

ЭУР
.pdfМинистерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Юго-Западный государственный университет»
Кафедра _«Теоретическая механика и мехатроника»____________
КУРСОВАЯ РАБОТА
по дисциплине «Компьютерное управление мехатронными системами»
(наименование учебной дисциплины)
на тему «Проектирование цифровой системы управления электромеханическим усилителем руля»
Специальность |
220401 - Мехатроника_____ |
|
(код, наименование) |
____________________________________________________________________
Автор работы |
____________________ _________________________ |
|
|
(инициалы, фамилия) |
(подпись, дата) |
Группа ___________ |
|
|
Руководитель работы |
____________________ |
___________________ |
|
(инициалы, фамилия) |
(подпись, дата) |
Работа защищена ________________________ |
|
|
|
(дата) |
|
Оценка_____________________ |
|
|
Председатель комиссии _________________________ ____________________
(подпись, дата) (инициалы, фамилия)
Члены комиссии _________________________ __________________________
(подпись, дата) (инициалы, фамилия)
_________________________ __________________________
(подпись, дата) (инициалы, фамилия)
_________________________ |
__________________________ |
(подпись, дата) |
(инициалы, фамилия) |
Курск, 2011 г.
Министерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего профессионального образования
«Юго-Западный государственный университет»
Кафедра _«Теоретическая механика и мехатроника»____________
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
Студент _____________________ шифр _________ группа _______
(фамилия, инициалы)
1.Тема «Проектирование цифровой системы управления электромеханическим усилителем руля»
2.Срок представления работы (проекта) к защите «15» мая 2011 г.
3.Исходные данные:
Спроектировать цифровую систему автоматического управления приводом усилителя руля посредством микроконтроллера.
Система управления должна:
1)Автоматическое изменение коэффициента усиления в зависимости от дорожной обстановки;
2)Обеспечивать автоматическую остановку усилителя при достижении конечного положения руля;
3)Предусматривать возможность экстренной остановки двигателя;
4)Время переходного процесса t<0,1с
5)Точность обеспечения заданного угла поворота фары <1%
6)Напряжение питание системы: 12 В 0.5В постоянного тока.
7)Диапазон рабочих температур: -40…+60 0С
Руководитель работы (проекта) _________________ |
____________________ |
(подпись, дата) |
(инициалы, фамилия) |
Задание принял к исполнению ____________________________
(подпись, дата)
3. Функциональная схема системы управления электромеханическим усилителем руля
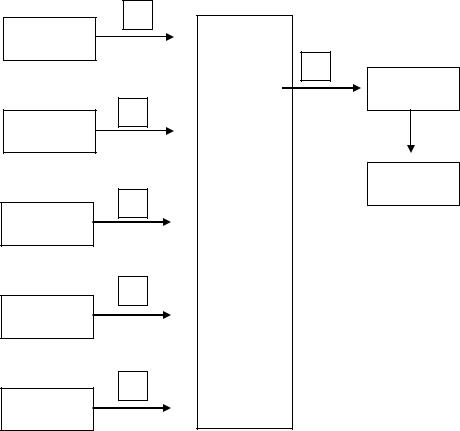
В соответствии с поставленными задачами и в целях обеспечения наилучших качественных характеристик в рамках данной работы предложена следующая функциональная схема ЦСАУ. Управление будет происходить при помощи микроконтроллера.
ТД
ДУ
ДТ
СС
1
МК
4
У
7
Д
1
1
1
СЧ
Рисунок 6.1. Функциональная схема устройства
На данном рисунке приняты следующие условные обозначения:
МК – микроконтроллер, включающий АЦП и ШИМ на кристалле.
