

методички / 4037
.pdf4037 |
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ |
|
|
|
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА |
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ
«САМАРСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ПУТЕЙ СООБЩЕНИЯ»
Кафедра «Путь и строительство железных дорог»
ДИНАМИКА ТРАНСПОРТНЫХ СООРУЖЕНИЙ
Методические указания к выполнению практических и лабораторной работ для студентов специальности 23.05.06 «Строительство
железных дорог, мостов и транспортных тоннелей» очной и заочной форм обучения
Составитель: С.А. Галанский Г.Р. Маеров
Самара
2016
1
УДК 625.002
Динамика транспортных сооружений : методические указания к выполнению практических и лабораторной работ для студентов специальности 23.05.06 «Строительство железных дорог, мостов и транспортных тоннелей» очной и заочной форм обучения / составители : С.А. Галанский, Г.Р. Маеров. – Самара : СамГУПС, 2016. – 48 с.
Приведены методические указания к выполнению практических и лабораторных работ по дисциплине «Динамика транспортных сооружений» для студентов очной и заочной формы обучения специальности 23.05.06 «Строительство железных дорог, мостов и транспортных тоннелей».
Методические указания содержат основные положения по динамическим воздействиям на транспортные сооружения, определению реакций сооружений на динамическое воздействие, методики измерений и оценки устойчивости сооружений при различных динамических воздействиях.
Утверждены на заседании кафедры ПСЖД 29.10.2015 г., протокол № 2 . Печатаются по решению редакционно-издательского совета университета.
Составители: Сергей Анатольевич Галанский Георгий Романович Маеров
Рецензенты: д.т.н., профессор кафедры «ПСЖД» СамГУПСа В.Г. Рахчеев; к.т.н., доцент кафедры «СДМ и ТМ» СамГУПСа В.А. Кожевников
Под редакцией составителей
Подписано в печать 07.06.2016. Формат 60х90 1/16. Усл. печ. л. 3,0. Тираж 50 экз. Заказ 106.
© Самарский государственный университет путей сообщения, 2016
2
ВВЕДЕНИЕ
Динамика сооружений – это раздел строительной механики, посвященный методам расчета сооружений на динамические воздействия.
Впроцессе эксплуатации сооружения подвергаются различного вида динамическим воздействиям: сейсмические толчки; ветровые порывы; поезда и автомобили, движущиеся по мостам; динамические воздействия от технологических машин, станков, компрессоров, турбин, установленных на перекрытиях и фундаментах промышленных зданий. Динамической нагрузкой называется такая нагрузка, которая изменяет свое значение или положение во времени, сообщает массам сооружения ускорения и вызывает тем самым силы инерции.
При действии динамической нагрузки в сооружении возникают механические колебания, в элементах сооружения возникают переменные во времени напряжения и деформации. Расчет сооружений с учетом сил инерции и колебаний называется динамическим расчетом. Динамический расчет более сложен и трудоемок, чем статический.
Вопределенных условиях при периодическом повторении малых динамических воздействий происходит накопление энергии системы, которое выражается в постоянном увеличении размаха (амплитуды) колебаний и сил инерции до очень больших значений. Такие условия создаются при совпадении частоты изменения нагрузки и частоты собственных колебаний системы. Состояние системы, при котором частота возмущающей силы совпадает или очень близка к частоте собственных колебаний системы, в результате чего происходит возрастание амплитуды колебаний, называется резонансом. Резонанс опасен для сооружений тем, что может произойти при малых динамических воздействиях, может привести к разрушению конструкций, достаточно прочных по отношению к статическим нагрузкам.
Частоты собственных колебаний необходимо знать для того, чтобы сравнить их с частотой вынужденных колебаний и исключить возможность возникновения резонанса. Максимальные силы инерции необходимо учитывать при расчете сооружений на прочность, жесткость, устойчивость и выносливость.
Задача инженера – уметь управлять колебаниями, возникающими в конструкциях или сооружениях.
