

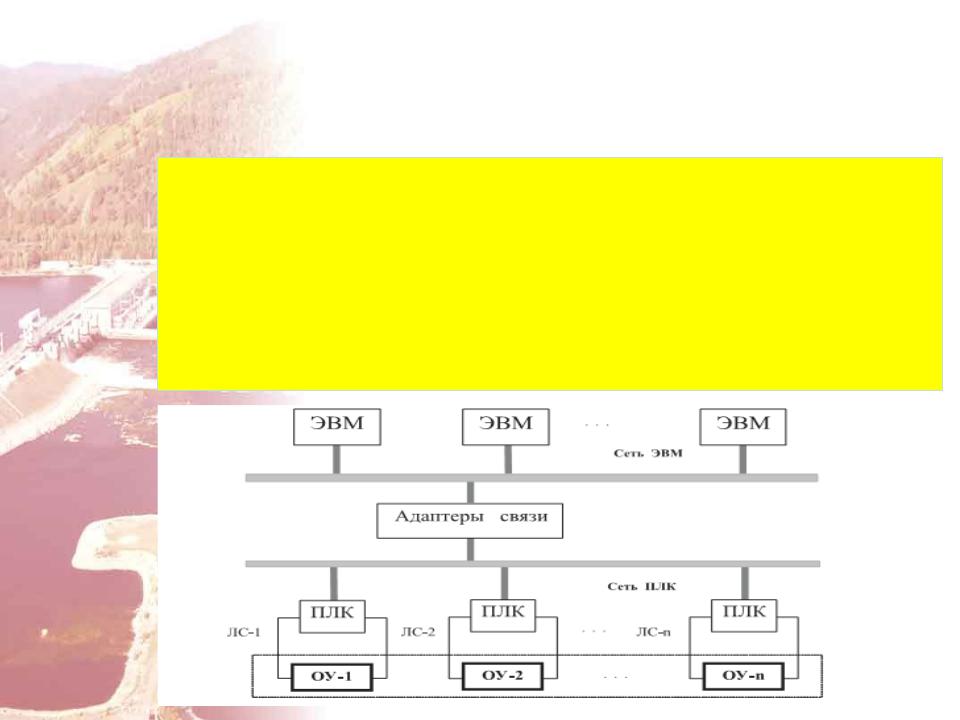
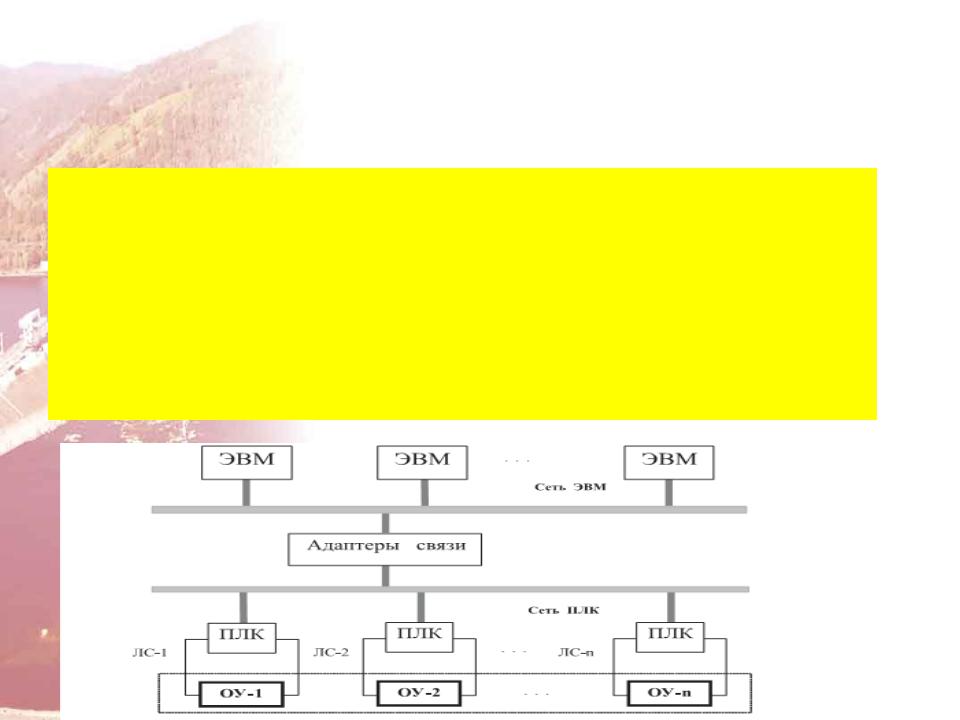
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
Термином ПЛК обозначают устройства, осуществляющие преобразование, обработку, хранение информации и выработку команд управления или
управляющих/регулирующих воздействий, реализованные на базе микропроцессорной техники для работы в локальных и распределенных системах управления в реальном масштабе времени
Основная функция ПЛК – это формирование сигнала рассогласования между регулируемой величиной и ее заданным значением, а также динамическое преобразование сигнала рассогласования по типовым алгоритмам (законам)
регулирования.
