

Трухан. Динамика твердого тела
.pdf11
центральные моменты инерции A, B, C. Построить главные
оси |
инерции |
тела |
для |
точки O |
с координатами |
ξO = a, ηO = b, ζO = O. |
|
|
|||
|
Решение. В точке O построим систему координат |
||||
OXYZ с осями, |
параллельными главным центральным осям. |
||||
Так |
как точка |
O |
лежит |
в плоскости, |
содержащей две |
главные центральные оси, то по выводу 4 из задачи 1.1 ось OZ - главная для точки O. Значит нужно найти только две главные оси.
Пусть некоторая ось u лежит в плоскости проходит через точку O и образует с осью OX угол α. Тогда направляющие косинусы оси u в системе OXYZ будут равны соответственно cosα, sinα, 0. Момент инерции тела относительно оси u приобретает вид
Ju = J x cos2 α + J y sin2 α −2J xy sinα cosα. (1.19)
Так как в данном случае
cos2 α +cos2 β +cos2 γ = cos2 α +sin2 α =1
независимо от значения угла α, то для отыскания
направления главной оси нет необходимости рассматривать задачу на условный экстремум, и направление главной оси
можно найти из условия стационарности функции Ju :
|
|
dJu |
= 0. |
|
(1.20) |
|||
Что дает |
|
dα |
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
− J x sin 2α + J y sin 2α −2J xy cos 2α = 0. |
||||||||
Откуда |
1 |
|
|
2Jxy |
|
|||
α = |
arctg |
. |
||||||
2 |
J y |
− Jx |
||||||
|
|
|
|
|||||
Но из задачи 1.1 следует
J x = A +mb2 , J y = B + ma2 , Jxy = mab.
|
|
|
12 |
|
|
И, значит, |
1 |
|
2mab |
|
|
α = |
|
|
|||
|
arctg |
B − A +m(a2 −b2 ) |
. |
(1.21) |
|
2 |
|||||
Таким образом, повернув ось OX вокруг точки O на угол α, определяемый равенством (1.21), мы совместим ее с
главной осью. Момент инерции относительно построенной главной оси может быть найден в результате подстановки α из равенства (1.21) в выражение (1.19).
§ 2. Подсчет основных динамических величин для твердого тела с одной неподвижной точкой
2.1. Кинетический момент. В каждый момент времени твердое тело с неподвижной точкой О имеет такое
же распределение скоростей Vi точек, как при вращении
вокруг неподвижной оси, т.е. |
|
|
|
|
|
|
|
|
|
|
Vi |
= |
ω |
× |
ri |
, где |
ω |
- вектор |
|||
мгновенной угловой скорости, |
ri |
- радиус-вектор i -й точки, |
||||||||
проведенный из неподвижной точки. Поэтому кинетический момент тела относительно точки О будет
KO = ∑miri ×Vi = ∑miri ×(ω ×ri )
или с помощью тензора инерции J KO = Jω.
Если тензор инерции J записан в системе осей, главных для точки О, то он имеет диагональный вид. Вектор угловой
скорости в этих осях |
|
= pi |
|
|
|
|
|
|
|
|
|
||||||
ω |
|
+qj |
+rk , |
и вектор |
|||||||||||||
кинетического момента |
|
||||||||||||||||
|
|
O = Api |
|
+ Bqj |
|
+Crk |
|
|
(2.1) |
||||||||
|
K |
|
|
|
|||||||||||||
( A, B, C - осевые моменты инерции). Векторы ω и KO , вообще говоря, не коллинеарны. Они, очевидно, совпадают

13
по направлению лишь в том случае, если ось вращения совпадает с главной осью. При этом KO = Jω = λω , где λ является коэффициентом пропорциональности. И, значит, 
 J −λE
J −λE
 ω = 0. Условие нетривиальности решения этого
ω = 0. Условие нетривиальности решения этого
уравнения: det
 Jik −λδik
Jik −λδik 
 = 0. Отсюда следует, что
= 0. Отсюда следует, что
собственные векторы матрицы J определяют направления главных осей инерции, а собственные значения этой матрицы
– моменты инерции относительно главных осей.
