

44. Методы получения отрицательных индуктивностей и емкостей.
Положительная
емкость(просто емкость) имеет комплексную
проводимость,
![]() где угол 90 указывает что ток опережает
напряжение на 90 градусов. В отрицательной
емкости сохраняется та же частотная
зависимость проводимости но изменяется
сдвиг фаз между напряжением и током,
т.е. ток отстает от напряжения на угол,
равный 90 градусов.
где угол 90 указывает что ток опережает
напряжение на 90 градусов. В отрицательной
емкости сохраняется та же частотная
зависимость проводимости но изменяется
сдвиг фаз между напряжением и током,
т.е. ток отстает от напряжения на угол,
равный 90 градусов.
Положительная
индуктивности имеет косплексное
сопротивление,
![]() где угол 90 указывает, что напряжение
опережает ток на 90. В отрицательной
индукктивности сохраняется та же
частотная зависимость проводимости но
изменяется сдвиг фаз между напряжением
и током, т.е. ток отстает от напряжения
на угол, равный 90 градусов.
где угол 90 указывает, что напряжение
опережает ток на 90. В отрицательной
индукктивности сохраняется та же
частотная зависимость проводимости но
изменяется сдвиг фаз между напряжением
и током, т.е. ток отстает от напряжения
на угол, равный 90 градусов.
Иначе говоря, частотные зависимости у отрицательной емкости и индуктивности такие же, как у положительных, а сдвиги фаз отличаются на 180 градусов.
Таким образом, отрицательная индуктивность является показателем емкостного реактивного сопротивления, а отрицательная емкость - показателем индуктивной проводимости цепей.
Конверторы отрицательных сопротивлений позволяют получить отрицательные емкости, индуктивности, и диссипативные сопротивления.
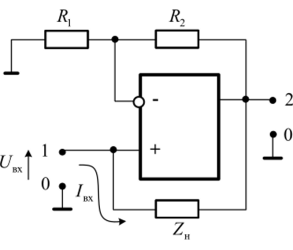
Схема КОС
45. Вах, вебер-амперные и кулон-вольтные характеристики s- и n-типов.
46. Возникновение падающих участков на характеристиках.
47. Двухполюсник с отрицательным входным сопротивлением.
Важная особенность отрицательных сопротивлений - возможность нейтрализовать с их помощью активную составляющую комплексного сопротивления и тем самым повысить его эквивалентную добротность. Особенно эффективным при этом является тот случай, когда активная составляющая комплексного сопротивления значительно превышает реактивную и применение известных методов измерения комплексных сопротивлений не дает желаемого результата.
Представляет интерес применение управляемых отрицательных сопротивлений в электромагнитной дефектоскопии и структуроскопии для компенсации активных потерь как в самом датчике, так и в экране, что позволяет значительно увеличить чувствительность к полезному контролируемому параметру. Компенсация активных потерь двухполюсников может быть сведена к упрощенной схеме, когда параллельно сопротивлению потерь включается отрицательное сопротивление. Получающееся при этом эквивалентное активное сопротивление
оказывается больше каждого из включенных и в пределе при полной компенсации равно бесконечности.
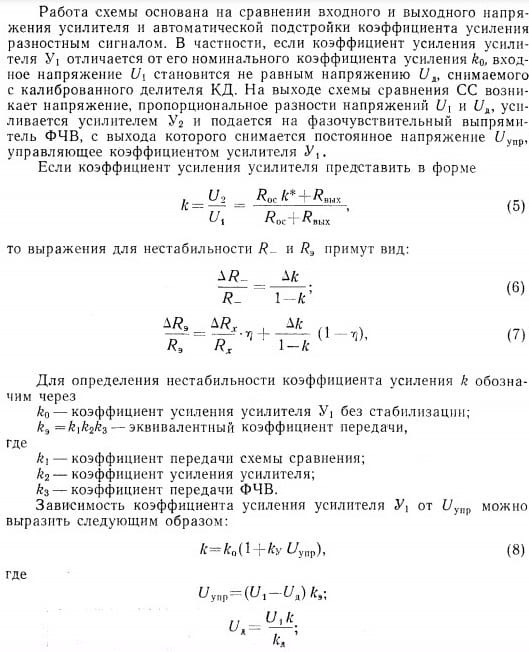
Из всех известных элементов с падающим участком вольтам-перной характеристики наиболее подходящим, с энергетической точки зрения, динамического диапазона и возможности управления является усилитель, охваченный глубокой положительной обратной связью (ПОС). Входное сопротивление такого усилителя оказывается отрицательным (рис. 1) и равным

