

Ответы на зачет
.docxВекторные величины. Обозначение. Численные значения, модуль и орт вектора.
Если величина, кроме числового значения характеризуется еще и направлением, то она называется векторной величиной или просто вектором. На рисунках и схемах вектор отображается отрезком прямой со стрелкой на одном конце. Длина отрезка в выбранном масштабе выражает числовое значение векторной величины (его модуль), а стрелка указывает ее направление.
Численное значение вектора А называется модулем или длиной и обозначается A или |A|.
Единичный вектор, или орт, — вектор нормированного пространства, длина которого равна единице. Единичные вектора используются, в частности, для задания направлений в пространстве.
2) Суммирование векторов.
Чтобы сложить два вектора, нужно от конца одного из них отложить второй вектор; тогда сумма – это вектор с началом в начале первого вектора и концом в конце второго вектора: это правило называется правилом треугольника.
Если векторы неколлинеарны, то можно воспользоваться правилом параллелограмма: отложить векторы от одной точки и достроить полученные два отрезка AB и AC до параллелограмма ABDC; тогда вектор, идущий по диагонали параллелограмма равен сумме данных векторов.
3) Способы задания положения точки в пространстве.
Положение точки в пространстве можно задать двумя способами: координатным и векторным.
При задании движения координатным способом с телом отсчета связывают какую-либо систему координат, например, декартову. Движение точки будет задано, когда координаты будут известны, как функции времени.
Векторный способ: Точка задается радиус-вектором, если известны его длина (модуль) и направление в пространстве, другими словами – значения его проекций rx, ry, rz на оси координат OX, OY и OZ, или углы между радиус-вектором и осями координат.
4) Скорость точки.
Скоростью точки называют кинематическую меру ее движения, равную производной по времени от радиус-вектора этой точки в рассматриваемой системе отсчета.
5) Обозначения производных по времени.
Производные по времени обозначаются точкой сверху
• •• •
Φ = ω Φ = ω = ε
Φ- угол, ω - угловая скорость, ε- угловое ускорение
6) Проекции скорости точки на координатные оси.
Ориентацию вектора скорости V в системе отсчёта OXYZ определяют по направляющим косинусам.
7) Модуль вектора скорости.
|v|=√(vx²+vy²+vz²)
8) Ускорение точки.
меру изменения ее скорости, равную производной по времени от скорости этой точки или второй производной от радиус-вектора точки по времени.
9) Скорость и ускорение точки, движущейся по прямой. Равномерное и неравномерное движение. Укажите размерность скорости точки и ускорения.
Скорость материальной точки представляет собой вектор, характеризующий направление и быстроту перемещения материальной точки относительно тела отсчета. Вектор ускорения характеризует быстроту и направление изменения скорости материальной точки относительно тела отсчета.
Равномерным прямолинейным движением называется такое прямолинейное движение, при котором материальная точка (тело) движется по прямой и в любые равные промежутки времени совершает одинаковые перемещения.
Движение, при котором за равные промежутки времени тело совершает неравные перемещения называют неравномерным или переменным.
Скорость м/с. Ускорение м/с²
10) Скорость точки движущейся по окружности
Скорость точки направлена по касательной к окружности в каждый момент времени. Ее называют линейной скоростью. При таком движении скорость точки меняется по направлению, а по модулю остается неизменной.
11) Ускорение точки, движущейся по окружности равномерно
Равномерное движение точки по окружности является движением с ускорением.
Ускорение всегда направлено к центру окружности и называется центростремительным,
12) Ускорение точки, движущейся по окружности неравномерно
Если точка движется по окружности неравномерно, то ее полное ускорение рассматривают как состоящее из двух частей. Одна из частей — это центростремительное ускорение. Другой составляющей полного ускорения при криволинейном движении служит тангенциальное ускорение, оно отвечает за изменение величины скорости
а = аτ + аn (векторы)
а² = а²τ + а²n (не векторы)
13) Понятие об абсолютно твердом теле. Виды движения твердого тела.
АТТ – тело, расстояние между любыми двумя точками которого остается постоянным (деформацией можно пренебречь).
Виды движения:
Поступательное
Вращательное вокруг неподвижной оси
Плоское (плоско-параллельное)
Сферическое
Движение свободного тв. тела
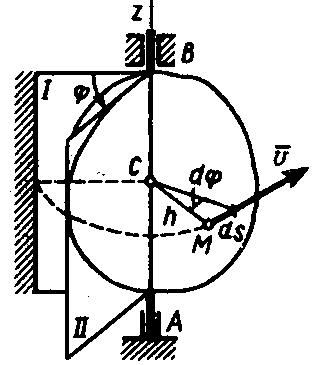
14) Вращение твердого тела вокруг неподвижной оси. Понятие об угловой скорости тела. Вектор угловой скорости.
Вращательное движение – движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
![]() Угловая
скорость
— векторная
величина, характеризующая быстроту и
направление вращения материальной
точки или абсолютно твёрдого тела
относительно оси вращения.
Угловая
скорость
— векторная
величина, характеризующая быстроту и
направление вращения материальной
точки или абсолютно твёрдого тела
относительно оси вращения.
Вектор угловой скорости направлен вдоль оси вращения в ту сторону, откуда вращение видно происходящим против хода часовой стрелки. Такой вектор определяет сразу и модуль угловой скорости, и ось вращения, и направление вращения вокруг этой оси.
15) Формула для вектора скорости точки тела, вращающегося вокруг неподвижной оси.

 =
=

16) Плоское движение твердого тела. Задание положения тела в пространстве. Понятие о полюсе.
Плоское движение – такое движение тв. тела, при котором все его точки движутся в плоскостях параллельных некоторой неподвижной плоскости.
Положение тв. тела в пространстве определяется положением трех его точек, не лежащих на одной прямой.
Полюс – точка, закон движения которой известен.
17) Векторные уравнения для скоростей точек твердого тела.

18) Понятие о мгновенном центре скоростей и пример его использования из лекции.
Мгновенный центр скоростей (МЦС) – при движении плоского тела в каждый момент времени существует точка, жестко связанная с плоским телом, скорость которой в этот момент равна нулю. Если МЦС (точку P) взять за полюс, то плоское движение для данного t представляет собой чистое вращательное движение вокруг точки P.
19) Классификация кинематических пар.
I. По числу связей:
КП 1ого класса (шар на плоскости, 5 степени свободы)
КП 2ого класса (цилиндр на плоскости, 4 степени свободы)
КП 3ого класса (сферический шарнир 3 степени свободы)
КП 4ого класса (цилиндрическая пара, кулачок-толкатель 2 степени свободы)
КП 5ого класса (плоская вращательная пара, плоская поступательная пара 1 степень свободы)
II. По характеру соприкосновения элемента:
Низшая (если геометрический элемент – плоскость)
Высшая (если геометрический элемент – точка или линия)
III. По характеры замыкания:
силовое
геометрическое
IV. Пары по характеру относительного движения:
Плоские
Пространственные
20) Понятие о группах Ассура и группах начальных звеньев.
Кинематические цепи, которые содержат только КП 5ого класса с W=0 называются гр. Ассура. Число звеньев в группе Ассура всегда четное, а число кинематических пар кратно 3.
Группа начальных звеньев – это кинематическая цепь, состоящая из стойки и подвижного звена. ГНЗ обладает одной степенью подвижности, поскольку его звенья образуют либо одну вращательную, либо одну поступательную кинематические пары.