2.2. Кинетическая энергия. |
Кинетическая энергия |
|||||||||
T = |
1 |
∑miVi |
2 |
= |
1 |
∑mihi |
2ω2 = |
1 |
JOωω2. (2.2) |
|
2 |
|
2 |
2 |
|||||||
|
|
|
|
|
|
|
|
|||
Здесь JOω = ∑mihi2 - момент инерции тела относительно мгновенной оси вращения, hi - расстояние i-й точки от этой оси.
По теореме Гюйгенса-Штейнера JOω = JM ω +md 2
(d - расстояние между мгновенной осью вращения и осью, проходящей через центр масс параллельно мгновенной,
JM ω - момент инерции тела относительно последней).
Выражение кинетической энергии можно представить в форме
T = 12 md 2ω2 + 12 JM ωω2 = 12 mVM 2 + 12 J M ωω2 , (2.2)
где VM - скорость центра масс тела. Формула (2.2)
представляет собой аналитическое выражение теоремы Кенига для твердого тела. Обратим внимание, что кинетическая энергия относительного движения
T '= |
1 |
JM ωω2 |
есть кинетическая энергия вращательного |
|
2 |
||||
|
|
|

14
движения вокруг оси, проходящей через центр масс
параллельно мгновенной. |
|
|
|
|
|
|
|
|||||||
Выражение |
(2.2) |
кинетической |
энергии |
в |
осях |
|||||||||
Oξηζ , главных для |
неподвижной |
точки, |
записывается в |
|||||||||||
виде |
|
|
1 |
(Ap2 + Bq2 |
+Cr 2 ). |
|
|
|
||||||
|
|
T = |
|
|
(2.3) |
|||||||||
|
|
|
|
|||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
Аналогично формула (2.2) в главных центральных |
||||||||||||||
осях может быть представлена так: |
|
|
|
2 ). |
|
|||||||||
T = |
1 |
mVM |
2 |
+ |
1 |
(AM pM |
2 + BM qM |
2 |
+CM rM |
(2.4) |
||||
|
|
|
|
|||||||||||
2 |
|
|
2 |
|
|
|
|
|
|
|
||||
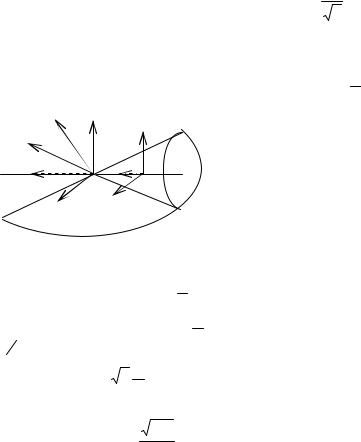
Задача 2.1. Однородный круговой конус массы m с
высотой h и углом при вершине 60D катится без проскальзывания по неподвижному конусу с углом при
вершине 120D (см. рис. 2.1). Найти величину вектора кинетического момента KO и угол β, который образует этот
вектор с вектором ω. Подсчитать кинетическую энергию T конуса, если центр его основания движется с постоянной по величине скоростью V.
