

Часть2, рефераты / Вопросы / vopros_36
.docx36. Сельсины. Дифференциальный режим работы.
В различных отраслях промышленности, в системах автоматики и контроля часто возникает необходимость синхронного и синфазного вращения или поворота двух и более осей, механически не связанных друг с другом. Такие задачи решаются с помощью систем синхронной связи.
Различают два вида систем синхронной связи: синхронного вращения ("электрический вал"); и синхронного поворота ("передача угла").
В простейшем случае "электрический вал" может быть реализован на двух одинаковых асинхронных двигателях с фазным ротором, обмотки статора которых питаются от одной и той же сети трехфазного тока, а обмотки ротора соединены друг с другом (рисунок 1).
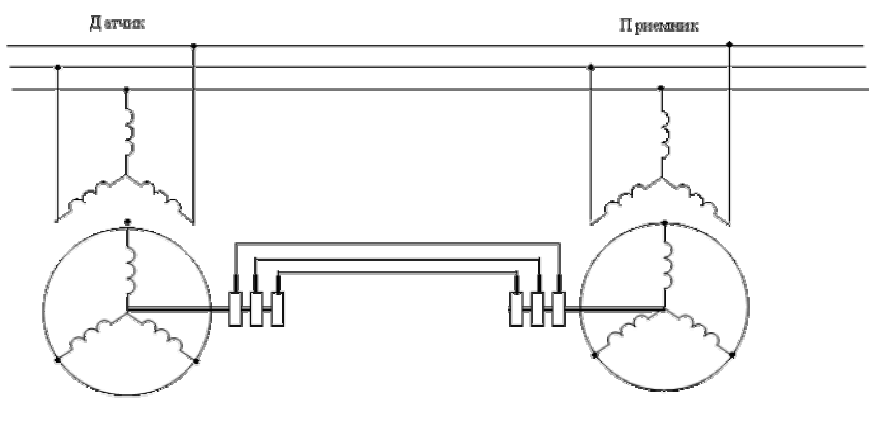
Рисунок 1- Схема "электрического вала"
Системы передачи угла осуществляются с помощью специальных индукционных микромашин – сельсинов. Сельсинами (от английского слова "selfsinchroniring") называются электрические микромашины переменного тока, обладающие свойством самосинхронизации.
Сельсины бывают трехфазные и однофазные.
Трехфазные сельсины конструктивно ничем не отличаются от асинхронных двигателей с фазным ротором. Однако они не получили большого распространения главным образом из–за неравенства синхронизирующих моментов при повороте ротора по полю и против поля.
Однофазные сельсины конструктивно похожи на синхронные машины малой мощности, обмотка возбуждения которых питаются переменным током.
В системах автоматики "передача угла" осуществляется по двум, принципиально разным схемам: индикаторной и трансформаторной.
Индикаторная схема используется там, где на приемной оси небольшой момент статического сопротивления (стрелка, шкала прибора и т.п.). В этих схемах сельсин–приемник самостоятельно отрабатывает угол, заданный датчиком.
Трансформаторная схема применяется в тех случаях, когда на приемной оси имеется значительный момент сопротивления. В таких схемах сельсин–приемник лишь управляет мощным силовым двигателем, осуществляющим поворот какого–то механизма.
Строго говоря, в каждой схеме должны использоваться свои сельсины: индикаторные или трансформаторные, хотя один и тот же сельсин может работать в любой из них.
Дифференциальные сельсины (ДС) применяются в тех случаях, когда приемная ось должна поворачиваться на угол, равный сумме или разности углов поворота двух задающих осей. На рисунке 2 представлена схема индикаторной связи с использованием в качестве приемника дифференциального сельсин.
Конструктивно дифференциальный сельсин не отличается от асинхронного двигателя с фазным ротором.
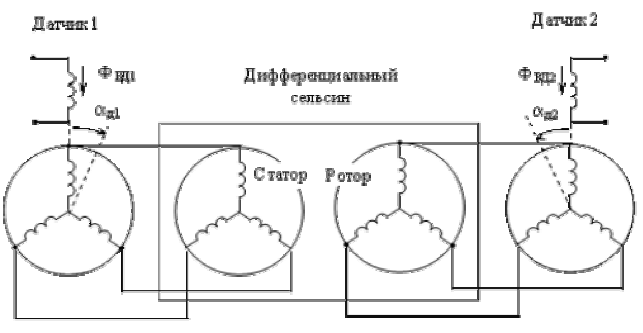
Рисунок 2- Система синхронной связи с дифференциальным сельсином
Магнитные потоки возбуждения первого и второго датчиков Фв1, Фв2 индуцируют в обмотках синхронизации ЭДС, под действием которых протекают токи и возникают магнитные потоки статора и ротора дифференциального сельсина Фс, Фр. В согласованном положении (aд1=0, aд2=0) эти потоки совпадают и момент ДС равен нулю (рисунок 3, а).
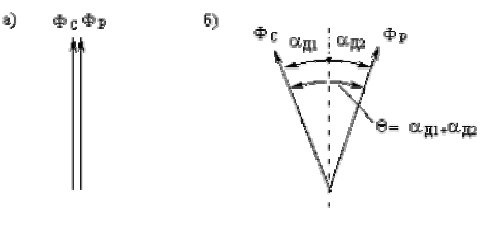
Рисунок 3- К вопросу о работе дифференциального сельсина
При повороте датчиков на углы aд1 и aд2 на такие же углы, но в обратном направлении (см. § 5.6) повернутся магнитные потоки статора и ротора ДС. Между ними образуется угол q в данном случае равный сумме углов aд1 и aд2 (рис.5.16 б). Стремление потоков Фс, Фр снова придти в согласованное положение приводит к образованию вращающего момента ДС, под действием которого его ротор поворачивается на угол q. Направление поворота ротора ДС всегда совпадает с направлением поворота вектора Фр к вектору Фс. Если датчики повернуть на углы aд1 и aд2 в одном направлении, ротор ДС повернется на угол q, равный их разности.