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
Основные эксплуатационные требования к ПЛК :
1.Безударность
2.Ограничение выходного сигнала ПЛК по верхнему и нижнему уровням и сигнализация о предельных значениях этих уровней;
3.Гальваническое разделение входных и выходных цепей
4.Связь с управляющими комплексами верхних уровней иерархии;
5.Автоподстройка и настройка (адаптивность) динамических параметров регулятора (адаптивные регуляторы).
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
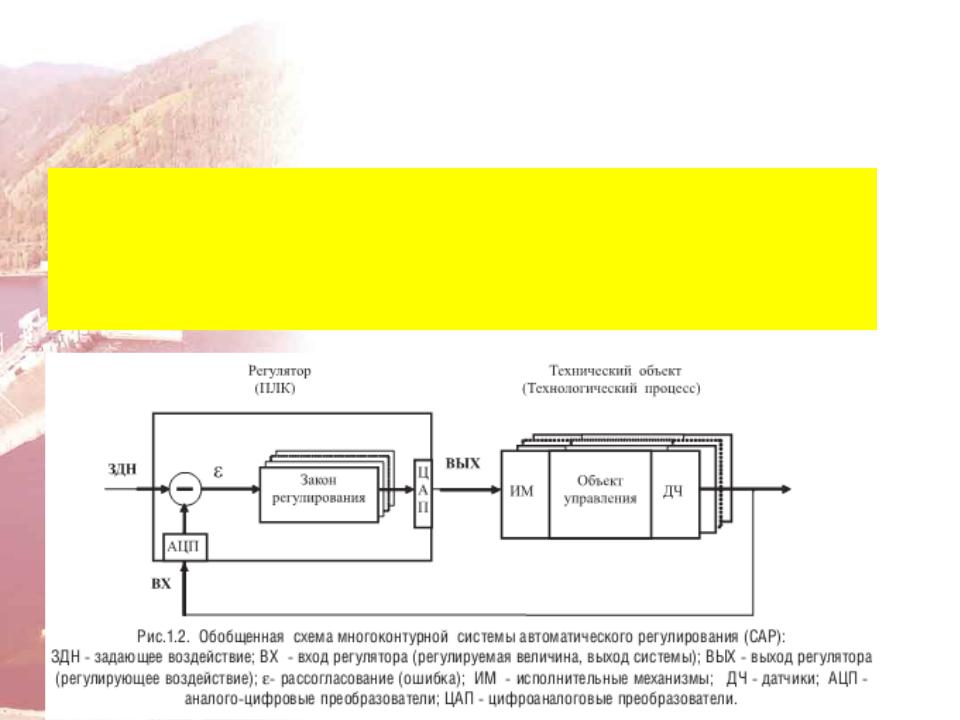
Процесс регулирования (управления) предполагает наличие двух подсистем : управляемой системы, т.е. одного или нескольких
объектов управления и управляющей или регулирующей системы
(регулятора), которые в совокупности образуют систему
автоматического регулирования (САР).
