

Заказы криво / механика 97723
.docxМИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное автономное образовательное учреждение высшего образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»

СТРУКТУРНЫЙ И КИНЕМАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
ИНДИВИДУАЛЬНОЕ ЗАДАНИЕ № 2
Вариант 97723
по дисциплине:
Механика 1.2
Исполнитель: |
|
|
|
студент группы |
5A23 |
Шляхов Т. |
08.12.2023 |
Руководитель: |
|
|
|
преподаватель |
|
Горбенко М.В. |
|
Томск – 2023
Задание
Для вычерченного механизма определить:
1) Названия звеньев, количество кинематических пар и групп Ассура.
2) Линейные скорости всех точек механизма и угловые скорости звеньев методом планов.
3) Линейные ускорения точек механизма и угловые ускорения звеньев методом планов.
4) Ускорение точки М располагающейся на звене АВ
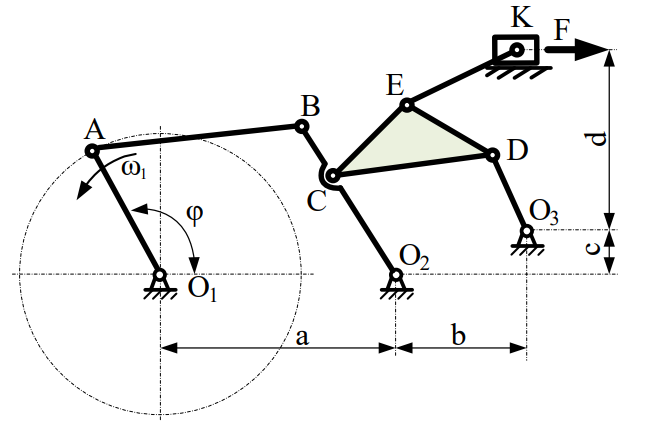
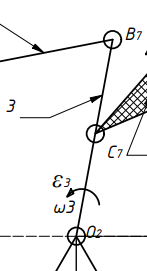
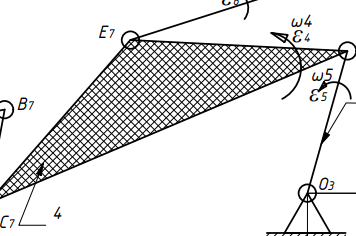
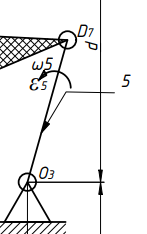
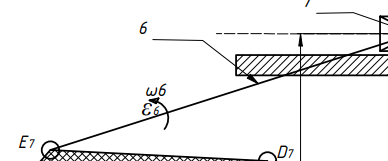
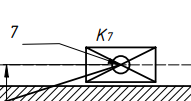
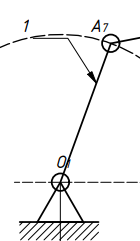
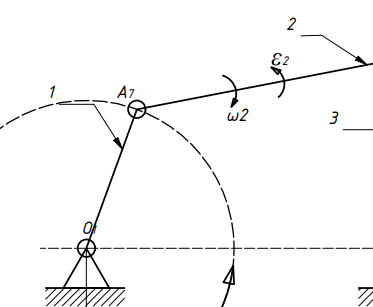
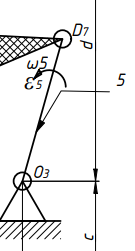
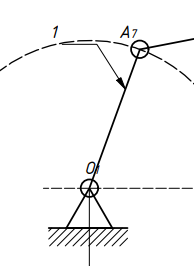
Рис.1: схема №9
Исходные данные: О1А = 170 мм, О2В = 230 мм, О3D = 170 мм, KE = 440 мм, AB = 350 мм, CB = 110 мм, CD = 450 мм, CE = 250 мм, DE = 250 мм, a = 360 мм, b = 390 мм, c = 130 мм, d = 310 мм
Угол поворота: 𝜑 = 250°.
Угловая скорость звена O1A: 𝜔= 3 𝑐−1.
Расположение
точки М на стержне АВ:

Решение
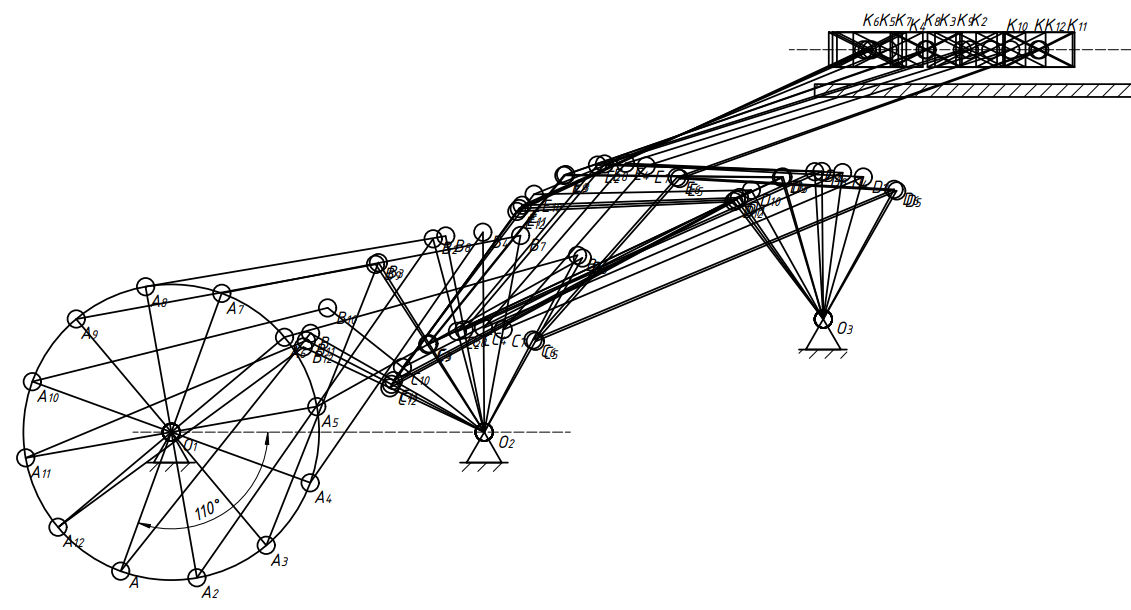
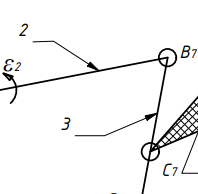
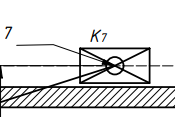
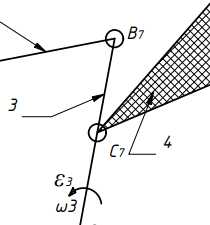
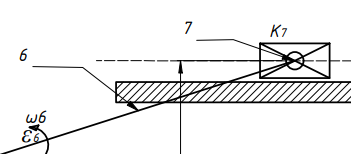
Рис. 2: 12 положений механизма
1.Типы звеньев
|
Кривошип |
|
Шатун |
|
Коромысло |
|
Шатун
|
|
Коромысло
|
|
Шатун |
|
Ползун |
Анализ кинематических пар:
Схема |
Вид движения |
Степень подвижности |
Вид |
Класс |
Высшая/ низшая |
|
Вращательное |
1 |
В01 |
Р5 |
Низшая |
|
Вращательное |
1 |
В12 |
Р5 |
Низшая |
|
Вращательное |
1 |
В30 |
Р5 |
Низшая |
|
Вращательное |
1 |
В05 |
Р5 |
Низшая |
|
Вращательное |
1 |
В46 |
Р5 |
Низшая |
|
Вращательное |
1 |
В23 |
Р5 |
Низшая |
|
Поступательное |
1 |
П07 |
Р5 |
Низшая |
|
Вращательное |
1 |
В34 |
Р5 |
Низшая |
|
Вращательное |
1 |
В67 |
Р5 |
Низшая |

Структурный анализ:
Схема |
Название |
Число звеньев |
|
|
|||
|
Начальный вращательный механизм первого класса |
1 |
В01 |
|
Группа Ассура II класса, II порядка, I вида |
3 |
В12-В23 В30 |
|
Группа Аcсура II класса, II порядка, III вида |
4 |
В34-В45-В46 |
|
Группа Ассура II класса, II порядка, II вида |
3 |
В46- В67-П70 |
Найдём степень свободы механизма по формуле Чебышева:

2. Определение линейных скоростей точек и угловых скоростей звеньев механизма.
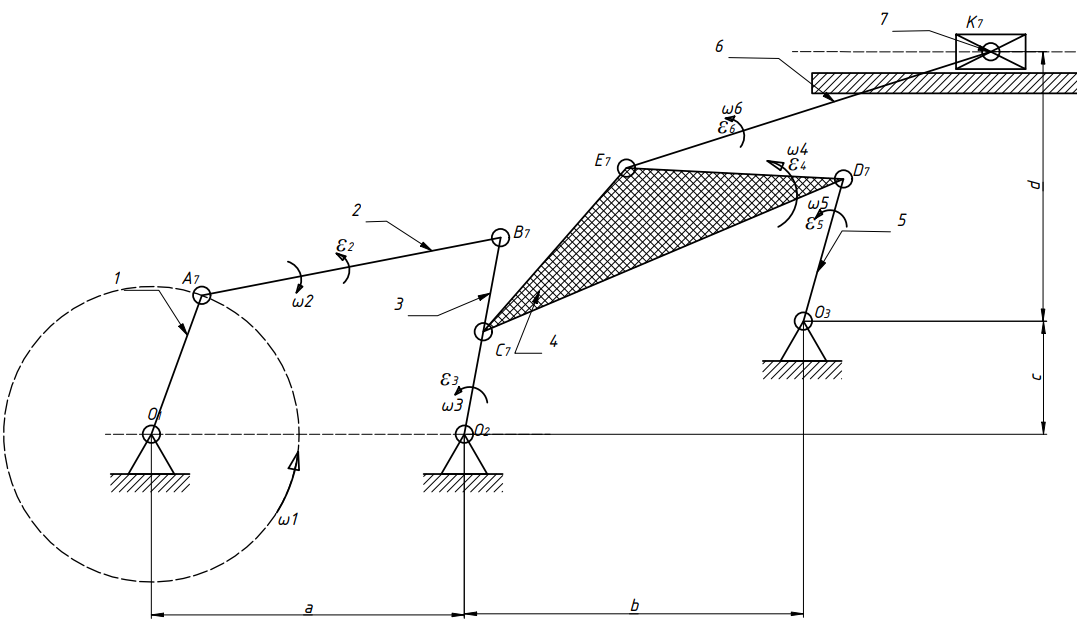
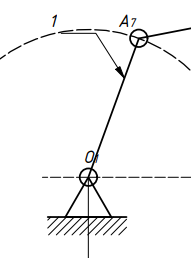
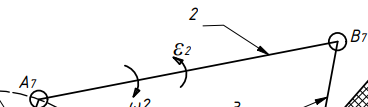
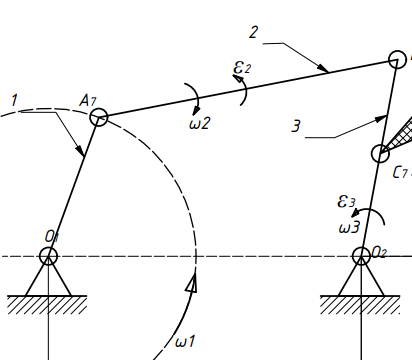
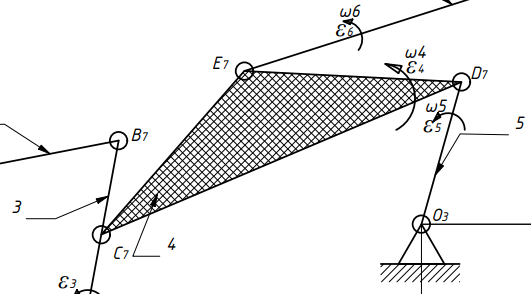
Рис. 3: Схема механизма для вычисления скоростей
1)Вычисляем скорость точки А:

Вектор скорости т. А перпендикулярен звену O1A.
Начинаем
строить план скоростей. Выбираем
масштабный коэффициент плана скоростей
 .
Из произвольно выбранного полюса
.
Из произвольно выбранного полюса проводим
луч
проводим
луч
 :
:
2)Определим скорость точки B. Данную точку рассматриваем относительно точек A и O2, т. к. их скорости нам известны.
 .
.
Вектор скорости VBA направлен перпендикулярно отрезку BA, а вектор
скорости
 направлен
перпендикулярно отрезку BO2.
Проводим луч
b
из полюса вдоль направления
.
Из точки А
вдоль VBA
проводим луч ab.
На получившемся пересечении ставим
точку b. Из
рисунка видно, что
направлен
перпендикулярно отрезку BO2.
Проводим луч
b
из полюса вдоль направления
.
Из точки А
вдоль VBA
проводим луч ab.
На получившемся пересечении ставим
точку b. Из
рисунка видно, что
ab = 38,9 мм
b = 65,5 мм.
Следовательно


Угловая скорость:
3)Скорость
точки C:
Так как точка С лежит на стержне
 ,
можно выразить скорость точки С через
пропорцию.
,
можно выразить скорость точки С через
пропорцию.

Отсюда
4)Уравнения для точки D:
 .
.
 =
33,8 мм
=
33,8 мм
dc = 3,7 мм
VD
=

 =
0,17 м⁄с
=
0,17 м⁄с
VDC = dc = 0,018 м⁄с
Угловые скорости:
5)Уравнения для точки E:

 =
33,94 мм
=
33,94 мм
ec = 2,07 мм
ed = 2,07 мм
VE = = 0,17 м⁄с
VED = ed = 0,01 м⁄с
VEC = ec = 0,01 м⁄с
Угловые скорости:
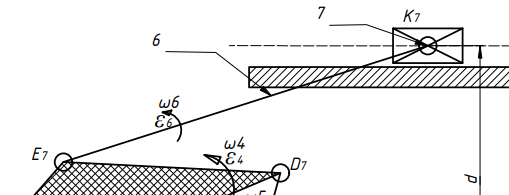
6)Рассчитаем точку K.
VK1 = 0


Угловая скорость:

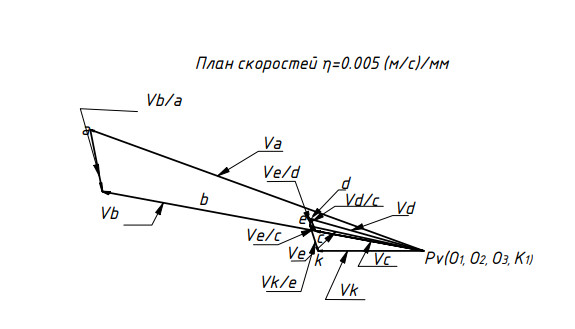
Рис. 4: План скоростей
3. Определение линейных ускорений точек и угловых ускорений звеньев механизма методом планов
1)Определяем ускорение точки А звена О1А при помощи теоремы об ускорениях точек плоской фигуры:

Ускорение точки
 .
Т.к. звено О1А вращается
равномерно (ω1=const),
следователь
.
Т.к. звено О1А вращается
равномерно (ω1=const),
следователь .
В этом случае
имеем:
.
В этом случае
имеем:

Вектор нормального ускорения направлен параллельно О1А от точки А к центу О1
Строим план ускорений. Выбираем масштаб плана ускорений μa = 0,01 (м/с2)/мм
Из
произвольно выбранного полюса pa
проводим луч
 ,
изображающий в выбранном масштабе
ускорение точки A:
,
изображающий в выбранном масштабе
ускорение точки A:
2)Для определения ускорения точки B, рассмотрим движение этой точки относительно точек, ускорения которых нам.
Составим систему уравнений, описывающих движение точки B:
Величина этого ускорения равна:

На плане ускорений из точки
 проведём отрезок
проведём отрезок
 ,
показывающий направление и величину
нормального ускорения точки B относительно
точки A. Длина отрезка an(b/a)
с учетом масштабного коэффициента:
,
показывающий направление и величину
нормального ускорения точки B относительно
точки A. Длина отрезка an(b/a)
с учетом масштабного коэффициента:
Также делаем и для точки O2:





Определим угловые ускорения:
3)Для точки C: Способ аналогичный способу при нахождении скорости точки C, пропорция

Тогда


4)Составим систему уравнений скоростей для точки D:

Тогда длина отрезка:
Зная длины, найдем тангенциальные и полные ускорения:

Угловые ускорения для звеньев 5 и 6 будут равны:
5)Для точки Е:




6)Для того, чтобы определить ускорение точки К, составим систему уравнений:

Из плана ускорений находим:


4)Ускорение точки М.
Из условия AM:MB = 4:1, тогда


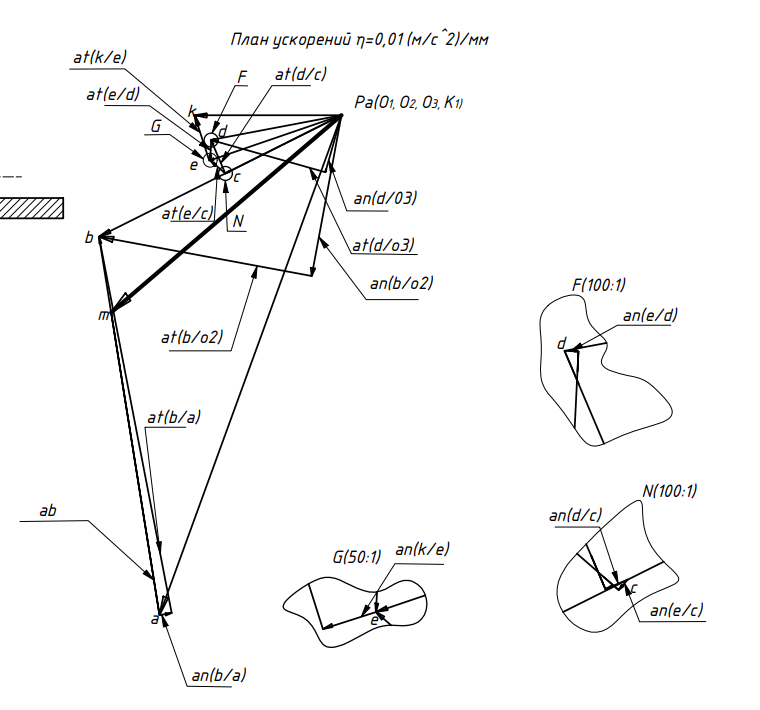
Рис.4