Решение. Величину вектора KO найдем с помощью равенства
KO = 
O 60o O1
120o
A2 p2 + B2q2 +C 2r 2 . (2.5)
Так как центральный эллипсоид инерции – эллипсоид вращения, а точка O лежит на главной центральной
оси, то главные оси для этой точки получаются
параллельным переносом главных
Рис. 2.1
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
центральных осей MξMηMζM . |
Центр масс однородного |
|||||||||||||
кругового конуса лежит на расстоянии |
|
3 |
h от его вершины, |
|||||||||||
4 |
||||||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
||||
т.е. OM = |
h. Главные |
центральные моменты |
инерции |
|||||||||||
4 |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
конуса равны |
|
|
3 |
|
mR2 , где R = h |
|
||||||||
AM = BM = |
|
3 |
m(4R2 +h2 ), CM |
= |
|
- |
||||||||
80 |
|
|||||||||||||
|
|
|
10 |
|
|
|
|
3 |
|
|||||
радиус |
основания |
конуса. |
|
Таким |
образом, |
|||||||||
A = B = AM
_
ω
ζ
+mOM 2 |
= |
|
13 |
mh2 |
, |
C =CM = |
|
|
1 |
mh2. |
Вектор |
||||
20 |
10 |
||||||||||||||
|
|
|
|
|
|
|
|
ω |
|
||||||
_ |
|
|
|
|
|
угловой |
|
скорости |
|
|
|||||
|
|
|
|
|
направлен |
|
по |
||||||||
Ko η |
|
|
|
|
|
|
|||||||||
|
|
|
ηM |
|
мгновенной |
|
оси |
||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
вращения, |
|||||
|
|
ζM M |
|
совпадающей с линией |
|||||||||||
O |
|
|
|
|
|
касания |
подвижного и |
||||||||
|
|
|
|
|
неподвижного конусов. |
||||||||||
ξ |
ξM |
|
Центр |
|
|
|
основания |
||||||||
|
|
|
|
|
|
конуса |
|
|
движется |
со |
|||||
Рис. 2.2 |
|
|
|
|
|
скоростью |
V |
|
и |
||||||
|
|
|
|
|
находится |
|
|
от |
|||||||
|
|
|
|
|
|
|
|
||||||||
мгновенной оси на расстоянии h2 , поэтому угловая скорость
ω = |
V |
= |
2V |
. Проекции вектора |
ω |
на оси системы Oξηζ : |
||||||
h 2 |
h |
|||||||||||
|
|
|
|
|
|
|
|
|
||||
p = 0, |
q = |
V |
, |
r = |
3 V |
. Подставляя в (2.5) найденные |
||||||
|
||||||||||||
|
|
|
|
|
h |
|
|
h |
|
|
|
|
значения моментов инерции и компонентов вектора угловой
скорости, получим KO = |
181 mVh. Вектор |
|
O образует с |
K |
|||
|
20 |
|
|

|
|
|
|
|
|
|
|
|
|
|
|
|
|
16 |
|
|
|
|
|
|
|
|
||
осью |
|
Oζ |
|
угол |
|
|
α = arctg |
Bq |
= arctg |
13 . |
Откуда |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Cr |
|
|
|
2 3 |
|
β = |
30D −α |
. |
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Для подсчета |
воспользуемся |
формулой (2.3). |
||||||||||||||||||
Используя найденные при подсчете |
KO значения |
A, B, C и |
||||||||||||||||||||||
p, q, r, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
1 |
|
13 |
|
|
2 V |
2 |
|
1 |
|
2 3V |
2 |
|
|
19 |
|
2 |
|
|
|||||
T = |
|
mh |
|
|
mh |
|
|
|
mV |
|
|
|||||||||||||
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
= |
|
|
. |
|
|||||
2 |
20 |
|
h |
2 |
10 |
|
h |
2 |
|
|
40 |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
§ 3. Уравнения движения тела с неподвижной точкой. Случай Эйлера и случай Лагранжа
3.1. Уравнения движения. Твердое тело с одной неподвижной точкой имеет три степени свободы.
Часто в качестве координат, однозначно задающих положение твердого тела с неподвижной точкой, берут углы Эйлера: ψ - угол
ζ |
Z |
|
прецессии, |
|
θ |
- |
угол |
||
_. |
_._ |
η |
нутации, |
ϕ |
- |
угол |
|||
ϕ |
θ ψ |
|
собственного |
вращения |
|||||
|
_ |
Y |
(см. рис. 3.1). Эти углы |
||||||
|
и |
их |
производные |
||||||
ψ |
θ. |
|
связаны с |
|
проекциями |
||||
ϕ |
|
вектора |
|
|
угловой |
||||
X |
ξ |
|
скорости |
ω |
на главные |
||||
|
оси |
кинематическими |
|||||||
|
|
||||||||
|
Рис. 3.1 |
|
соотношениями Эйлера: |
||||||
|
p =ψ sinθ sin ϕ+θ cosϕ |
|
|
|
|
|
|
||
|
q =ψ sinθ cos ϕ−θ sin ϕ |
|
|
|
|
|
(3.1) |
||
r =ψ cosθ +ϕ.

