

Министерство НАУКИ И ВЫСШЕГО образования Российской Федерации
Федеральное государственное автономное образовательное учреждение высшего образования
«Национальный исследовательский Томский политехнический Университет»

Инженерная школа новых производственных технологий
Отделение машиностроения
отчет по практическо-лабораторной работе № 1
Составление кинематической схемы механизма и структурный анализ по механической модели
по дисциплине:
МЕХАНИКА 2.2
Исполнитель:
|
|
||||
студент группы |
5А21 |
|
ФИО |
|
27.02.2024_ |
|
|
|
Кулешов К.Д. Плотникова М.Е. |
|
Дата сдачи |
Руководитель:
|
ФИО |
||||
преподаватель |
|
|
Горбенко М.В. |
|
|
|
|
|
|
|
|
Томск – 2024
Цель работы: Ознакомление с механизмами и приобретение практических навыков в составлении кинематических схем плоских механизмов, проведении структурного анализа, выделении звеньев и кинематических пар, групп Ассура, определении степени подвижности (W), составлении структурных формул.
Теоретическая часть
Любой механизм состоит из отдельных деталей, называемых звеньями, и кинематическими парами. Звеном называется твердое тело или несколько твердыхтел жестко соединенных между собой, реально представляющие конкретную деталь механизма. Звенья могут быть подвижными и неподвижными. Подвижные и неподвижные звенья соединяются между таким образом, что обеспечивается возможность их относительного движения.
КИНЕМАТИЧЕСКАЯ ПАРА (КП) – соединение звеньев, допускающие относительное их движение. Кинематические пары классифицируются по ряду признаков:
1) по числу условий связи, накладываемых на относительные движения звеньев;
2) по характеру соприкосновения звеньев.
Механизмы по характеру движения звеньев в пространстве могут быть плоскими и пространственными. Кинематическая пара плоских механизмов по 1 признаку делиться на два класса:
a) кинематическая пара 5 класса – Р5 (5 условий связи);
b) кинематическая пара 4 класса – Р4 (4 условия связи).
По 2 признаку КП могут быть двух видов:
a) низшие КП (элементами которых являются поверхности);
b) высшие КП (элементами которых являются линии или точки).
Кинематические пары 5 класса (Р5) могут быть двух видов:
1) вращательные (обозначаются символом В);
2) поступательные (обозначаются символом П).
Кинематические пары 4 класса (Р4) имеются в зубчатых, кулачковых и других механизмах (обозначаются символом ВП, ВВ, ПП).
СТЕПЕНЬ ПОДВИЖНОСТИ механизма есть число необходимых независимых движений его ведущих звеньев относительно стойки, при которых все остальные звенья движутся по определенному закону. Степень подвижности плоского механизма (W) определяется по формуле П.Л. Чебышева:

где n – число подвижных звеньев; P5 – число пар 5-го класса (одноподвижные кинематические пары); P4 – число пар 4-го класса (двухподвижные кинематические пары).
Структурный состав механизма: Каждый плоский механизм состоит из начальных механизмов и присоединённых к ним структурных групп (групп Ассура) с нулевой степенью подвижности. Начальные механизмы относятся к механизмам 1 класса. Группой Ассура называют кинематическую цепь, которая, в случае ее присоединения элементами внешних пар к стойке, получает нулевую степень подвижности.

Все механизмы в зависимости от сложности групп Ассура, разделяются на классы и порядки, определяемые классом и порядком наиболее сложных групп. К первому классу механизмов относятся начальные механизмы. Класс механизма соответствует классу наивысшей группы, входящей в его состав. Класс группы Ассура определяется сложностью контура их звеньев, входящих в группу. В состав группы II класса входит прямолинейный контур, в группу III класса – трехсторонний замкнутый контур, в группу IV класса – замкнутый четырехсторонний контур и т.д.
Практическая часть
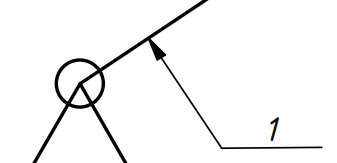
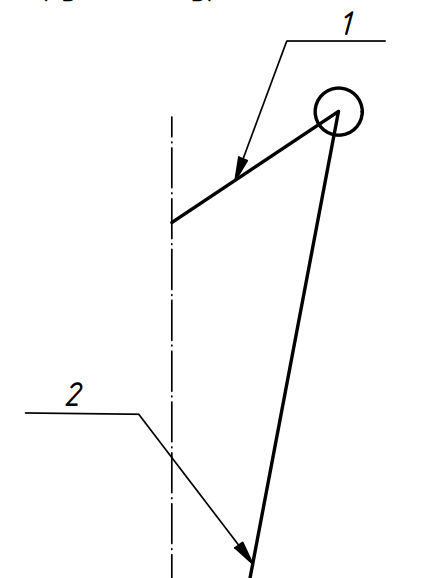
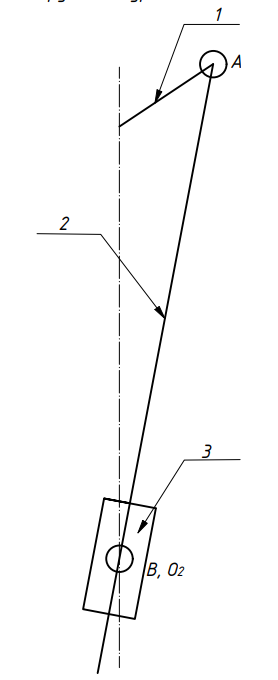
1.Разобьём механизм на звенья:
|
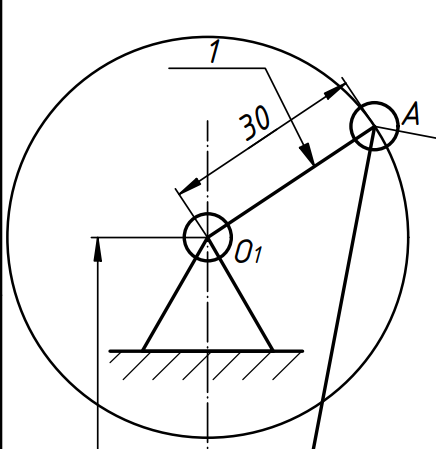
1 звено - Кривошип |
|
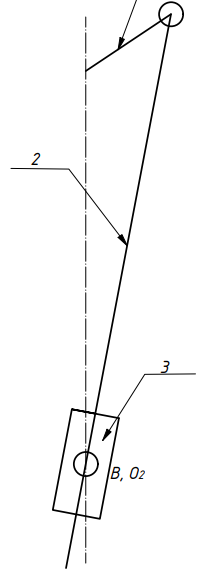
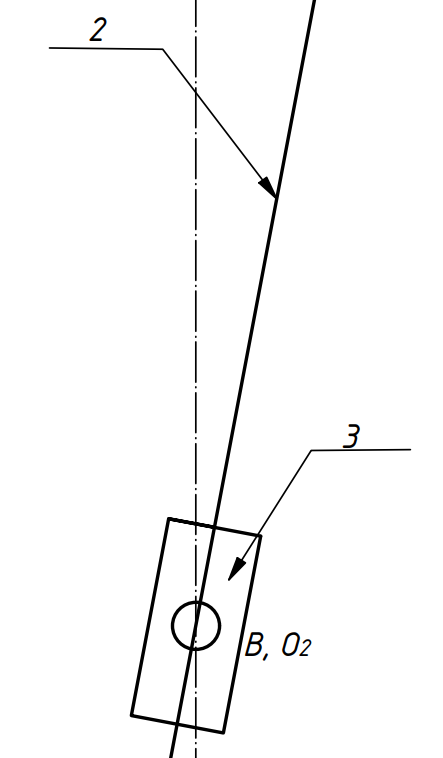
2 звено - кулиса - шатун |
|
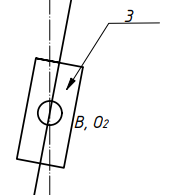
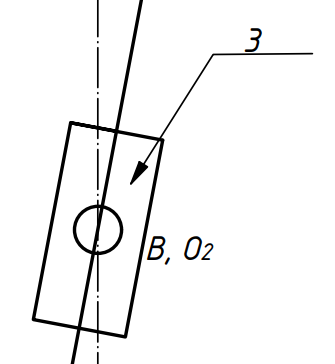
3 звено – камень кулисы- коромысло
|
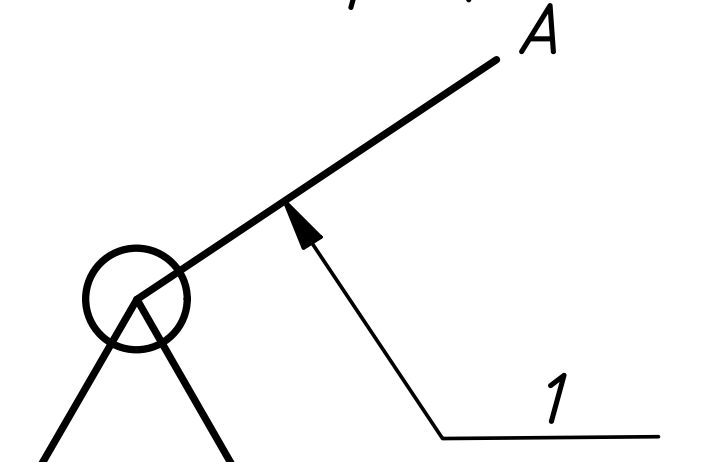
Анализ кинематических пар:
Схема |
Вид движения |
Вид |
Класс |
Высшая/ низшая |
|
Вращательное |
В01 |
Р5 |
Низшая |
|
Вращательное |
В12 |
Р5 |
Низшая |
|
Поступательное |
П23 |
Р5 |
Низшая |
|
Вращательное |
В30 |
Р5 |
Низшая |
Структурный состав механизма:
Схема |
Название |
Формула строения |
|
||
|
Начальный вращательный механизм первого класса |
В01 |
|
Группа Ассура II класса, II порядка, II вида |
В12-П23 -В30 |
Найдём степень свободы механизма по формуле Чебышева:
