

Вероятностный показатель надёжности_21_05_2019
.docxВероятностный показатель ненадёжности
Приведем
пример вероятностного показателя
времени наработки на отказ. Например,
“за время работы 3 года вероятность
отказа составит не менее 95%”. Т.е., за 3
года работы должны поломаться не более
5% устройств данного типа, то есть из 100
устройств, подобных данному, есть большая
вероятность, что 5 может поломаться в
течение 3 лет. Надежность компьютерных
компонентов определяется следующим
образом. Наработку на отказ определяют
на основании заявленной надёжности
используемых компонентов, кратковременных
интенсивных испытаний партии изделий
и сложных многофакторных расчетов,
учитывающих множество меняющихся во
времени причин, которые влияют на термин
надежности изделия. Схематически это
выглядит так. В течение года тестировалось
1000 изделий. За время теста 10 вышло из
строя. Отсюда MTBF будет равно 1год х
(1000шт/10шт) = 100 годам = 876580 часам (1 год =
8765.8 часов). Производитель округлит и
напишет 900000 часов, потому что продавец
все равно даст гарантию 2-3 года. 900000
часов – это срок, по истечению которого
существует высокая вероятность того,
что изделие из данной серии выйдет из
строя. MTBF приводят в часах, а не в годах,
что является стандартом. Покажем разницу
между 1000000 и 500000 часами. В первом случае
все устройства выйдут из строя за 114
лет, а во втором случае - за 57 лет. На
практике первая цифра говорит о том,
что вероятность выхода из строя в первый
год эксплуатации равна 1/100 лет = 0,01, т.е.
один из ста, а во втором случае поломаются
в первый же год два из ста. Кому-то
обязательно не повезет. Но это «не
повезет» должно произойти в течение
гарантийного срока. Наибольшие затраты
по выявлению дефектов производитель
несет при производстве изделия. Именно
на этом этапе возможна максимальная
экономия средств, т.е. удешевление
продукции и за счет этого повышение ее
конкурентоспособности, а значит и
прибыли. Это добавляет дополнительный
фактор, снижающий качество продукции.
Производитель опирается на результаты
натурных стрессовых испытаний и
математического моделирования. Данные
исследования проводятся независимыми
лабораториями, с выдачей сертификатов,
и эти данные мы уже читаем, как декларируемый
ресурс изделия. Но результаты исследований
дают на выходе только вероятность выхода
из строя. Какие-то экземпляры устройств
могут прожить значительно дольше срока
MTBF, и мы с этим иногда сталкиваемся, но
вероятность такого события после
окончания MTBF резко падает со временем.
Годовой гарантии хватает для учета
поломки из-за заводских дефектов. Из
практических исследований известно,
что наибольшая часть комплектующих
отказывает или в первый год эксплуатации
или через несколько лет на стадии уже
начавшегося износа. Но следует помнить,
что хорошего товара пики максимальной
вероятности выхода из строя приходятся
на первый год и на год износа в будущем,
но эта вероятность такова, что экономически
все равно выгодно остается давать 2-3
годичный гарантийный срок. Например,
если на ПК 1 год гарантии, то это значит,
что товар не высокого качества. Приведем
вариант расчета параметра MTBF для
нескольких вариантов роботов, в
конструкции которых используются
обычные комплектующие с заданным уровнем
гарантии. Сначала рассмотрим схему с
параллельным функционированием датчика
расстояния. 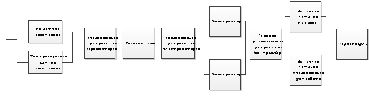
Рис.1 Структурная схема надежности с параллельным функционированием датчиков расстояния.
Расчет проводился для трёхколёсного робота, на промежутке в один год непрерывной работы, что представлено в таблице 1. ВБР рассчитывалась для параллельной схемы соединения, с учетом параллельного функционирования датчиков ИК и УЗ, двух электромоторов, источника питания моторов и источника питания управляющих устройств. Получаем следующую формулу расчета ВБР, исходя из непрерывной работы робота в течение года.
 2
2 2
2 2
2 (1)
(1)
Тогда выполнив расчет получим, что Р Как видно из результатов расчета,
вероятность безотказной работы достаточно
низкая. Это обусловлено низкими
характеристиками гарантийных обязательств
производителей. На самом деле уровень
надежности на порядок выше, но это можно
лишь установить с помощью проведения
экспериментов и дополнительного
тестирования оборудования.
Как видно из результатов расчета,
вероятность безотказной работы достаточно
низкая. Это обусловлено низкими
характеристиками гарантийных обязательств
производителей. На самом деле уровень
надежности на порядок выше, но это можно
лишь установить с помощью проведения
экспериментов и дополнительного
тестирования оборудования.
Таблица 1
Характеристики надежности трехколесного робота с параллельным функционированием датчиков препятствия
|
№ п.п. |
Название подсистемы |
MTBF |
λ |
ВБР |
|
1 |
Датчики препятствия |
25000 |
4,00E-05 |
|
|
|
Датчик движения ИК |
0,912624 |
||
|
|
Датчик движения УЗ |
|
||
|
2 |
Сервомотор |
15000 |
6,67E-05 |
0,557663 |
|
3 |
Управляющее устройство сервомотора |
60000 |
1,67E-05 |
0,864158 |
|
4 |
Электромотор |
15000 |
6,67E-05 |
0,557663 |
|
|
Электромотор №1 |
|
|
|
|
|
Электромотор №2 |
|
|
|
|
5 |
Управляющее устройство электромоторов |
60000 |
1,67E-05 |
0,864158 |
|
6 |
Главное управляющее устройство (контроллер) |
60000 |
1,67E-05 |
0,864158 |
|
7 |
Источник питания |
10000 |
1,00E-04 |
|
|
|
Источник питания моторов |
0,659464 |
||
|
|
Источник питания управляющих устройств |
|
||
|
8 |
Радиомодуль |
20000 |
5,00E-05 |
0,645326 |
Рассчитаем ВБР исходя из реальных рабочих периодов. Зададим продолжительность работы робота в течение одной зарядки -10ч. Далее установим срок эксплуатации робота в течение одной зарядки, не более двух часов в день, что составит одну неделю - 2*5=10. Тогда общее время работы устройства в год составит 10*52=520 часов, как показано в таблице рис.2.
Таблица 2
Расчет ВБР для работе 10 часов в неделю (520 часов вгод)
|
№ п.п. |
Название подсистемы |
MTBF |
λ |
ВБР элемента |
ВБР подсистемы |
|
1 |
Датчик движения ИК |
25000 |
4,00E-05 |
0,979414828 |
0,999576 |
|
Датчик движения УЗ |
25000 |
4,00E-05 |
|||
|
2 |
Сервомотор |
15000 |
6,67E-05 |
0,965927338 |
0,965927 |
|
3 |
Управляющее устройство сервомоторов |
60000 |
1,67E-05 |
0,991370781 |
0,991371 |
|
4 |
Электромотор (2 двигателя) |
15000 |
6,67E-05 |
0,965927338 |
0,998839 |
|
5 |
Главное управляющее устройство (контроллер) |
60000 |
1,67E-05 |
0,991370781 |
0,991371 |
|
6 |
Управляющее устройство электромоторов |
60000 |
1,67E-05 |
0,991370781 |
0,991371 |
|
7 |
Источник питания моторов |
10000 |
1,00E-04 |
0,949328867 |
0,997432 |
|
Источник питания управляющих устройств |
10000 |
1,00E-04 |
|||
|
8 |
Радиомодуль |
20000 |
5,00E-05 |
0,97433509 |
0,974335 |
Проведем расчет ВБР по формуле (1). Значение ВБР на конец года составит 0,913, при общей интенсивности отказов системы на конец года λ=1,75E-04.

Рис.2 График вероятности безотказной работы
На рис.2 сплошной линией показан график расчетного значения ВБР системы, пунктирной линией показан график аппроксимирующей на отрезке от 0 до 15000 часов функции. Далее рассчитаем оценку среднего времени функционирования системы, для этого проведем вычисления интенсивности отказа в пределах 100 тысяч часов. Построим графики интенсивности отказов системы и оценки времени безотказной работы, как показано на рис.2-4.

Рис.3 График среднего времени безотказной работы

Рис.4 График интенсивности отказов
Рассчитаем интеграл от расчётной функции ВБР. Как известно, математическое ожидание случайной величины (среднее время безотказной работы) рассчитывается по формуле, представленной ниже.
 (2)
(2)
Проинтегрировав выражение Тср по частям, получим следующее уравнение:
 (3)
(3)
Далее рассчитаем Тср по экспериментальным данным, используя формулу трапеций, представленную в формуле 3.
 (4)
(4)
Где: h-это
шаг;
 ;
;
 ;
;

Выполнив расчеты, получим, что среднее время безотказной работы системы Тср = 4250 часов, что составляет около шести месяцев непрерывной работы или восьми лет эксплуатации устройства. Рассчитаем значение асимптотического коэффициента готовности для стратегии обслуживания со встроенным контролем и ремонтом подсистемы в случае отказа по следующей формуле.
 (5)
(5)
Где
 – мат. ожидание времени безотказной
работы;
– мат. ожидание времени безотказной
работы;
 – мат. ожидание времени восстановления
системы.
– мат. ожидание времени восстановления
системы.
Установим случайное время восстановления системы в виде нормального распределения с мат. ожиданием 0,5 часа и среднеквадратическим отклонением в 10 минут. Небольшое время восстановления системы обусловлено постоянным контролем и наличием запасных элементов.
 (6)
(6)
Таким образом, асимптотический коэффициент готовности имеет достаточно высокое значение в виду быстрого восстановления системы. Коэффициент неасмимптотической готовности может быть рассчитан по формуле выведенной ранее:
 (7)
(7)
Далее рассмотрим структурную схему с
последовательной логикой работы датчиков
расстояния
Рис.6 Структурная схема с последовательной логикой работы датчиков расстояния.
Отличие схемы представленной на рис.6 от схемы представленной на рис.2 состоит в последовательной логике их функционирования и соответственно в более низком уровне надежности данной схемы. Запишем уравнение ВБР.
 2
2 2
2 2
2 (6)
(6)
Запишем показатели надежности в таблице № 3, в момент времени 520 часов, что составляет год эксплуатации системы.
Таблица 3
Расчет ВБР для работе 10 часов в неделю (520 часов в год)
|
|
|
MTBF |
λ |
Вбр |
ВБР |
|
1 |
Датчик движения ИК |
25000 |
4,00E-05 |
9,794148E-01 |
9,592534E-01 |
|
Датчик движения УЗ |
25000 |
4,00E-05 |
|||
|
2 |
Сервомотор |
15000 |
6,67E-05 |
9,659273E-01 |
9,659273E-01 |
|
3 |
Управляющее устройство сервомоторов |
60000 |
1,67E-05 |
9,913708E-01 |
9,913708E-01 |
|
4 |
Электромотор (2 двигателя) |
15000 |
6,67E-05 |
9,659273E-01 |
9,988391E-01 |
|
5 |
Главное управляющее устройство (контроллер) |
60000 |
1,67E-05 |
9,913708E-01 |
9,913708E-01 |
|
6 |
Управляющее устройство электромоторов |
60000 |
1,67E-05 |
9,913708E-01 |
9,913708E-01 |
|
7 |
Источник питания моторов |
10000 |
1,00E-04 |
9,493289E-01 |
9,974324E-01 |
|
Источник питания управляющих устройств |
10000 |
1,00E-04 |
|||
|
8 |
Радиомодуль |
20000 |
5,00E-05 |
9,743351E-01 |
9,743351E-01 |
Проведем расчеты, используя показатели надежности по формуле (6), используя показатели из таблицы № 3 варьируя время функционирования системы, получим следующий график вероятности безотказной работы (см.рис.7)

Рис.7 Графики вероятности безотказной работы
Толстой линией на рис.7 показан график данных полученных при расчете ВБР системы. Пунктирной линией представлен график аппроксимирующей функции на интервале от 0 до 14000 часов. Проинтегрируем экспериментальную функцию в пределах от 0 до 100000 часов. Получим следующее значение Тср=3337 часов, что составляет около четырех с половиной месяцев непрерывной работы или шести с половиной лет эксплуатации устройства. что Следует отметить, что расчетная оценка математического ожидания времени отказа соответствует интенсивности отказов λ=3E-04. Рассчитаем значение асимптотического коэффициента готовности для стратегии обслуживания со встроенным контролем и ремонтом подсистемы в случае отказа по формуле (3). Установим случайное время восстановления системы в виде нормального распределения параметрами представленными для предыдущей модели (мат. ожиданием 0,5 часа и среднеквадратическим отклонение 0,167 часа). Небольшое время восстановления системы, также как и раньше обусловлено постоянным контролем и наличием запасных элементов.
 (8)
(8)
Коэффициент готовности системы получился меньше чем в предыдущем варианте расчета (см. формулу (6)), так как часть элементов системы имеют последовательную, а не параллельную логику работы.