Микроконтроллер осуществляет реализацию необходимых законов управления электродвигателем, а также управляет индикацией, и обработкой сигналов с датчиков;
ТД – тензодатчики, измеряют момент, приложенный водителем к рулевому
колесу;
ДУ – датчик угла поворота, измеряет угол поворота рулевого колеса;
ДТ – датчик тока, измеряет ток якоря двигателя;
СС – сигнал о скорости автомобиля, микроконтроллер получает информацию со штатного датчика скорости движения автомобиля;
СЧ – сигнал о частоте вращения коленчатого вала, микроконтроллер получает информацию со штатного датчика частоты вращения;
У – усилитель, осуществляет усиление цифрового сигнала системы управления электродвигателем;
Д– электродвигатель постоянного тока.
4.Выбор электронных компонентов
Структурно электрическая схема состоит из 3 групп:
управляющий контроллер,
сенсорная система устройства, включающая в себя оптические энкодеры, тензомостовые датчики, инструментальные и операционные усилители сигналов,
силовая часть управления электродвигателем постоянного тока с датчиками тока.
4.1 Выбор микроконтроллера
Выбор микроконтроллера основывается необходимым объемом памяти для
записи управляющей программы, а также на рациональном и экономическом
факторах.
На данный момент рынок электроники более чем такими продуктами,
поэтому дополнительным критерием выбора явилось соотношение цена/характеристики и доступность информации об изделии, кроме того учитывалась необходимость наличия большого количества (26) линий ввода-
вывода данных. Наиболее подходящим является контроллер от фирмы Atmel –
ATMega16.
Отличительные особенности данного микроконтроллера следующие:
8-разрядный высокопроизводительный AVR микроконтроллер с малым потреблением
Прогрессивная RISC архитектура
o 130 высокопроизводительных команд, большинство команд выполняется за один тактовый цикл
o 32 8-разрядных рабочих регистра общего назначения o Полностью статическая работа
o Производительность приближается к 16 MIPS (при тактовой частоте 16 МГц)
oВстроенный 2-цикловый перемножитель
Энергонезависимая память программ и данных
o16 Кбайт внутрисистемно программируемой Flash памяти (In-
System Self-Programmable Flash)
o Обеспечивает 1000 циклов стирания/записи
o Дополнительный сектор загрузочных кодов с независимыми битами блокировки
Внутрисистемное программирование встроенной программой загрузки
oОбеспечен режим одновременного чтения/записи (Read-While- Write)
o 512 байт EEPROM
o Обеспечивает 100000 циклов стирания/записи
o 1 Кбайт встроенной SRAM
o Программируемая блокировка, обеспечивающая защиту программных средств пользователя
Интерфейс JTAG (совместимый с IEEE 1149.1)
o Возможность сканирования периферии, соответствующая стандарту JTAG
o Расширенная поддержка встроенной отладки
oПрограммирование через JTAG интерфейс: Flash, EEPROM памяти,
перемычек и битов блокировки
Встроенная периферия
oДва 8-разрядных таймера/счетчика с отдельным предварительным
делителем, один с режимом сравнения
oОдин 16-разрядный таймер/счетчик с отдельным предварительным делителем и режимами захвата и сравнения
o Счетчик реального времени с отдельным генератором o Четыре канала PWM
o 8-канальный 10-разрядный аналого-цифровой преобразователь o 8 несимметричных каналов
o 7 дифференциальных каналов (только в корпусе TQFP)
o 2 дифференциальных канала с программируемым усилением в 1, 10
или 200 крат (только в корпусе TQFP)
o Программируемый последовательный USART
o Последовательный интерфейс SPI (ведущий/ведомый)
o Программируемый сторожевой таймер с отдельным встроенным генератором
oВстроенный аналоговый компаратор
Выводы I/O и корпуса
o32 программируемые линии ввода/вывода
o40-выводной корпус PDIP и 44-выводной корпус TQFP
Рабочие напряжения
o4,5 - 5,5 В
Рабочая частота o 0 - 16 МГц
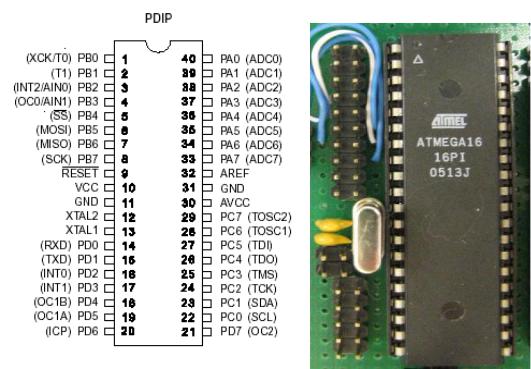
На рисунке 6.2 приведена цоколевка микроконтроллера ATmega16 и
далее приведено назначение выводов.
