

ГОУВПО «Воронежский государственный технический университет»
Кафедра робототехнических систем
Методические указания
к лабораторным работам № 8–10 по дисциплине «Исполнительные системы роботов» для студентов специальности 220402 «Роботы и робототехнические системы» очной и очно-заочной форм обучения
Воронеж 2010
Составители: канд. техн. наук С.С. Ревнёв,
канд. техн. наук В.А. Трубецкой
УДК 681.527.2:621.865.8
Методические указания к лабораторным работам № 8-10 по дисциплине «Исполнительные системы роботов» для студентов специальности 220402 «Роботы и робототехнические системы» очной и очно-заочной форм обучения / ГОУВПО «Воронежский государственный технический университет»; сост. С.С. Ревнёв, В.А. Трубецкой. Воронеж, 2010. - 27 с.
В методических указаниях определен порядок исследований влияния структурных особенностей, законов регулирования и параметров устройств на статические и динамические свойства систем воспроизведения движений роботов. По каждой из лабораторных работ даются теоретические пояснения, предварительное, рабочее задание, методические рекомендации, требования к отчёту, контрольные вопросы.
Методические указания подготовлены на магнитном носителе в текстовом редакторе Microsoft Word 2003 и содержатся в файле ЛР_8_10_ИСР_2010.doc.
Предназначены для студентов 4 курса очной формы обучения, 5 курса очно-заочной формы обучения.
Ил. 5. Библиогр.: 10 назв.
Рецензент канд. техн. наук, доц. А.К. Муконин
Ответственный за выпуск зав. кафедрой д-р техн. наук, проф. А.И. Шиянов
Издается по решению редакционно-издательского совета Воронежского государственного технического университета
© ГОУВПО «Воронежский государственный
технический университет», 2010
ГОУВПО «Воронежский государственный
технический университет», 2010
ЛАБОРАТОРНАЯ РАБОТА № 8
ИССЛЕДОВАНИЕ ОДНОКОНТУРНОЙ ИСПОЛНИТЕЛЬНОЙ СИСТЕМЫ УПРАВЛЕНИЯ СКОРОСТЬЮ С НАСТРОЙКОЙ НА МОДУЛЬНЫЙ ОПТИМУМ
1. Цель работы
Получение навыков расчета и практической реализации оптимальных настроек; экспериментальные исследования статических и динамических свойств одноконтурной однократно интегрирующей системы при техническом (модульном) оптимуме.
2. Теоретические пояснения
Средством повышения быстродействия и точности управления выходной и промежуточными координатами (переменными) любого объекта является их регулирование с ООС. Однако включение ООС не является условием достаточным. Может существенно уменьшится устойчивость и демпфированность. Для высокого качества регулирования требуются определенные частотные свойства контура, образуемого ОС. Их коррекцию называют настройкой.
Настройку контуров каждой из переменных
удобно выполнять с помощью включенных
последовательно в цепь прямой связи
активных корректирующих устройств
- регуляторов. На вход регулятора
подается рассогласование по переменной
данного контура. Регулятор преобразует
по определенному закону это рассогласование
в сигнал управления объектом. Настройку
можно рассматривать как выбор такой ПФ
регулятора
![]() ,
которая позволит получить необходимую
ПФ контура в замкнутом состоянии
,
которая позволит получить необходимую
ПФ контура в замкнутом состоянии
![]() и соответствующую ей ПФ разомкнутого
контура
и соответствующую ей ПФ разомкнутого
контура
![]() .
.
Несложная реализация регулятора
получается, если объект контура -
простейшее динамическое звено. В
неизменяемой части - в объекте - часто
удается выделить такое звено, имеющее
большую постоянную времени
![]() .
Если остальные постоянные объекта
.
Если остальные постоянные объекта
![]() малы (их сумма не превышает половины
),
то постоянная
считается основной, подлежащей
компенсации при настройке.
малы (их сумма не превышает половины
),
то постоянная
считается основной, подлежащей
компенсации при настройке.
Для практического расчета настройки, т.е. для выбора передаточной функции регулятора и определения его параметров можно воспользоваться таким правилом. Контур считают состоящим из двух частей - регулятора с ПФ и неизменяемой части с ПФ
![]() .
(1)
.
(1)
В
![]() учитывают свойства всех динамических
звеньев с малыми постоянными времени.
Статические свойства цепи ООС учитывают
отдельно величиной
учитывают свойства всех динамических
звеньев с малыми постоянными времени.
Статические свойства цепи ООС учитывают
отдельно величиной
![]() .
Далее выбирают критерий настройки,
определяющий
.
После этого вид и параметры ПФ регулятора
определяют, учитывая, что
.
Далее выбирают критерий настройки,
определяющий
.
После этого вид и параметры ПФ регулятора
определяют, учитывая, что
![]() .
(2)
.
(2)
Наиболее распространенным критерием является модульный оптимум (МО).
При настройке контуров высокодинамичных ИС необходима их оптимизация прежде всего по быстродействию (при практическом отсутствии перерегулирования), а также по точности воспроизведения предписанного значения регулируемой координаты и минимальном ее отклонении из-за возмущений. Условия такой оптимальной настройки определяются модульным или амплитудно-частотным критерием, называемым также техническим оптимумом. Настройка на МО превращает замкнутый контур в колебательное звено второго порядка с передаточной функцией
![]() ,
(3)
,
(3)
для
которой коэффициент демпфирования
![]() =
0,707. Для получения
=
0,707. Для получения
![]() необходимо, чтобы в разомкнутом
состоянии
необходимо, чтобы в разомкнутом
состоянии
![]() .
(4)
.
(4)
Нетрудно видеть, что свойства настроенного на МО контура не зависят от наибольшей постоянной времени.
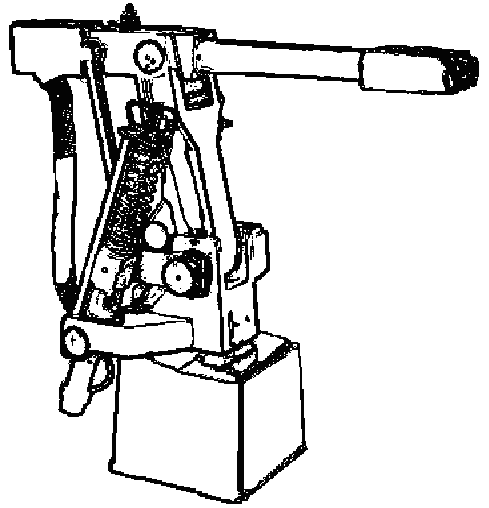
В качестве примера рассмотрим расчет настройки на МО одноконтурной системы ШИП-Д с управлением по скорости, показанной на рис.1.
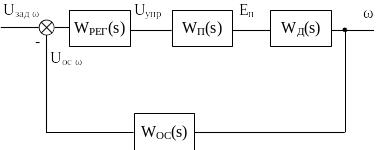
Рис.1. Одноконтурная система ШИП-Д
В общем случае двигатель является
апериодическим звеном второго порядка
(![]() )
и его можно представить как последовательное
соединение звеньев
)
и его можно представить как последовательное
соединение звеньев
![]() с малой и
с малой и
![]() с большой постоянными времени, т.е.
с большой постоянными времени, т.е.
![]() ,
(5)
,
(5)
где
![]() - меньшая,
- меньшая,
![]() -
большая постоянные,
-
большая постоянные,
![]() .
.
Преобразователь, а также звено в цепи ОС, являются звеньями с малыми постоянными времени
![]() ,
(6)
,
(6)
![]() ,
(7)
,
(7)
если
![]() .
Инерционности этих звеньев компенсации
не подлежат. В результате
.
Инерционности этих звеньев компенсации
не подлежат. В результате
![]() .
(8)
.
(8)
Тогда ПФ регулятора
 ,
(9)
,
(9)
где
![]() ,
,
![]() .
.
В данном случае для настройки контура на МО необходим ПИ-регулятор с указанными выше и .