пружины
на перемещении.
![]() , (3.10)
, (3.10)
где – вертикальное смещение центра тяжести стержня.
Вычислим его с точностью до величины второго порядка малости относительно обобщенной координаты (см. рис. 3.5):
![]() . (3.11)
. (3.11)
Учитывая
малость
угла
,
разложим
![]() в ряд Тейлора:
в ряд Тейлора:
![]() (3.12)
(3.12)
Ограничиваясь в разложении (3.12) двумя первыми членами и учитывая, что
![]() ,
,
получаем из (3.11):
![]() . (3.13)
. (3.13)
Подставив (3.13) в (3.10) находим:
![]() . (3.14)
. (3.14)
Потенциальная энергия деформированной пружины 3 равна
![]() , (3.15)
, (3.15)
где
![]() – статическая деформация пружины 3,
соответствующая начальному отклонению
груза 1
по вертикали от положения покоя;
– статическая деформация пружины 3,
соответствующая начальному отклонению
груза 1
по вертикали от положения покоя;
![]() – перемещение точки прикрепления
– перемещение точки прикрепления
![]() пружины 3,
соответствующее координате
груза
1.
пружины 3,
соответствующее координате
груза
1.
Из рис. 3.4 определяем
![]() ,
,
откуда
![]() . (3.16)
. (3.16)
Таким образом, потенциальная энергия пружины 3
![]() , (3.17)
, (3.17)
а потенциальная энергия механической системы
![]()
![]() (3.18)
(3.18)
Учитывая, что в состоянии покоя, соответствующем статической деформации пружины 3
![]() ,
,
![]() , (3.19)
, (3.19)
приводим (3.18) к виду:
![]() (3.20)
(3.20)
У равнение
3.19 можно также получить, составив одно
из условий равновесия системы сил для
положения покоя (см. рис. 3.6):
равнение
3.19 можно также получить, составив одно
из условий равновесия системы сил для
положения покоя (см. рис. 3.6):
![]() :
:
![]() или
или
![]() .
.
Отсюда
![]() .
.
В
Рис. 3.6
![]() , (3.21)
, (3.21)
Подставим (3.8) и (3.21) в (3.1):
![]() (3.22)
(3.22)
или, обозначив
 , (3.23)
, (3.23)
приведем (3.22) к виду:
![]() . (3.24)
. (3.24)
Уравнение (3.24) является уравнением свободных колебаний с частотой . Подставив в (3.23) численные значения, находим:
![]() с–1. (3.25)
с–1. (3.25)
Период свободных колебаний
![]() с. (3.26)
с. (3.26)
Интегрируя уравнение (3.24), находим уравнение движения груза 1:
![]() . (3.27)
. (3.27)
Для
определения
констант интегрирования
![]() и
и
![]() составим уравнение скорости груза 1:
составим уравнение скорости груза 1:
![]() (3.28)
(3.28)
и воспользуемся начальными условиями:
при
![]()
![]() ,
,
![]() . (3.29)
. (3.29)
Из уравнений (3.27) – (3.29) находим:
![]() ,
,
![]() .
.
И окончательно:
![]() м. (3.30)
м. (3.30)
Уравнение
(3.30) можно представить в эквивалентной
форме, если использовать другие константы
интегрирования
и
![]() :
:
![]() ,
,
![]() .
.
Тогда
![]() ,
,
![]() м,
(3.31)
м,
(3.31)
![]() рад.
рад.
Таким образом
![]() м.
м.
Ответ:
с–1,
![]() с,
с,
![]() м,
м.
м,
м.