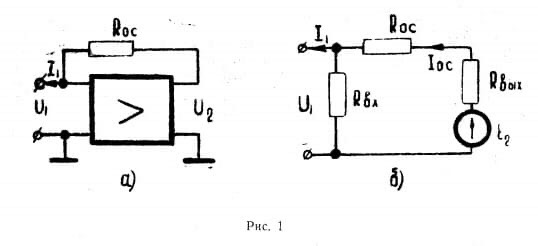
Основным недостатком отрицательных сопротивлений на основе
усилителей с ПОС является большая нестабильность

что ограничивает возможность использовать их в измерительной технике. Особенно сильно нестабильность R - сказывается на величину R
48. Основы теории устойчивости. Виды устойчивости.
Режим работы электрической цепи, содержащей нелинейные элементы, может быть устойчивым или неустойчивым. Как правило, режим работы большинства электрических цепей является устойчивым и в значительно меньшем числе случаев — неустойчивым.
Различают устойчивость «в малом» и устойчивость «в большом».
Под устойчивым режимом работы «в малом» понимают такой, при котором достаточно малое отклонение режима работы от исходного (установившегося) — независимо от того, какими причинами оно вызвано, — с течением времени уменьшается и система возвращается в исходное состояние.
При неустойчивом режиме работы «в малом» достаточно малое отклонение с течением времени увеличивается и система не возвращается в исходное состояние.
Устойчивым режимом работы «в большом» называют такой режим работы, при котором система, получив достаточно большое начальное отклонение, возвращается в исходное состояние после прекращения действия возмущения.
Если при достаточно большом отклонении от исходного состояния после прекращения действия возмущения система не возвращается в исходное состояние, то ее называют системой, неустойчивой «в большом».
Различие между устойчивостью «в малом» и устойчивостью «в большом» можно проиллюстрировать с помощью рис. 17.1, а. На этом рисунке изображены желоб с помещенным в нем шариком. Если шарик толкнуть так, что он переместится из положения 1 в положение 2, а затем предоставить его себе самому, то под действием силы тяжести шарик возвращается в исходное положение (положение равновесия).
Рис. 17.1
Если шарик толкнуть с большей силой, то он пройдет через положение 3 и выскочит из желоба. Таким образом, система (рис. 17.1, а) устойчива «в малом» и неустойчива «в большом».
В
литературе можно встретить также термин
«устойчивость по Ляпунову». Системой,
устойчивой по Ляпунову, называют систему,
для которой можно указать область
допустимых отклонений [область  на
рис. 17.1, б] от состояния равновесия (точки
0), для которой ни одно из движений,
начинающихся внутри области
на
рис. 17.1, б] от состояния равновесия (точки
0), для которой ни одно из движений,
начинающихся внутри области
 ,
никогда не достигнет границ некоторой
заданной области е.
,
никогда не достигнет границ некоторой
заданной области е.
Размер и форма области зависит от размера и формы области е.
В нелинейных электрических цепях в общем случае возможны следующие режимы (типы движения): 1) состояние равновесия; 2) периодическое движение при отсутствии в системе источников периодической ЭДС (тока) — автоколебания; 3) периодическое движение с частотой источника периодической ЭДС (тока) — вынужденные колебания; 4) резонансные явления на высших, низших и дробных гармониках; 5) квазипериодические (как бы периодические) процессы по типу автомодуляции, а также ряд других, более сложных типов движений. Каждый из этих режимов (типов движений) может быть исследован на устойчивость.
В большинстве практических задач производят исследование устойчивости «в малом». Исследование устойчивости «в большом» производят путем анализа хода интегральных кривых на фазовой плоскости или путем использования второго метода Ляпунова. Основы теории устойчивости были разработаны крупнейшим русским математиком А. М. Ляпуновым в 1892 г. и изложены в его книге «Общая задача об устойчивости движения».