17
Уравнения динамики тела с одной неподвижной точкой получим с помощью теоремы об изменении кинетического момента
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d |
K |
O |
= |
|
|
|
|
|
|
|
O. |
(3.2) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Запишем вектор |
|
|
|
O в проекциях на |
главные |
оси, |
|||||||||||||||||||||||||||||||||||||||||||||
K |
|||||||||||||||||||||||||||||||||||||||||||||||||||
построенные для неподвижной точки |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
O = Api |
|
+ Bqj |
|
|
+Crk |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
Так как система главных осей подвижная и жестко |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dk |
= |
ω |
|
|
|
|
||||||||
|
|
|
|
|
di |
= |
, |
|
|
dj |
|
= |
|
× |
|
, |
|
|
|
|
|||||||||||||||||||||||||||||||
связана с телом, то |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
×k |
. |
|||||||||||||||||||||||||||||||
|
|
|
ω |
×i |
|
|
|
ω |
j |
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
d' |
|
|
|
|
dt |
|
|
dt |
|
dt |
|
|
|
|||||||||||||||||||||||||||||||||||||
Обозначим |
K |
O |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
= Api |
+ Bqj +Crk |
. Тогда |
|
теорему |
об |
|||||||||||||||||||||||||||||||||||||||||||||
dt |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
изменении кинетического момента можно записать в форме
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dK |
O |
= |
d' KO |
+ |
|
× |
|
O = |
|
|
O . |
(3.3) |
|||||
|
|
|
|
|
ω |
K |
M |
|||||||||||||||
|
|
|
|
|
dt |
|
||||||||||||||||
|
|
|
|
|
|
dt |
|
|||||||||||||||
|
d' |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Здесь |
- изменение вектора KO |
относительно |
||||||||||||||||||||
dt |
||||||||||||||||||||||
выбранной подвижной системы координат (иначе относительная скорость конца вектора KO ), а ω ×KO -
изменение вектора KO за счет движения подвижной системы координат (переносная скорость конца вектора KO ). Таким образом, движение конца вектора KO рассматривается как
сложное: вместе с подвижной системой координат, жестко связанной с телом и относительно нее.
Проецируя равенство (3.3) на главные оси, построенные для неподвижной точки, получаем динамические уравнения Эйлера:
Ap +(C − B)qr = Mξ

18 |
|
Bq +(A −C)pr = Mη |
(3.4) |
Cr +(B − A)qp = Mζ . |
|
Уравнения (3.4) совместно с уравнениями (3.1) описывают движение тела с неподвижной точкой и записываются в подвижных осях, жестко связанных с телом, главных для неподвижной точки.
Общее решение системы (3.4) и (3.1) позволяет в каждый момент найти значения углов Эйлера, однозначно задающих положение тела с неподвижной точкой, т.е.
ψ =ψ(t,C1,...,C6 ),
θ =θ(t,C1,...,C6 ), (3.5) ϕ = ϕ(t,C1 ,...,C6 ).
Известно, что лишь в трех случаях при произвольных начальных условиях интегрирование системы уравнений Эйлера может быть доведено до квадратур. Это случаи Эйлера, Лагранжа и Ковалевской. Здесь будет рассмотрено решение задач в случаях Эйлера и Лагранжа.
3.2. Случай Эйлера. Этот случай соответствует движению по инерции, когда MO = 0.
Тогда при произвольной форме тела сохраняется вектор кинетического момента KO и кинетическая энергия
T. Интегрирование системы динамических уравнений Эйлера может быть доведено до квадратур, которые получаются в виде эллиптических интегралов. При некоторых начальных условиях эти квадратуры вырождаются в обыкновенные интегралы, и тогда p, q, r
являются гиперболическими функциями времени.
Задача решена до конца, если найдена зависимость эйлеровых углов от времени.