Материал, приведенный в данных методических указаниях, соответствует компетенции ПК-32 федерального государственного образовательного стандарта высшего профессионального образования, и будет способствовать лучшей подготовке студентов к практическим работам №№ 1–8 и лабораторной работе № 1.
Врезультате освоения дисциплины обучающийся должен
знать: основные методы решения динамических задач строительной механики и соответствующих нормативных документов, основных принципов проектирования
3
конструкций зданий и сооружений в сейсмоопасных регионах или конструкций, подвергаемых динамическим воздействиям;
уметь: составить расчетную схему для сложных инженерных конструкций и их элементов при выполнении динамических расчетов, вести расчеты строительных конструкций на динамические воздействия и устойчивость, анализировать и оценивать получаемые на ЭВМ результаты динамических расчетов;
владеть: навыками использования практических приемов и методов расчета сооружений на динамические воздействия и устойчивость, в том числе и с помощью современных программных комплексов.
Практическая работа № 1
СВОБОДНЫЕ И ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ СИСТЕМ
СОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
1.Свободные колебания консервативных систем с одной степенью свободы
Рассмотрим систему с одной степенью свободы в виде невесомой балки с сосредоточенной массой m. Если систему вывести из состояния равновесия, то она будет совершать свободные колебания.
Для составления уравнения движения массы используем принцип Даламбера. В любой момент времени на массу действует сила упругости системы и силы инерции. Силы сопротивления среды, которые приводят к затуханию свободных колебаний, в данном случае не учитывается.
Сила упругости системы S, которая пропорциональна отклонению массы от положения равновесия, определяется выражением
S = r11 ∙ = |
1 |
∙ , |
(1) |
|
|||
|
11 |
|
|
где r11 – жесткость системы; 11 − податливость системы; ν=ν(t) – отклонение массы от положения статического равновесия.
Жесткость системы r11 представляет силу, которую необходимо приложить в точке прикрепления массы, чтобы вызвать единичное перемещение этой точки. Податливость системы 11 – величина, обратная жесткости, и представляет перемещение точки, вызванное единичной силой.
Сила инерции J направлена в сторону, противоположную ускорению, и определяется выражением:
J = –m∙ |
2 |
= − ∙ ̈. |
(2) |
2 |
|||
|
4 |
|
|
Масса в процессе свободных колебаний будет находиться в равновесии под
действием силы упругости и силы инерции: |
|
|
|
||
S – J = 0. |
(3) |
||||
Сделав подстановку величин, получим |
|
|
|
||
r11ν+m∙ ̈= 0 |
|
||||
или |
|
|
|
||
̈+ 2 ∙ = 0, |
(4) |
||||
где |
|
|
|
||
2 = |
11 |
= |
1 |
. |
(5) |
|
|
||||
|
|
∙ 11 |
|
||
Интегралом дифференциального уравнения (4) свободных колебаний является |
|||||
функция |
|
|
|
||
= С1 ∙ sin + С2 ∙ cos . |
(6) |
||||
Постоянные С1 и С2, входящие в уравнение (6), определяются при начальных условиях t=0, ν= 0, ̇= 0̇и равны
̇ С2 = 0 ; С1 = 0.
Теперь уравнение (6) запишется в виде
̇
= 0 ∙ sin + 0 ∙ cos .
Если в начальный момент времени 0 = 0, то уравнение (7) принимает вид
̇
= 0 ∙ sin .
(7)
(8)
Уравнение (6) можно представить в другом виде. Для этого выразим С1 и С2 через новые постоянные следующим образом:
С1= ∙ 0; С2 = ∙ 0.
