

1 Построение кинематической схемы механизма
При расчёте будем руководствоваться следующими допущениями:
а) усилия, создаваемые тяговыми канатами, компенсируются уравновешивающими цепями;
б) в начале рабочего цикла груз находится на нижнем уровне;
в) во время движения груз проходит максимальный путь.
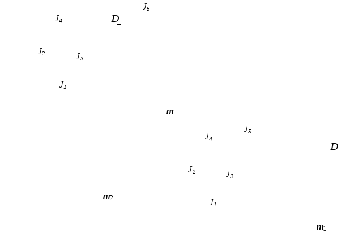
На рис. 1 приведены кинематические схемы механизмов, в исходном состоянии.
а) б)
Рис.1 Кинематическая схема электропривода: а – с уравновешенной лебедкой; б – с неуравновешенной лебедкой
2 Расчет статических моментов и сил
2.1 Статические моменты при движении с грузом
Сила тяжести со стороны груза
 , (1)
, (1)
где m1 – масса грузозахвата, кг;
m0 – масса полезного груза (грузоподъемность), кг;
g – ускорение свободного падения, g = 9,81 м/с2.
Сила тяжести со стороны противовеса
 , (2)
, (2)
где m2 – масса противовеса, кг.
Статический момент на барабане
 . (3)
. (3)
Статический момент на промежуточном валу зубчатой передачи
 (4)
(4)
где i1 – передаточное число первой ступени редуктора.
Статический момент на валу двигателя
 (5)
(5)
где i2 – передаточное число второй ступени редуктора.
2.2 Статические моменты при движении без груза
Сила тяжести со стороны груза
 , (6)
, (6)
Сила тяжести со стороны противовеса
 , (7)
, (7)
Статический момент на барабане
 . (8)
. (8)
Статический момент на промежуточном валу зубчатой передачи
 . (9)
. (9)
Статический момент на валу двигателя
 . (10)
. (10)
Направление всех рассчитанных статических моментов и сил необходимо указать на кинематической схеме механизма (рис. 1).
3 Расчет приведенных статических моментов
Приведенный момент действующий на валу двигателя определяется из закона сохранения мощности
 , (11)
, (11)
следовательно
 . (12)
. (12)
Чтобы привести к валу двигателя статические моменты, действующие в электроприводе, не нужно знать тип передачи и количество ступеней передачи, а достаточно знать отношение скоростей на входе в привод и на его выходе – скорость вращения барабана.
Исходя
из формул передаточных чисел редуктора,
 и
и
 определяем отношение
определяем отношение
 . (13)
. (13)
Приведенный статический момент, действующий на валу двигателя, при движении с грузом
 . (14)
. (14)
Приведенный статический момент, действующий на валу двигателя, при движении без груза
 . (15)
. (15)
4 Предварительный выбор электродвигателя
Угловая частота вращения барабана (шкива)
 , (16)
, (16)
где V – скорость подъема груза, м/с2;
D – диаметр барабана (шкива), м.
Угловая частота вращения промежуточного вала зубчатой передачи
 , (17)
, (17)
Угловая частота вращения двигателя
 , (18)
, (18)
Скорость вращения двигателя
 . (19)
. (19)
Предварительно определяем требуемую мощность двигателя
 , (20)
, (20)
где kз –коэффициент запаса, принимаем kз =1,3.
Обоснование выбора электродвигателя.
Асинхронный электродвигатель нашёл широкое применение в промышленности благодаря простоте в обслуживании и эксплуатации, низкой стоимости, высокой надёжности и простой конструкции. Однако у таких моделей есть и недостатки: они отличаются малым пусковым моментом и большим пусковым током, плохо переносят изменения параметров сети. Для регулирования скорости необходимо использовать современные преобразователи. В промышленности асинхронные электродвигатели используются с целью привода механизмов, не предъявляющих особые требования к показателям качества электроэнергии, пусковым показателям, скольжению.
По справочным данным [3, 4] предварительно выбираем асинхронный электродвигатель с короткозамкнутым ротором марки 4А112МА6УЗ .
Номинальные параметры приведены в таблице 1.
Таблица 1. Номинальные параметры электродвигателя
|
Наименование параметра |
Условное обозначение |
Значение параметра |
|
Мощность |
РН, кВт |
3 |
|
Синхронная скорость |
n0, об/мин |
1000 |
|
Число пар полюсов |
рП |
3 |
|
Номинальное скольжение |
sН, % |
4,7 |
|
Критическое скольжение |
sК, % |
37 |
|
Коэффициент мощности |
cos φН |
0,76 |
|
Коэффициент полезного действия |
ηН, % |
81 |
|
Момент инерции ротора |
JДВ, кг∙м2 |
0,017 |
|
Кратность пускового момента |
mП |
2 |
|
Кратность критического момента |
mК |
2,5 |
|
Активное сопротивление обмотки статора |
|
0,085 |
|
Индуктивное сопротивление обмотки статора |
|
0,074 |
|
Активное сопротивление приведенной обмотки ротора |
|
0,063 |
|
Индуктивное сопротивление приведенной обмотки ротора |
|
0,1 |
 ,
о.е.
,
о.е. ,
о.е.
,
о.е. ,
о.е.
,
о.е. ,
о.е.
,
о.е.