Рис. 6.2. Микроконтроллер фирмы ATMEL ATmega 16
Ниже приведено описание выводов микроконтроллера Atmega16. VCC - вывод источника питания
GND - земля
Port A (PA7..PA0) – служит в качестве аналоговых входов для АЦП.
Он также может быть использован как 8-ми битовый двунаправленный порт ввода/вывода, если АЦП не используется. Пины порта также могут подключать внутренние резисторы (выбранные для каждого бита). Выходные каналы порта имеют симметричные характеристики с высокой разрешающей и энергетической способностью. Когда пины РА0…РА7 используются как входы и внешнее сопротивление имеет очень малое значение, включаются внутренние резисторы микроконтроллера. При наличии условия сброса даже при
неактивном режиме работы часов происходит сброс единичных сигналов с линий порта.
Port В (PВ7..PВ0) – служит как 8-ми битовый двунаправленный порт ввода/вывода. Пины порта также могут подключать внутренние резисторы
(выбранные для каждого бита). Выходные каналы порта имеют симметричные характеристики с высокой разрешающей и энергетической способностью.
Когда пины РВ0…РВ7 используются как входы и внешнее сопротивление имеет очень малое значение, включаются внутренние резисторы микроконтроллера. При наличии условия сброса даже при неактивном режиме работы часов происходит сброс единичных сигналов с линий порта. Порт В также служит для реализации специальных возможностей, предусмотренных данным микроконтроллером.
Port С (PС7..PС0) – служит как 8-ми битовый двунаправленный порт ввода/вывода. Пины порта также могут подключать внутренние резисторы
(выбранные для каждого бита). Выходные каналы порта имеют симметричные характеристики с высокой разрешающей и энергетической способностью.
Когда пины РC0…РC7 используются как входы и внешнее сопротивление имеет очень малое значение, включаются внутренние резисторы микроконтроллера. При наличии условия сброса даже при неактивном режиме работы часов происходит сброс единичных сигналов с линий порта. При использовании JTAG интерфейса внутренние резисторы на пинах РС5, РС3,
РС2 сохраняют активное состояние даже при наличии сигнала сброса. Порт С также служит для реализации JTAG интерфейса и некоторых других специальных возможностей, предусмотренных данным микроконтроллером.
Port D (PD7..PD0) – служит как 8-ми битовый двунаправленный порт ввода/вывода. Пины порта также могут подключать внутренние резисторы
(выбранные для каждого бита). Выходные каналы порта имеют симметричные характеристики с высокой разрешающей и энергетической способностью.
Когда пины РD0…РD7 используются как входы и внешнее сопротивление
имеет очень малое значение, включаются внутренние резисторы микроконтроллера. При наличии условия сброса даже при неактивном режиме работы часов происходит сброс единичных сигналов с линий порта. Этот порт также служит для реализации некоторых других специальных функций данного микроконтроллера.
RESET - Вход сброса. Удержание на входе низкого уровня в течение двух машинных циклов (если работает тактовый генератор), сбрасывает устройство.
XTAL1 - Вход инвертирующего усилителя генератора и вход внешнего тактового сигнала.
XTAL2 - Выход инвертирующего усилителя генератора.
AVCC – Пин, осуществляющий подачу питания на порт А и АЦП. Он должен присоединяться к пину VCC, даже если не используется ADC. Если используется ADC, то должен присоединяться к VCC через фильтр низкого уровня.
AREF – Аналоговый вход на АЦП.
Функциональная блок-схема микроконтроллера ATmega16 представлена на рисунке 6.3.