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
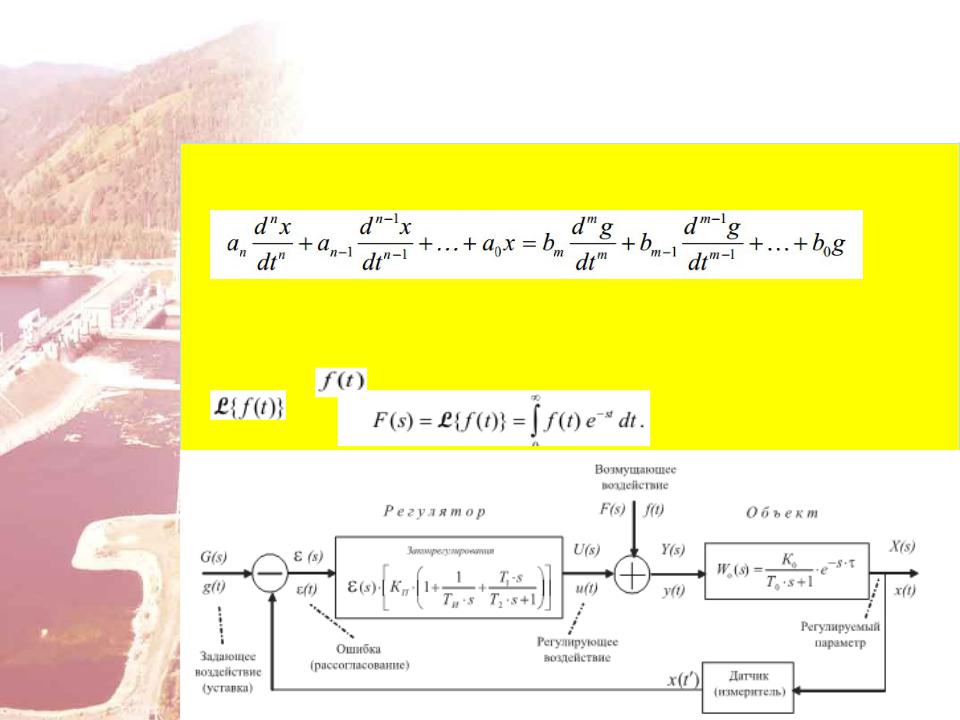
Процессы, происходящие в системах автоматического управления, описываются нелинейными дифференциальными уравнениями
Задача, которая поставлена |
в теории управления – вычисление значения на |
|
выходе |
системы при |
известном значении на входе. Чтобы упростить |
процедуру используется преобразование , которое позволило заменить |
||
решение |
дифференциальных уравнений алгебраическими вычислениями. Для |
|
функции |
вводится преобразование Лапласа , которое обозначается как |
|
:
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
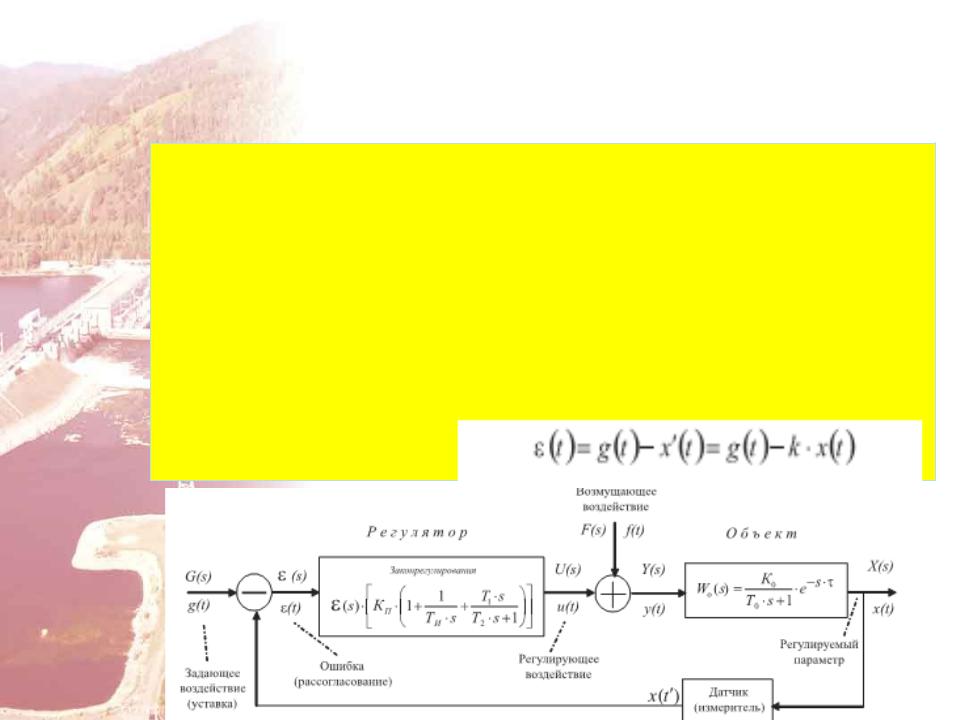
x(t) - регулируемая или выходная величина
g(t) - задающее воздействие(в некоторых задачах его называют уставкой).
ε(t) - разность между заданным g(t) и фактическим x(t) называют ошибкой или рассогласованием.
u(t), вырабатываемое регулятором называют регулирующим воздействием .
f(t), стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной, называют возмущающим воздействием.
Задача системы состоит в том, чтобы возможно точнее воспроизводить на выходе x(t) задаваемый (на входе) закон изменения g(t) и возможно полнее подавлять влияние возмущающего воздействия f(t), а также других внешних и внутренних помех, если они имеются.
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
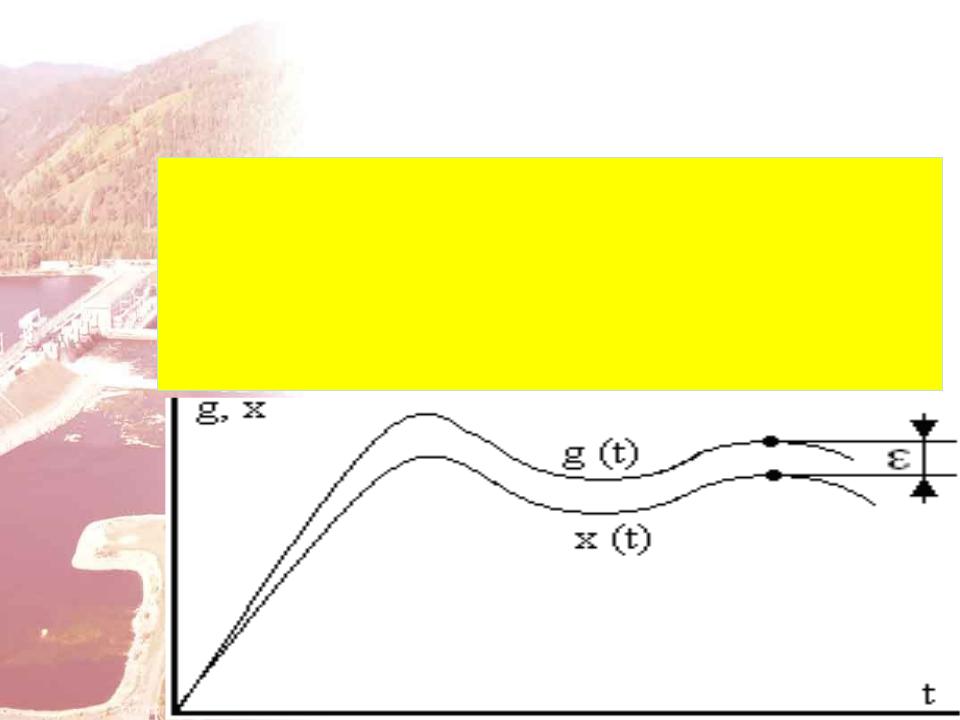
Статические и астатические системы автоматического регулирования (САР)
статическая САР - при стремлении возмущающего и управляющего воздействия к постоянной величине отклонение регулируемой величины также стремится к постоянным отличным от нуля величине и зависящей от величины приложенного воздействия
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
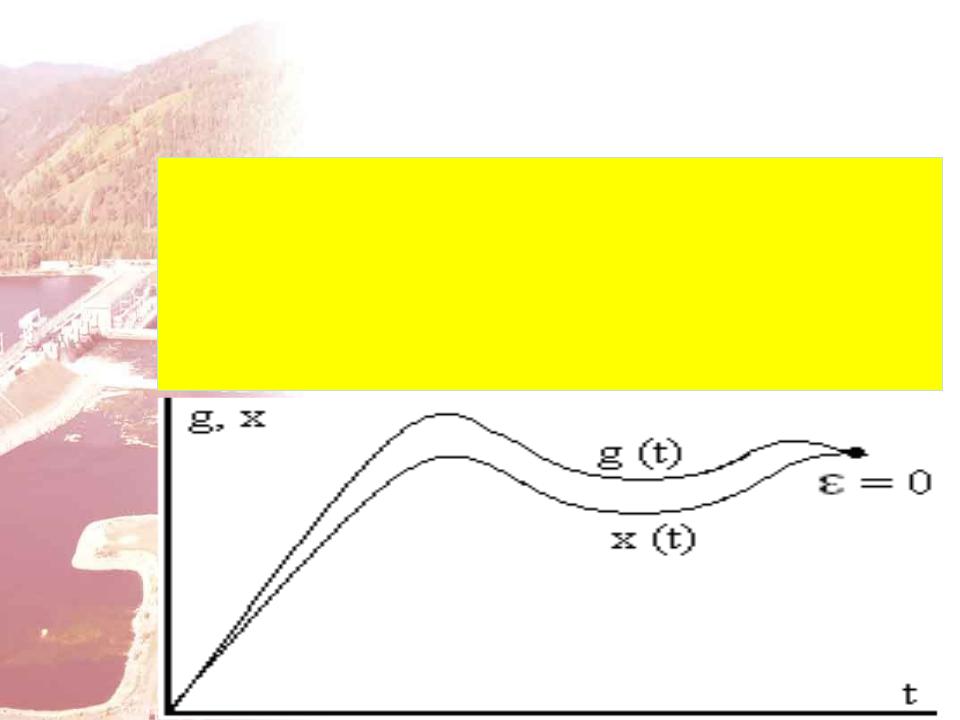
Статические и астатические системы автоматического регулирования (САР)
астатическая САР - при стремлении возмущающего или управляющего воздействия к постоянной величине отклонение регулируемой величины стремится к нулю и не зависит от величины приложенного воздействия. В идеальных астатических системах установившаяся ошибка равна нулю.

СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
КЛАССИФИКАЦИЯ САР
По виду задающего воздействия:
1.при g(t) = const САР называют собственно системами
автоматического регулирования (системами стабилизации) . Это типичные системы регулирования по заданной настройке/уставке регулятора.
2.при g(t), заранее заданной во времени (задана программа (закон)изменения воздействия), говорят о программном
автоматическом регулировании и о системах программного регулирования. При этом выходная/регулируемая величина должна следовать заданной программе/закону изменения во времени.
3.при g(t), изменяющейся случайным/произвольным образом, САР называют следящей системой.
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
КЛАССИФИКАЦИЯ САР
По виду регулируемого параметра:
•регуляторы температуры, давления, влажности, разряжения, расхода, состава и т. п.
По характеру изменения регулирующего воздействия:
•регуляторы с линейными законами регулирования.
—пропорциональные (П-регуляторы);
—пропорционально-интегральные (ПИ-регуляторы);
—пропорционально-дифференциальные (ПД-регуляторы);
—пропорционально-интегрально-дифференциальные (ПИД-
регуляторы).
•регуляторы с нелинейными законами регулирования
(например: двухпозиционные регуляторы температуры в холодильных машинах, трехпозиционных дискретных системах выходной сигнал может принимать три значения: –1, 0, +1, т.е.
•“меньше”, “норма”, больше”.)
СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НА ОСНОВЕ ПРОГРАММИРУЕМЫХ ЛОГИЧЕСКИХ КОНТРОЛЛЕРОВ
КЛАССИФИКАЦИЯ САР
В зависимости от вида используемой энергии регуляторы подразделяются на:
•электрические (электромеханические, электронные),
•пневматические,
•гидравлические
•комбинированные.
В зависимости от задающего воздействия и параметров объекта регулирования подбирают регулятор с определенной характеристикой и тем самым достигается необходимое
качество регулирования. В промышленных регуляторах эти величины называются параметрами настройки.
Параметрами настройки являются: коэффициент усиления, зона нечувствительности, постоянная времени интегрирования, постоянная времени дифференцирования и т. д.