Так как KO = const, возьмем неподвижную ось OZ
вдоль вектора кинетического момента. Тогда

19
Ap = KO sinθ sin ϕ,
Bq = KO sinθ cosϕ,
Cr = KO cosθ.
Из (3.6) находим |
Cr(t), |
cosθ = |
|
|
KO |
tg ϕ = |
Ap(t) |
Bq(t). |
(3.6)
(3.7)
(3.8)
Чтобы найти ψ, умножим |
первое из уравнений (3.1) на |
||||||||||
sin ϕ, а второе – на cos ϕ и сложим |
|
|
|
|
|
||||||
|
psin ϕ+ q cosϕ =ψ sinθ. |
|
|||||||||
Откуда |
|
|
|
psin ϕ+ q cosϕ |
|
|
|
||||
|
ψ = |
. |
|
|
|||||||
|
|
|
|||||||||
|
|
|
|
|
sinθ |
|
|
|
|
|
|
Используя (3.7) и (3.8), найдем выражения |
|
||||||||||
|
sinθ = |
1 |
A2 p2 + B2q2 , |
|
|||||||
|
Ap |
|
KO |
|
|
|
|
Bq |
|
||
sin ϕ = |
|
|
cosϕ = |
|
|
||||||
A2 p2 + B2q2 , |
|
A2 p2 + B2q2 . |
|
||||||||
Тогда |
|
|
|
|
|
|
|
|
|
|
|
|
ψ = |
|
|
Ap2 |
+ Bq2 |
K |
O |
(3.9) |
|||
|
|
A2 p2 |
+ B2q2 |
||||||||
|
|
|
|
|
|||||||
и |
|
|
|
|
|
Ap2 (t)+ Bq2 (t) |
|
||||
|
|
|
|
|
t |
|
|||||
|
ψ =ψO + KO ∫0 |
|
dt. (3.10) |
||||||||
|
A2 p2 (t)+ B2q2 (t) |
||||||||||
Таким образом, углы Эйлера θ, ϕ и ψ могут быть найдены
из равенств (3.7), (3.8) и (3.10), если определены p(t), q(t), r(t).

20
Задача 3.1. Однородный эллипсоид с моментами инерции A, 32 A, 2A движется вокруг своего неподвижно
закрепленного центра масс. В начальный момент эллипсоиду сообщена угловая скорость Ω =ω  2i +ωk , где i , j, k -
2i +ωk , где i , j, k -
единичные орты главных центральных осей инерции. Получить уравнения движения эллипсоида в квадратурах.
Решение. Динамические уравнения Эйлера в этом
случае |
|
|
|
|
|
|
|
dp |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
2 |
|
+ qr = 0, |
|
|
||||||||
|
|
|
|
|
|
|
dt |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
3 dq |
|
− 2 pr = 0, |
|
(3.11) |
|||||||
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
4 dr |
+qp = 0. |
|
|
||||||||
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
Умножив первое уравнение на p, третье – на r |
и приравняв |
|||||||||||||||||
затем левые части этих уравнений, получим |
|
|
||||||||||||||||
p |
dp |
= 2r |
|
dr |
|
→ |
|
p2 − p |
2 |
= r2 −r |
2 |
. |
||||||
|
|
|
|
|
O |
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||||||
|
dt |
|
|
|
|
|
dt |
|
|
|
|
|
2 |
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Так как pO = rO |
2, то p = r |
|
2 в любой момент времени. |
|||||||||||||||
Разделив первое уравнение (3.11) на второе, получим |
||||||||||||||||||
уравнение с разделяющимися переменными |
|
|
||||||||||||||||
|
|
|
|
|
|
4 p dp = −3q dq. |
|
|
||||||||||
Откуда |
p2 = |
1 |
(4 pO |
2 |
−3q2 ), |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
4 |
|
|
|
|
|
|
−3q2 ). |
|
|
|
|
|||||
и, кроме того, |
r 2 |
= |
1 |
(4 pO |
2 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
||||||||||||
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Связь между p, q и r можно было получить и
непосредственно, используя интеграл энергии и закон сохранения кинетического момента: