

Лекции / Лекция 14 Вращающие моменты АД
.pdfВращающие моменты асинхронных двигателей
Определение электромагнитного момента через электромаг-
нитные силы. Электромагнитный момент асинхронной машины создается в результате взаимодействия тока, протекающего по проводникам обмотки ротора, с вращающимся магнитным полем.
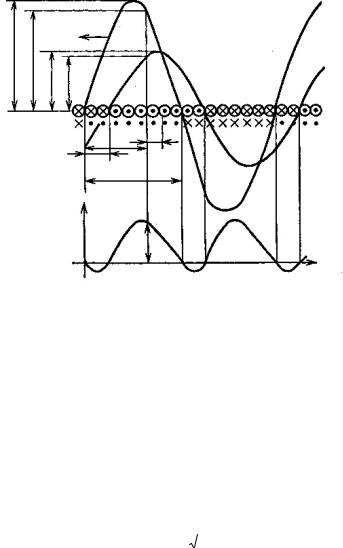
На рис. 2.28, а изображен развернутый в плоскость ротор с рас-
пределенной обмоткой в виде беличьей клетки, содержащей N2 проводников. Предположим, что в воздушном зазоре вдоль полюсного деления кривая распределения индукции магнитного поля B имеет
синусоидальную форму и перемещается относительно ротора справа налево. В результате этого в проводниках обмотки ротора индуцирует-
ся ЭДС e2 мгновенные значения которой будут пропорциональны
магнитной индукции в точке расположения проводника. Поэтому кривая распределения ЭДС в проводниках вдоль полюсного деления также будет синусоидальной и в другом масштабе будет повторять кривую индукции. Направление индуцированных ЭДС, определенное по правилу правой руки, показано на рис. 2.28, а крестиками и точками ниже проводников (заметим, что в данном случае магнитное поле перемещается относительно проводника, а не проводник относительно поля, как это требуется по правилу правой руки, поэтому при определении направления ЭДС большой палец следует направлять в сторону, противоположную движению поля).
|
|
|
|
|
B x |
v |
|
B |
|
|||
|
|
|
|
|
|
|
|
|||||
B m |
|
|
|
|
|
i2 x |
|
|
|
|||
|
|
I 2 m |
|
|
i2 |
|
||||||
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
i2 |
|
|
|
|
|
|
|
x |
dx |
|
e 2 |
||
|
|
|
|
|
|
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
a ) |
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x б ) |
|
Рис. 2.28. Образование вращающегося электромагнитного момента |
|||||||||||
|
|
в результате взаимодействия тока ротора с магнитным полем |
||||||||||
Так |
как ток |
в роторе I |
отстает от ЭДС E |
на угол |
||||||||
|
|
x2s |
|
|
|
2 |
2s |
2 |
||||
|
|
|
|
|
|
|
|
|||||
(tg 2 |
|
|
|
|
), которому на рис. 2.28, а соответствует пространствен- |
|||||||
r |
|
|
||||||||||
|
2 |
|
|
|
|
|
|
|
|
|
||
ная координата |
|
, то кривая распределения тока по проводникам |
||||||||||
|
||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
обмотки будет смещена относительно кривой ЭДС и индукции. Направление тока в проводниках показано внутри проводников.
Электромагнитная сила, действующая на проводник, находящийся в данный момент времени на расстоянии x от начала отсчета, будет равна:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
f |
|
B i |
l B |
sin |
|
x |
2I |
|
sin |
|
x |
l, |
|
|
|
|
|
||||||||||
|
x |
x 2x |
m |
|
|
|
|
2 |
|
2 |
|
||
где l– длина проводника в осевом направлении ротора;
i2,I2 – мгновенное и действующее значения токов в проводнике ро-
тора.
Распределение электромагнитных сил вдоль полюсных делений показано на рис. 2.28, б. На длине dx окружности ротора располагает-
|
|
|
|
|
|
N |
2 |
|
|
ся |
число |
проводников |
|
|
dx , а действующая на них |
сила |
|||
|
|
||||||||
|
|
|
|
|
|
D |
|
||
|
N |
2 |
|
df |
|
|
|
|
|
df |
fx |
|
dx . Сила |
создает электромагнитный момент, |
рав- |
||||
|
|
||||||||
|
D |
|
|
|
|
|
|||
D
ный df , где D – диаметр ротора.
2
Электромагнитный момент, создаваемый всеми проводниками ротора
M 2p D2df
0
2
Здесь 1 B l .
|
|
|
|
|
|
|
N |
2 |
|
|
|
D |
|
x |
x |
|
|
||
|
|
|
|
|
|
|
|
|
|||||||||||
2pB |
|
2I |
l |
|
|
|
|
|
|
sin |
|
sin |
|
|
dx |
||||
|
D 2 |
|
|
||||||||||||||||
|
|
|
2 |
|
|
|
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
Np |
|
I |
|
|
|
cos . |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
2 |
1 |
2 |
|
|
2 |
|
|
|
|
|
|||||||
При наличии на роторе фазной обмотки в числитель в качестве множителя вводится обмоточный коэффициент kоб2 kр2kу2
M = kоб2N2p 1I2 cos 2.
2 2
2
Произведение I2 cos 2 представляет собой активную состав-
ляющую тока ротора. Таким образом, электромагнитный момент асинхронной машины пропорционален магнитному потоку и активной составляющей тока ротора.
Полученные формулы поясняют физическую сущность образования электромагнитного момента и удобны для качественного анализа рабочего процесса асинхронной машины. Недостатком этих формул является то, что здесь момент является функцией трех величин, зависящих от нагрузки и скольжения: Ф , I2,cos 2 . Поэтому построение
механических характеристик по этим формулам вызывает определенные затруднения.
Определение электромагнитного момента через электромаг-
нитную мощность. Выражение для электромагнитного момента асинхронной машины может быть получено через передаваемую из статора в ротор электромагнитную мощность
Pэм m2E2I2 cos 2 Mср 1 Mср 2 f1 .
p
Отсюда
|
|
|
|
|
|
m E |
I |
2 |
cos |
pm2 |
2 mw2kср2 f1I2 cos 2 |
|
|||
|
M |
ср |
|
2 2 |
|
|
2 |
|
|
|
|
||||
|
|
|
|
|
|
|
2 f |
||||||||
|
|
|
|
|
2 f1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
p |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
1 |
|
m2pw2kоб2 mI2 cos 2 Cm mI2 cos 2 Cm mI2a . |
||||||||||||
|
|
|
|||||||||||||
|
2 |
||||||||||||||
Мощность, выделяемая на сопротивлении r2 в Т – образной
|
|
s |
|
схеме замещения, равна электромагнитной мощности |
|
||
2 r2 |
|
||
Pэм m1I2 |
|
. |
(2.23) |
s |
|||
Из Т – схемы замещения найдем приведенный ток ротора:
I2 |
|
|
|
|
U1 |
|
|
|
|
. |
(2.24) |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
r |
2 |
|
|
2 |
||||||
|
|
|
|
|
|
|
|
|||||
|
|
r |
c |
2 |
|
x c x |
|
|
||||
s |
|
|||||||||||
|
|
1 |
1 |
|
1 |
1 |
2 |
|
|
|
|
|
Поделив (2.23) на угловую скорость поля |
и заменив ток I |
|||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
|
2 |
его значением из (2.24), получим аналитическое выражение механической характеристики асинхронной машины

|
m1U12r2 / s |
|
M |
1 r1 c1r2 / s 2 x1 c1x2 2 |
(2.25) |
Если принять, что параметры машины являются постоянными,
то момент при U1 const является функцией только скольжения s . Поэтому эта формула удобна для построения механической характери-
стики машины M f s . Выясним характер изменения этой зависимости. При малых значениях скольжения в квадратных скобках знаме-
|
|
|
|
c r 2 |
|||
нателя (2.25) можно пренебречь всеми слагаемыми, кроме |
|
1 |
. |
||||
s |
|||||||
Тогда получим |
|
|
|
|
|||
|
|
|
|
|
|||
|
mU |
2 |
|
|
|
|
|
M |
1 |
1 |
s, |
|
|
|
|
|
|
|
|
|
|||
|
c2r |
|
|
|
|||
1 1 |
2 |
|
|
|
|
||
т.е. при малых s электромагнитный момент изменяется пропорцио-
нально скольжению и зависимость M f s имеет линейный харак-
тер.
При скольжениях, близких или больших единицы, можно пре-
|
|
|
|
|
|
|
|
r |
|
небречь активными сопротивлениями обмоток r и |
2 |
по сравнению с |
|||||||
|
|||||||||
|
|
|
|
|
1 |
s |
|||
их индуктивными сопротивлениями x1 |
и x2 . Тогда можно записать |
||||||||
M |
|
m1U12r2 |
|
1 |
, |
|
|
||
x c x 2 |
|
s |
|
|
|||||
1 |
1 |
1 |
2 |
|
|
|
|
|
|
откуда следует, что при больших s момент обратно пропорционален скольжению и кривая M f s имеет вид гиперболы.
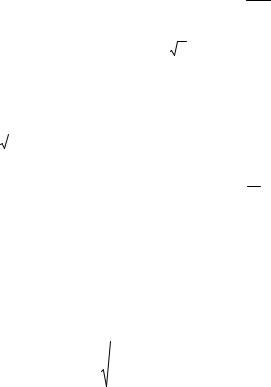
На основании изложенного кривая M f s при U1 const
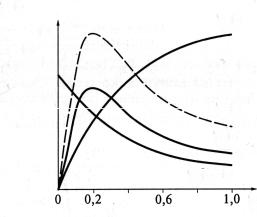
имеет характер, изображенный на рис. 2.29. Физически такой сложный вид этой характеристики объясняется аналогичным характером изменения активной составляющей тока ротора. С увеличением момента нагрузки, начиная с точки холостого хода, скольжение будет расти.
Рис. 2.29. Механическая характеристика асинхронной машины
При этом будут возрастать ток ротора Ι'2 и его фазовый угол
2 , а cos 2 будет уменьшаться. Причем ток ротора будет становить-
ся все более индуктивным, а его активная составляющая сначала будет увеличиваться, а затем начнет уменьшаться (рис. 2.30) несмотря на
рост общего тока Ι'2 .
Ранее было показано, что электромагнитный момент пропорционален произведению рабочего потока Ф и активной составляющей
тока ротора Ι'2а ,:
M cмФΙ2' cos 2 cмФΙ2' а ,
(2.26)
где cм - коэффициент мо-
2
I2
E2
Рис. 2.30. Векторная диаграмма тока ротора асинхронного двигателя при
мента.
Построив вместе эти зависимости (рис. 2.31), убедимся, что приconst характер кривой M f (s) определяется гра-
фиком Ι'2a(s).
Зависимость M f s на рис. 2.29 построена для трёх возможных
режимов работы асинхронной машины. В области скольжений от 0 до 1 характеристика соответствует двигательному режиму работы ( 2 1 ), в области скольжений от 1 до + – режиму электромаг-
нитного тормоза (ротор вращается в сторону, противоположную вращению поля) и в области от 0 до – – генераторному режиму.
|
|
Согласно |
выра- |
||
M |
|
жения |
(2.25) |
электро- |
|
|
магнитный момент при |
||||
I2 |
|
||||
I2a |
|
любом значении сколь- |
|||
cos 2 |
M |
жения пропорционален |
|||
|
I2a |
||||
|
квадрату приложенного |
||||
|
cos 2 |
||||
|
напряжения U1 .На ме- |
||||
|
S |
||||
|
|
ханической |
характери- |
||
|
|
стике рис. 2.29 показа- |
|||
|
|
ны три |
наиболее важ- |
||
|
Рис. 2.31. Пояснение формы механической |
ные точки двигательно- |
|||
|
характеристики асинхронного двигателя |
||||
|
|
го режима. |
Нормальная |
||
работа двигателя обычно протекает на прямолинейной части характе-
ристики. Нормальная работа двигателя обычно протекает на прямоли-
нейной части характеристики. Здесь располагается точка, соответст-
вующая номинальному моменту Mн . Скольжение при этом моменте sн 0,015 0,05.
Перегрузочная способность двигателя оценивается по макси-
мальному моменту Мт . Скольжение, соответствующее этому момен-
ту, называется критическим и обычно sm 0,07 0,15. Часто Mm
выражают в долях Mн . Кратность максимального момента для асин-
хронных двигателей Kп |
Mm |
1,7 3 |
. Более высокие значения |
Kп |
|
Mн |
|||||
|
|
|
|
соответствуют двигателям с меньшим числом полюсов.
Момент при скольжении s 1 называется начальным пусковым моментом Mп . Он является важной величиной для оценки пусковых свойств двигателя. Момент Mп также выражается в долях Mн . Для асинхронных двигателей общего назначения кратность начального
пускового момента Kп Mm 1 1.35 .
Mн
Максимальный электромагнитный момент. Выражение для электромагнитного момента (2.25) верно в общем случае, т.е. также
тогда, когда параметры r1,x1,r2,x2 не постоянны и зависят от вели-
чин токов и скольжения. В этом случае при каждом значении s в выражение (2.25) нужно подставлять соответствующие значения указанных параметров. Ограничимся здесь рассмотрением машины с посто-
янными параметрами и исследуем зависимость M f s по формуле
(2.25) при U1 const и f1 const на максимум и минимум.
Вместо s удобнее рассматривать переменную величину y 1 и s
тогда соотношение (2.25) можно представить в виде
M |
Ay |
, |
(2.27) |
B Cy Dy2 |
где
A pm1U12r2 ; C 2r1r2 ,
1
B r2 |
x |
c x |
2 , |
D c2r 2. |
(2.28) |
||
1 |
1 |
1 |
2 |
|
1 |
2 |
|
Взяв от (2.27) производную по y и приравняв ее нулю, получим уравнение для определения значений y ym , при которых M имеет экстремумы:
dM |
|
A B Dym2 |
|
|||
|
|
|
|
|
0. |
(2.29) |
|
|
|||||
|
dy y ym |
|
B CymDym2 |
|
||

Уравнение (2.29) удовлетворяется в случае, когда его числитель равен нулю. Тогда
y |
B |
|
|
или s |
|
|
D |
, |
|
(2.30) |
||||||||||
m |
|
|
D |
|
m |
|
|
|
|
|
|
B |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
что с учетом равенств (2.28) дает |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
sm |
|
|
|
c1r2 |
|
|
|
|
|
|
|
. |
|
|
(2.31) |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
r12 x1 x2 2 |
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Скольжение sm называется критическим. |
|
|
|
|
|
|
||||||||||||||
Максимальные значения |
момента |
|
получим |
при подстановке |
||||||||||||||||
y ym из (2.30) в (2.25): |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Mm |
|
A |
|
|
|
|
. |
|
|
|
|
(2.32) |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
C 2 |
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
BD |
|
|
|
|
|
|
|
|
|||||
или при подстановке значений A ,B ,C ,D из (2.28) в (2.32): |
||||||||||||||||||||
|
|
|
|
|
|
|
pmU |
2 |
|
|
|
|
|
|
|
|||||
Mm |
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
(2.33) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
r2 |
|
|
x cx |
|
||||||||||||
|
|
|
2 c r |
|
|
|
|
|||||||||||||
|
|
|
|
|
1 1 1 |
|
1 |
|
|
|
1 |
2 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В этих соотношениях знаки плюс относятся к двигательному, а знаки минус – к генераторному режиму работы.
Для нормальных асинхронных машин члены c1r1 в выражениях (2.31) и (2.33) малы по сравнению с остальными. Полагая поэтому r1 0, имеем
s |
|
c1r2 |
|
; |
(2.34) |
|
|
|
|
||||
m |
x |
|
cx |
|
||
|
1 |
|
2 |
|
|
|
|
pmU2 |
|
|
|
||
Mm |
|
1 |
1 |
|
. |
(2.35) |
2 c x |
x |
|
||||
|
1 1 |
1 |
2 |
|
|
|
Полученные соотношения позволяют сделать вывод, что величина максимального момента, во–первых, не зависит, согласно выражениям (2.33) и (2.35), от величины активного сопротивления вторичной цепи, во–вторых, пропорциональна квадрату напряжения, в– третьих, с большой точностью обратно пропорциональна индуктивным сопротивлениям рассеяния и, в–четвертых, в генераторном режи-
ме несколько больше, чем в двигательном. Так как U1 f1 1 , то из
выражения (2.35) можно сделать также вывод, что максимальный момент пропорционален квадрату магнитного потока машины. Весьма
важно подчеркнуть, что, хотя момент Mm не зависит от вторичного активного сопротивления, величина скольжения sm , при котором на-
блюдается этот момент, согласно выражениям (2.31) и (2.34), пропорциональна этому сопротивлению.
У асинхронных двигателей нормального исполнения кратность максимального момента при номинальном напряжении
пMm 1,7 3,0
Mн
иsm 0,06 0,15. Более высокие Kп имеют двигатели с малым
числом полюсов.
M |
|
|
|
|
|
|
|
|
|
|
|
2 |
3 |
|
|
|
6 |
1 |
|
|
|
|
|
|
5 |
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
Sm1 |
Sm2 Sm3 |
|
Sm4 |
Sm5 |
Sm6 |
S |
|
0 |
0,2 |
0,4 |
0,6 |
0,8 |
1,0 |
1,2 |
1,4 |
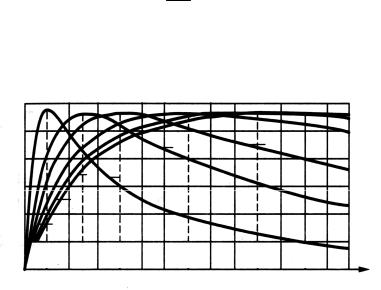
Рис. 2.32. Кривыеэлектромагнитногомоментаасинхронной машины приразличныхзначенияхактивногосопротивления вторичной цепи