Тогда уравнение свободных гармонических колебаний системы с одной степенью свободы запишется в виде
|
|
|
|
|
|
|
ν= ∙ ( + 0), |
|
|
|
|
|
|
|
|
|
|
(9) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
∙ |
|
|
|
∙ |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
где А =√С2 |
+ С2 |
= √ 2 |
|
̇ |
|
|
|
|
|
|
|||||||||
+ |
0 |
амплитуда колебаний, tq |
= |
2 |
= |
0 |
|
|
, |
= ( |
0 |
|
) – |
||||||
2 |
|
|
̇ |
|
̇ |
||||||||||||||
1 |
2 |
0 |
|
0 |
|
|
0 |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
0 |
|
|
0 |
|
||||
начальная фаза колебаний.
5

Из графика видно, что величина ν меняет знак и в определенные моменты достигает наибольших отклонений (амплитуд). Время Т, за которое масса совершает один полный цикл, называется периодом колебаний.
Величина, обратная периоду колебаний, определяет число циклов колебаний в единицу времени и называется частотой. Частоту р, равную числу циклов колебаний в 2 секунд, называют круговой частотой колебаний и определяют по формуле:
р=√ |
11 |
= √ |
1 |
= √ |
|
, |
(10) |
|
∙ |
|
|||||
11 |
|
ст |
|
||||
где ст – перемещение точки при статическом приложении силы P=mg. Единицей измерения круговой частоты р служит рад/с, которую часто записывают с–1. Число циклов колебаний за одну секунду называют технической частотой с единицей измерения Герц
(Гц).
Сила инерции в произвольный момент времени определяется выражением
J(t)=– m∙ ̈= 2 ∙ ∙ ∙ ( + |
) = 2 ∙ ∙ ( ) . |
(11) |
0 |
|
|
При гармонических колебаниях сила инерции пропорциональна отклонению массы и достигает своего максимального (амплитудного) значения
Jmax= 2 ∙ ∙ |
(12) |
при ( ) = max.
Свободные колебания характеризуются непрерывным переходом кинетической энергии движения массы в потенциальную энергию деформации системы и наоборот.
Задание на данную работу выдает преподаватель в виде схемы динамической системы с одной степенью свободы и значений необходимых параметров. В задании необходимо определить функцию перемещений, амплитуду и частоту свободных колебаний системы.
2. Вынужденные колебания системы с одной степенью свободы
Рассмотрим вынужденные колебания упругой системы с одной степенью свободы на действие возмущающей нагрузки P(t)=δ(t), где δ(t) – обобщенная функция Дирака: δ(t)=0
при t≠ 0, ∫−∞∞ ( ) = 1.
Теперь уравнение движения консервативной системы представляется так: |
|
m∙ ̈+ r11ν= δ(t) . |
(13) |
6

Уравнение движения диссипативной системы, подчиняющейся скорректированной модели Фохта, имеет вид
m∙ ̈+ √ |
|
∙ + r11ν= δ(t). |
(14) |
∙ 11 |
Нагрузка δ(t) есть математическая запись воздействия единичного импульса на систему в момент времени t=0. Запишем закон сохранения импульса в момент времени
t=0: m∙ ̈=∫00+− ( ) ∙ = 1. При t >0 уравнения (13), (14) имеют вид:
|
|
|
|
|
̈+ 2 ∙ = 0, |
|
|
|
|
|
|
(15) |
|||||
|
|
|
|
|
̈+ ∙ ̇2 ∙ = 0 . |
|
|
(16) |
|||||||||
с начальными условиями: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t=0, ν= |
|
|
= 0, ν̇= ̇= |
1 |
. |
|
|
|
(17) |
|||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
0 |
0 |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решение уравнения (15) с начальными условиями (17) получим из (8): |
|
||||||||||||||||
|
|
|
|
( ) = |
|
1 |
∙ sin( ∙ ) . |
|
|
(18) |
|||||||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Решение уравнения (16) с теми же начальными условиями получим с учетом (17): |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) = |
1 |
|
∙ exp(− |
|
) ∙ sin( ), |
= √1 − |
2 |
. |
(19) |
||||||||
|
|
|
|
||||||||||||||
|
1 |
|
|
2 |
|
1 |
|
1 |
|
4 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для реальных материалов γ≤ 0,1 и 1 = , так что с большой точностью можно |
|||||||||||||||||
считать |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) = |
|
1 |
∙ exp(− |
|
) ∙ sin( ∙ ) . |
|
|
(20) |
|||||||||
|
|
2 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Формулы (18)–(20) называются импульсной переходной функцией (ИПФ) и обозначаются символом k(t). Таким образом, для консервативной системы с одной
степенью свободы |
|
|
|
|
k(t)= |
1 |
∙ sin( ∙ ) ; |
(21) |
|
|
||||
|
|
|
для диссипативной системы, отвечающей скорректированной модели Фохта,
|
1 |
|
|
|
|
|
|
|
|
= √1 − |
2 |
|
||
k(t)= |
|
|
∙ exp(− |
|
|
) ∙ sin( ), |
|
|
, |
(22) |
||||
|
|
|
|
|
||||||||||
|
1 |
|
2 |
|
|
1 |
1 |
|
4 |
|
|
|||
|
|
|
|
|
|
|
|
|
||||||
или для γ≤ 0,1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
( ) = |
1 |
|
|
∙ exp(− |
|
) ∙ sin( ∙ ) |
|
|
(23) |
|||
|
|
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
7 |
|
|
|
|
|
|
|

Зная ИПФ системы, результат ее расчета на любое воздействие P=P(t) можно записать
в виде свертки (интеграл Дюамеля): |
|
|
( ) = ∫ |
( − ) ∙ ( ) ∙ . |
(24) |
−∞ |
|
|
Перемещение от действия на систему единичного импульса в момент времени τ равно ( − ), t≥τ, от действия импульса величина которого ( ) ∙ , перемещение системы равно ( − ) ∙ ( ) ∙ . Остается просуммировать элементарные перемещения при действии нагрузки во время τ≥ −∞ до τ= ∞, учитывая, что ( ) = 0 при t <0. В результате получается формула (24).
Задание на данную работу выдает преподаватель в виде схемы динамической системы с одной степенью свободы при приложении импульсивной нагрузки с учетом диссипативности и значений необходимых параметров. В задании необходимо определить функцию перемещений, амплитуду и частоту свободных колебаний системы, построить график зависимости перемещений от времени.
Практическая работа № 2
СОСТАВЛЕНИЕ ДИНАМИЧЕСКИХ РАСЧЕТНЫХ СХЕМ. ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ЖЕСТКОСТИ, ПОДАТЛИВОСТИ, ДЕМПФИРОВАНИЯ
Расчет динамического коэффициента при ударной нагрузке
Предположим, что очень жесткое тело А весом Q, деформацией которого можно пренебречь, падая с некоторой высоты H, ударяет по другому телу B, опирающемуся на упругую систему С (рис. 1). В частном случае это может быть падение груза на конец призматического стержня, другой конец которого закреплен (продольный удар), падение груза на балку, лежащую на опорах (изгибающий удар), и т. п.
В течение очень короткого промежутка времени упругая система испытает некоторую деформацию. Обозначим δд через перемещение тела В (местной деформацией которого пренебрежем) в направлении удара. В упомянутых частных случаях при продольном ударе за перемещение δд соответственно нужно считать продольную деформацию стержня lд, при изгибающем ударе – прогиб балки fд в ударяемом сечении и т. п. В результате удара в системе С возникнут напряжения Рд (σд или τд – в зависимости от вида деформации, рис. 1).
Полагая, что кинетическая энергия Т ударяющего тела полностью переходит в потенциальную энергию Uд
деформации упругой системы, можем написать:
Т= Uд . |
(1) |
8

Таким образом, выражение для энергии:
Uc= |
1 |
|
= |
|
|
2 . |
(2) |
|
2 |
||||||
2 |
|
|
|
|
|||
Реакция системы С на действие упавшего груза Q (назовем ее Pд) является следствием развития деформации δд; она растет параллельно δд от нуля до окончательной, максимальной величины и, если напряжения Рд не превосходят предела пропорциональности материала, связана с ней законом Гука:
Рд
δд= с , (3)
где с – коэффициент пропорциональности, сохраняющий свое значение и при ударе. Таким образом, обе предпосылки для правильности формулы (27) принимаются и
при ударе:
|
|
|
δд = δ ± √δд + 2 δ |
(4) |
|
или, удерживая перед радикалом для определения наибольшей величины деформации системы в направлении удара знак плюс, получаем:
δ |
= δ (1 + √1 + |
2 |
) . |
(5) |
|
||||
д |
|
δ |
|
|
|
|
|
||
Так как напряжения и усилия по закону Гука пропорциональны деформации, то
P = P (1 + √1 + |
2 |
) = ; |
(6) |
||||
|
|||||||
д |
|
|
|
|
д |
|
|
|
|
δ |
|
|
|||
P = (1 + √1 + |
2 |
|
) = . |
(7) |
|||
|
|||||||
д |
|
|
|
|
д |
|
|
|
|
|
δ |
|
|||
Из этих формул видно, что величина динамических деформаций, напряжений и усилий зависит от величины статической деформации, т.е. от жесткости и продольных размеров ударяемого тела; ниже это дополнительно будет показано на отдельных примерах. Величина
Kд = 1 + √1 + |
2 |
, |
(8) |
|
δ |
||||
|
|
|
в данном случае представляет собой динамический коэффициент.
9
В случае внезапного приложения груза, когда H = 0 получаем Kд = 2.
Формула (8) используется в случаях, когда масса упругого тела, испытывающего удар, мала, и ею в расчете пренебрегают.
При необходимости учета массы тела, испытывающего удар, формула для расчета динамического коэффициента принимает вид:
2
Kд = 1 + √1 + δ (1+ пр) , (9)
г
где mг – масса падающего груза, mпр – приведенная масса тела, испытывающего удар, причем
mпр =αm, |
(10) |
где m – истинная (распределенная) масса тела; α – коэффициент приведения распределенной массы к точечной. Он определяется путем сравнения кинетической энергии тела с распределенной и с точечной массами. Коэффициент α зависит от вида удара (продольный, изгибный и т.п.) и от характера закрепления концов стержня.
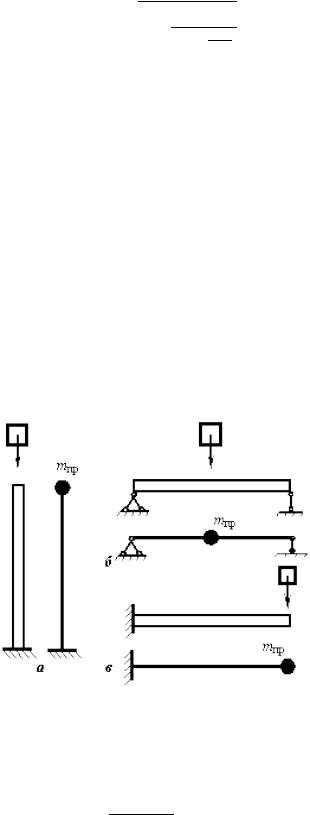
Так, для консольной балки, испытывающей продольный удар (рис. 2, а), α = 0,33; для шарнирно опертой балки на двух опорах, испытывающей удар посередине (рис. 2, б), α = 17/35≈0,5; для консольной балки, испытывающей изгибный удар
(рис. 2, в), α = 33/140≈0,235 и т.д.
Рис. 2. Схема к расчету балки на продольный удар
Заменяя в этой формуле Н на /2 , где V – скорость ударяющего тела в начальный момент удара, получаем:
Kд = 1 + √1 + |
2 |
(11) |
|
|
. |
||
|
|||
|
|
|
|
10 |
|
|
|